開(kāi)源項(xiàng)目,從感知到控制、從定位到構(gòu)圖、從導(dǎo)航到可視化,都使用ROS作為基礎(chǔ)。 而不久前AMD XILINX推出了以ROS2為中心的增強(qiáng)機(jī)器人自適應(yīng)計(jì)算能力的硬件加速方法——Kria Robotics Stack(KRS),通過(guò)硬件加速為機(jī)器人帶來(lái)自適應(yīng)計(jì)算能力。 從ROS到
2022-12-12 06:25:00 2809
2809 請(qǐng)各位大神指導(dǎo),移動(dòng)式機(jī)器人是怎么做EMC保護(hù)的,機(jī)器人是鋰電池供電,所以就不能接大地了,那么對(duì)機(jī)器人的干擾是通過(guò)何種方式來(lái)釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
介紹了日本舉辦的全國(guó)性機(jī)器人大賽的有關(guān)信息,參賽機(jī)器人的基本結(jié)構(gòu)、制作方法,以及制作所有材料。書(shū)后給出了書(shū)中所用到的零部件的生產(chǎn)廠(chǎng)家及商品名稱(chēng)。 本書(shū)可作為大、中、小學(xué)生參加競(jìng)技機(jī)器人大賽或制作競(jìng)技
2015-02-22 07:34:56
。機(jī)器人主要有兩大類(lèi):用于制造環(huán)境下的工業(yè)機(jī)器人和用于非制造環(huán)境下的服務(wù)機(jī)器人。工業(yè)機(jī)器人是一種對(duì)生產(chǎn)環(huán)境和生產(chǎn)條件
2021-09-01 06:45:48
的機(jī)器。一些書(shū)呆子式的語(yǔ)言可能會(huì)把它描述成“一個(gè)可重新編程的多功能機(jī)械手,旨在通過(guò)各種編程的動(dòng)作移動(dòng)材料、部件、工具或?qū)iT(mén)設(shè)備,以完成各種任務(wù)”。這個(gè)定義非常具有表現(xiàn)力。那么制造機(jī)器人的要素是什么呢
2022-03-31 10:31:31
,沒(méi)有節(jié)假日釋放生產(chǎn)力機(jī)器人可完成耗時(shí)的工作,釋放人力去執(zhí)行更為增值的任務(wù)提高質(zhì)量提高工作質(zhì)量,避免出現(xiàn)人為錯(cuò)誤而導(dǎo)致返工的幾率,準(zhǔn)確率接近100%高度可擴(kuò)展性輕松擴(kuò)展,快速培訓(xùn)和部署降低成本成本降至原來(lái)人工執(zhí)行的1/9
2018-09-23 11:34:37
`在論壇看到了那個(gè)波士頓動(dòng)力公司的斑點(diǎn) 獵豹 大狗 野貓 這幾種軍用機(jī)器人,也看了那些個(gè)測(cè)試視頻,他們的那些關(guān)節(jié)結(jié)構(gòu)是怎樣設(shè)計(jì)的啊?是液壓還是機(jī)械?`
2015-03-09 11:41:04
機(jī)器人的定義是什么?機(jī)器人優(yōu)點(diǎn)和缺點(diǎn)是什么?機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人的應(yīng)用有哪些?
2021-07-05 06:48:21
機(jī)器人的移動(dòng)通常是從管理機(jī)器人總體任務(wù)進(jìn)度的中央處理器發(fā)出位置變化請(qǐng)求時(shí)開(kāi)始的。導(dǎo)航系統(tǒng)通過(guò)制定行程計(jì)劃或軌跡以開(kāi)始執(zhí)行位置變化請(qǐng)求。行程計(jì)劃需考慮可用路徑、已知障礙位置、機(jī)器人能力及任何相關(guān)的任務(wù)目標(biāo)。
2019-09-10 10:44:32
目前產(chǎn)業(yè)機(jī)器人僅能在嚴(yán)格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動(dòng)作,缺乏對(duì)環(huán)境的感知與應(yīng)變能力,這極大地限制了機(jī)器人的應(yīng)用。利用機(jī)器人的視覺(jué)控制,不需要預(yù)先對(duì)產(chǎn)業(yè)機(jī)器人的運(yùn)動(dòng)軌跡進(jìn)行示教或離線(xiàn)編程,可節(jié)約
2015-01-23 15:02:27
結(jié)構(gòu)化設(shè)計(jì)分為哪幾部分?結(jié)構(gòu)化設(shè)計(jì)的要求有哪些?結(jié)構(gòu)化設(shè)計(jì)主要包括哪些部分?
2021-12-23 06:15:51
Deeplearningai 結(jié)構(gòu)化機(jī)器學(xué)習(xí)項(xiàng)目 Week2 6-10
2020-05-18 15:12:43
無(wú)論是傳統(tǒng)的工業(yè)機(jī)器人系統(tǒng),還是當(dāng)今最先進(jìn)的協(xié)作機(jī)器人(Cobot),它們都要依靠可生成大量高度可變數(shù)據(jù)的傳感器。這些數(shù)據(jù)有助于構(gòu)建更佳的機(jī)器學(xué)習(xí)(ML)和人工智能(AI)模型。而機(jī)器人依靠這些模型變得“自主”,可在動(dòng)態(tài)的現(xiàn)實(shí)環(huán)境中做出實(shí)時(shí)決策和導(dǎo)航。
2020-08-05 07:08:21
取特征點(diǎn),涉及大量像素級(jí)比較運(yùn)算;優(yōu)化機(jī)器人位姿,需要迭代求解大規(guī)模矩陣方程。書(shū)中提出了模塊化的硬件加速方案,闡述了如何以因子圖為通用模版,以求解非線(xiàn)性?xún)?yōu)化問(wèn)題為橋梁,面向多種機(jī)器人應(yīng)用進(jìn)行加速。
第11
2025-01-04 01:15:05
和經(jīng)驗(yàn)積累,使機(jī)器人能夠自主發(fā)現(xiàn)工藝規(guī)律,優(yōu)化作業(yè)參數(shù)。家庭服務(wù)機(jī)器人則采用混合任務(wù)規(guī)劃策略:將預(yù)訓(xùn)練的基礎(chǔ)技能與實(shí)時(shí)規(guī)劃相結(jié)合,靈活應(yīng)對(duì)開(kāi)放環(huán)境中的各種情況。
第9章深入探討了元學(xué)習(xí)在具身智能中
2024-12-24 15:03:54
提高機(jī)器人的自適應(yīng)性和自主性,賦能機(jī)器人在多種場(chǎng)景中的應(yīng)用。例如在家庭自動(dòng)化領(lǐng)域,具身智能機(jī)器人能夠感知家庭成員的日常習(xí)慣和需求,自動(dòng)執(zhí)行清潔、整理或其他家務(wù)任務(wù)。它們通過(guò)觀察家庭成員的活動(dòng)模式和反應(yīng)
2024-12-20 19:17:04
出現(xiàn)重大問(wèn)題。此外,機(jī)器人在不同環(huán)境中適應(yīng)和泛化的能力取決于它處理的數(shù)據(jù)的多樣性。例如,家庭服務(wù)機(jī)器人必須適應(yīng)各種家庭環(huán)境和任務(wù),要求它們從廣泛的家庭環(huán)境數(shù)據(jù)中學(xué)習(xí),以提高其泛化能力。
訓(xùn)練 EAI
2024-12-24 00:33:31
根據(jù)結(jié)構(gòu)化道路環(huán)境的特點(diǎn)提出了一種將邊沿檢測(cè)和道路環(huán)境知識(shí)相結(jié)合的機(jī)器視覺(jué)算法 , 并結(jié)合基于行為響應(yīng)的路徑規(guī)劃方法和智能預(yù)瞄控制方法 , 實(shí)現(xiàn)了一套基本的機(jī)器人視覺(jué)導(dǎo)航系統(tǒng) . 在自主機(jī)器人實(shí)驗(yàn)
2023-09-25 07:23:39
就成為當(dāng)今研究的重點(diǎn),在此研究自適應(yīng)控制來(lái)解決機(jī)器人的控制問(wèn)題。當(dāng)操作機(jī)器人的工作環(huán)境及工作目標(biāo)的性質(zhì)和特征在工作過(guò)程中隨時(shí)發(fā)生變化時(shí),控制因素具有未知性和不確定的特性。這種未知因素和不確定性將使
2023-09-21 07:55:45
系統(tǒng)。當(dāng)今工業(yè)機(jī)器人技術(shù)正逐漸向著具有行走能力、具有多種感知能力、具有較強(qiáng)的對(duì)作業(yè)環(huán)境的自適應(yīng)能力的方向發(fā)展。目前,對(duì)全球機(jī)器人技術(shù)的發(fā)展最有影響的國(guó)家是美國(guó)和日本。美國(guó)在工業(yè)機(jī)器人技術(shù)的綜合研究水平
2015-01-19 10:58:38
近年來(lái),我國(guó)機(jī)器人產(chǎn)業(yè)取得了良好的發(fā)展成果,不管是工業(yè)機(jī)器人、服務(wù)機(jī)器人還是特種機(jī)器人都獲得了廣泛的應(yīng)用。這一方面與全球自動(dòng)化生產(chǎn)需求的不斷釋放,以及人口紅利的日漸式微密切相關(guān),另一方面更是得益于各種智能技術(shù)的持續(xù)進(jìn)步與完善。
2020-08-14 07:14:27
重點(diǎn)放在了強(qiáng)適應(yīng)性和可重構(gòu)的裝配、仿人靈巧操作、非結(jié)構(gòu)化環(huán)境的感知、教育訓(xùn)練、機(jī)器人與人共事的安全性等方面。 日本 日本的機(jī)器人產(chǎn)業(yè)和技術(shù)都很發(fā)達(dá)。在日本的機(jī)器人路線(xiàn)中,新世紀(jì)工業(yè)機(jī)器人、服務(wù)機(jī)器人
2016-01-28 15:21:21
)擬人化:6軸工業(yè)機(jī)器人結(jié)合機(jī)器人與人的特點(diǎn)。在6軸工業(yè)機(jī)器人的結(jié)構(gòu)上有類(lèi)似人的行走、腰轉(zhuǎn)、大臂、小臂、手腕、手爪等部分,在控制上有電腦。其傳感器提高了工業(yè)機(jī)器人對(duì)周?chē)?b class="flag-6" style="color: red">環(huán)境的自適應(yīng)能力。3)通用性:一般
2017-08-08 11:30:29
請(qǐng)問(wèn)哪位大神做過(guò)真空吸附式或者非磁鐵式的爬墻機(jī)器人,能否提供一些經(jīng)驗(yàn)或者資料
2015-03-26 10:43:20
機(jī)器人是先進(jìn)的機(jī)電一體化數(shù)字化裝備,集機(jī)械、電子、控制、計(jì)算機(jī)、傳感器、人工智能等多學(xué)科高新技術(shù)于一體,技術(shù)附加值很高。對(duì)提高產(chǎn)品的質(zhì)量與產(chǎn)量、保障人身安全,改善勞動(dòng)環(huán)境,減輕勞動(dòng)強(qiáng)度,提高勞動(dòng)生產(chǎn)率
2015-09-02 14:03:18
改變機(jī)器人自身結(jié)構(gòu),從而調(diào)節(jié)載物平面的傾斜程度,最后實(shí)現(xiàn)載物平面的平穩(wěn),達(dá)到平穩(wěn)運(yùn)輸?shù)囊蟆A硗猓?“變結(jié)構(gòu)智能服務(wù)機(jī)器人” 很好的結(jié)合輪式機(jī)器人和足式機(jī)器人的優(yōu)點(diǎn),根據(jù)不同的環(huán)境會(huì)及時(shí)改變“腿部”彎曲
2013-10-31 13:05:45
效果。付夢(mèng)印等提出以踢腳線(xiàn)為參考目標(biāo)的導(dǎo)航方法,可提高視覺(jué)導(dǎo)航的實(shí)時(shí)性。 這里采用視覺(jué)導(dǎo)航方式,機(jī)器人在基于結(jié)構(gòu)化道路的環(huán)境下實(shí)現(xiàn)道路跟蹤,目標(biāo)點(diǎn)的停靠,以及導(dǎo)游解說(shuō),并取得較好的效果。2 導(dǎo)覽機(jī)器人
2019-07-04 08:30:00
基于結(jié)構(gòu)自適應(yīng)的多機(jī)器人協(xié)作機(jī)制研究
2012-08-20 13:43:51
/VALproduct/uniVAL三種編程方法滿(mǎn)足集成商、最終用戶(hù)、設(shè)備商的不同需求。可實(shí)現(xiàn)多機(jī)器人同步,人機(jī)協(xié)作。)作為一種成本低廉、系統(tǒng)結(jié)構(gòu)簡(jiǎn)單的自動(dòng)化機(jī)器人系統(tǒng)解決方案,多軸機(jī)器人可以被應(yīng)用于點(diǎn)膠、滴塑、噴涂
2020-07-29 06:57:04
公司副總裁、迪士尼夢(mèng)幻工程公司主管,現(xiàn)任美國(guó)Olin學(xué)院SCOPE項(xiàng)目主管,)在2009年NIWeek圖形化系統(tǒng)設(shè)計(jì)會(huì)議上總結(jié)了當(dāng)前機(jī)器人開(kāi)發(fā)所面臨的三大挑戰(zhàn):創(chuàng)造更小、更輕、更強(qiáng)大的電池;創(chuàng)造更小
2019-07-31 07:17:18
,智能化已成為工程機(jī)械行業(yè)的主要趨勢(shì)和方向發(fā)展。那么要想機(jī)器人準(zhǔn)確高效地執(zhí)行任務(wù),機(jī)器人內(nèi)部的各處連接必定不能有任何差錯(cuò)。這時(shí)候,機(jī)器人線(xiàn)束的壓接形式顯得相當(dāng)重要,我們也需要對(duì)它嚴(yán)格要求。壓接的線(xiàn)束必須
2017-04-25 16:34:23
計(jì)算量增大,一般的單片機(jī)等處理器很難完成控制要求。而基于ARM的嵌入式服務(wù)機(jī)器人的控制器采用分層與模塊化結(jié)構(gòu),充分體現(xiàn)可擴(kuò)展性、可移植性的設(shè)計(jì)原則.同時(shí)具有低成本、低功耗、體積小巧、可靠性高、智能化高以及通用性等特點(diǎn)。那么我們具體該 如何利用ARM研究嵌入式服務(wù)機(jī)器人控制器呢?
2019-07-30 07:02:31
機(jī)器人不具備信息反饋,側(cè)為可程序控制系統(tǒng),適應(yīng)性控制系統(tǒng)和人工控制系統(tǒng)。,根據(jù)控制運(yùn)動(dòng)的形式,可以分為點(diǎn)控和軌跡控制。深圳標(biāo)工機(jī)器人自動(dòng)化設(shè)備有限公司將打造‘國(guó)內(nèi)工業(yè)機(jī)器人集成應(yīng)用系統(tǒng)第一品牌’強(qiáng)大的團(tuán)隊(duì)
2016-03-06 12:56:19
隨著科技的進(jìn)步,機(jī)器人技術(shù)正在向智能機(jī)器和智能系統(tǒng)的方向發(fā)展,其發(fā)展趨勢(shì)主要為結(jié)構(gòu)的模塊化和可重構(gòu)化;控制技術(shù)的開(kāi)放化、可配置化;伺服驅(qū)動(dòng)技術(shù)的數(shù)字化和分散化;多傳感器融合技術(shù)的實(shí)用化。機(jī)器人的內(nèi)涵
2019-08-20 07:21:01
力控制、阻抗控制、力位混合控制 ;3)智能化的控制方式 :模糊控制、自適應(yīng)控制、最優(yōu)控制、神經(jīng)網(wǎng)絡(luò)控制、模糊神經(jīng)網(wǎng)絡(luò)控制 、專(zhuān)家控制以及其他;4、控制系統(tǒng)硬件配置及結(jié)構(gòu):由于機(jī)器人的控制過(guò)程中涉及大量
2018-10-12 10:16:22
工業(yè)機(jī)器人一般由主構(gòu)架(手臂)、手腕、驅(qū)動(dòng)系統(tǒng)、測(cè)量系統(tǒng)、控制器及傳感器等組成。 1圖是工業(yè)機(jī)器人的典型結(jié)構(gòu)。機(jī)器人手臂具有3個(gè)自由度(運(yùn)動(dòng)坐標(biāo)軸),機(jī)器人作業(yè)空間由手臂運(yùn)動(dòng)范圍決定。手腕是機(jī)器人
2015-01-19 10:36:12
模塊化的控制系統(tǒng)體系結(jié)構(gòu):采用分布式CPU計(jì)算機(jī)結(jié)構(gòu),分為機(jī)器人控制器(RC),運(yùn)動(dòng)控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機(jī)器人控制器(RC)和編程示教盒通過(guò)串口/CAN總線(xiàn)
2018-11-23 10:40:38
很多人喜歡玩機(jī)器人,四軸,智能車(chē),在這里給大家推薦一本書(shū),書(shū)名叫做《BeagleBone 機(jī)器人開(kāi)發(fā)指南》這本書(shū)里面說(shuō)的細(xì)節(jié)雖然不是很多,但是各種機(jī)器人設(shè)計(jì)所需要的基本資源都說(shuō)的很清楚,還舉了很多典型的應(yīng)用例子,比如比如用opencv來(lái)demo人臉識(shí)別等讀起來(lái)非常輕松入門(mén)非常不錯(cuò)的參考
2016-01-08 17:54:59
研究人員將其拆開(kāi)。該團(tuán)隊(duì)表示,此項(xiàng)技術(shù)可被用于在地形條件未知的偏遠(yuǎn)環(huán)境中建造結(jié)構(gòu),比如在極端天氣事件之后,因?yàn)榻ㄔ熘噶羁杀粺o(wú)線(xiàn)傳送給機(jī)器人。然后,它們?cè)谌魏慰赡艹霈F(xiàn)在其路徑上的障礙附近改造藍(lán)圖,以適應(yīng)地形
2018-10-11 14:05:27
關(guān)于ros智能機(jī)器人,就是一個(gè)寫(xiě)智能機(jī)器人代碼的一個(gè)虛擬機(jī),
2021-10-13 19:20:16
吸塵機(jī)器人作為服務(wù)機(jī)器人領(lǐng)域的一個(gè)新產(chǎn)品,結(jié)合了機(jī)器人和吸塵器技術(shù),能在無(wú)人看守情況下輕松地完成室內(nèi)環(huán)境的吸塵等清潔工作,越來(lái)越受到人們的歡迎。
2020-03-18 06:18:37
傳感器和WiFi聯(lián)接是對(duì)掃地機(jī)器人嵌入式開(kāi)發(fā)的重要一步,開(kāi)發(fā)快提供的方案主要采用M230 WiFi模塊,在硬件上實(shí)現(xiàn)無(wú)線(xiàn)數(shù)據(jù)轉(zhuǎn)換以及無(wú)線(xiàn)控制。支持串口透明數(shù)據(jù)傳輸模式,可以使傳統(tǒng)的串口設(shè)備可輕松接入
2017-05-27 13:31:20
智能監(jiān)控機(jī)器人是近年來(lái)機(jī)器人應(yīng)用工程中一項(xiàng)前沿性的題目,智能化探測(cè)小車(chē)是智能行走機(jī)器人的一種。智能監(jiān)控機(jī)器小車(chē)就是針對(duì)上述情況,在參考了目前大多數(shù)智能機(jī)器人的基礎(chǔ)上,以降低成本為原則設(shè)計(jì)的。小車(chē)具備
2019-10-14 07:37:52
;3.可語(yǔ)音控制,可手機(jī)控制,可由電腦控制; 4.能夠?qū)崟r(shí)傳回圖像;5.搭載溫度傳感器、濕度傳感器、氣壓傳感器、地磁場(chǎng)傳感器等多種傳感器,能夠?qū)崟r(shí)獲取機(jī)器人所處環(huán)境的各種數(shù)據(jù);6.加入自動(dòng)尋找充電站功能
2015-12-02 19:08:42
很強(qiáng)的環(huán)境適應(yīng)能力和很高的可靠性,使它在工作時(shí)不會(huì)發(fā)生故障。 2,適用性強(qiáng)。核電站內(nèi)的設(shè)備很多,各種管道錯(cuò)綜復(fù)雜,通道狹隘,工作空間小。因此要求核工業(yè)機(jī)器人能順利通過(guò)各種障礙物和狹隘的通道,并且最好
2017-08-07 11:26:13
的合作。公司致力于各類(lèi)移動(dòng)機(jī)器人產(chǎn)品的研發(fā)與銷(xiāo)售,如餐飲機(jī)器人,巡檢機(jī)器人,安防機(jī)器人等各類(lèi)移動(dòng)機(jī)器人。公司致力于為工廠(chǎng)以及物流倉(cāng)儲(chǔ)行業(yè)提供無(wú)人化、智能化的設(shè)備,如各種不同應(yīng)用場(chǎng)景的AGV,包括
2017-06-10 14:24:17
焊接機(jī)器人的原理:焊接機(jī)器人是一種高度自動(dòng)化的設(shè)備,焊接機(jī)器人的基本工作原理是示教再現(xiàn),即由用戶(hù)導(dǎo)引機(jī)器人,一步步按實(shí)際任務(wù)操作一遍,機(jī)器人在導(dǎo)引過(guò)程中自動(dòng)記憶示教的每個(gè)動(dòng)作的位置、姿態(tài)、運(yùn)動(dòng)參數(shù)
2020-11-16 16:18:45
我是新人,求幫助啊,明天需要提交輪式機(jī)器人應(yīng)用的報(bào)告,求大神給點(diǎn)建議,可用輪式機(jī)器人應(yīng)用于那些方面,要求實(shí)際可行,應(yīng)用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
機(jī)器人的設(shè)計(jì)需求。工業(yè)方向的高性能嵌入式處理器不算多,飛思卡爾的imx系列可以算一個(gè)不錯(cuò)的平臺(tái),主要是接口豐富,可定制化的形態(tài)較多,滿(mǎn)足機(jī)器人多元化接口的需求。同時(shí)imx系列對(duì)Ubuntu,Android
2017-06-09 17:18:49
如何用STM32通過(guò)計(jì)數(shù) 如何實(shí)現(xiàn)控制機(jī)器人的各種行走動(dòng)作
2016-06-07 09:49:43
模塊化可重構(gòu)機(jī)器人由若干個(gè)相同的機(jī)器人模塊組合裝配而成,能夠重構(gòu)成不同的幾何形態(tài)和結(jié)構(gòu),從而適應(yīng)不同的作業(yè)任務(wù)要求。本論文主要對(duì)樹(shù)狀拓?fù)?b class="flag-6" style="color: red">結(jié)構(gòu)的模塊化機(jī)器人的重
2009-05-25 14:41:38 28
28 本文在深入研究已有負(fù)載均衡策略的基礎(chǔ)上,提出了一種建立在結(jié)構(gòu)化P2P 上基于Chord 的自適應(yīng)高可用性混合負(fù)載均衡策略——RGP(Replication and Gossip Policy)。該策略結(jié)合了流言傳播
2009-08-14 16:25:1917 RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計(jì)、輕巧、高精度的協(xié)作機(jī)器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性?xún)r(jià)比更高,為您解決機(jī)器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-17 15:02:00
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計(jì)、輕巧、高精度的協(xié)作機(jī)器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性?xún)r(jià)比更高,為您解決機(jī)器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-17 15:07:26
深圳泰科智能TB6-R5協(xié)作機(jī)器人是一款靈活的輕型工業(yè)協(xié)作機(jī)器人,具有精巧的機(jī)械結(jié)構(gòu)設(shè)計(jì)。這款協(xié)作機(jī)器人有效負(fù)載為5KG,自重僅為23KG,重復(fù)定位精度可達(dá)±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)
2023-04-17 15:15:06
深圳泰科智能TB6-R10協(xié)作機(jī)器人是一款功能更強(qiáng)的工業(yè)級(jí)協(xié)作機(jī)器人,能夠勝任10KG的有效負(fù)載的自動(dòng)化任務(wù),工作半徑可達(dá)1333mm,適用于大范圍、大負(fù)載的作業(yè)任務(wù),可應(yīng)用于工廠(chǎng)自動(dòng)化、汽車(chē)、3C、醫(yī)療、電力、科研、教育等多個(gè)行業(yè)、多場(chǎng)景的自動(dòng)化需求。
2023-04-17 16:36:37
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計(jì)、輕巧、高精度的協(xié)作機(jī)器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性?xún)r(jià)比更高,為您解決機(jī)器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-19 14:54:26
本文提出了新穎的機(jī)器人末端臂軌跡跟蹤自適應(yīng)控制方法。該方法與已有的神經(jīng)網(wǎng)絡(luò)模型不同之處在于數(shù)據(jù)首先利用運(yùn)動(dòng)學(xué)反解求出機(jī)器人各關(guān)節(jié)旋轉(zhuǎn)的角度,然后應(yīng)用徑向基函數(shù)
2010-03-03 15:06:5117 針對(duì)無(wú)土栽培溫室類(lèi)結(jié)構(gòu)化環(huán)境下機(jī)器人的全局定位問(wèn)題,采用激光測(cè)距儀感知環(huán)境特征,提出了一種以自適應(yīng)曲率計(jì)算方法進(jìn)行環(huán)境特征分割的移動(dòng)機(jī)器人MonteCar
2010-10-18 16:09:0134 機(jī)器人,適用于物料搬運(yùn)、點(diǎn)焊、弧焊、切割、裝配、測(cè)試、檢測(cè)、涂膠、研磨和拋光等多種應(yīng)用。這些機(jī)器人具有靈活的工作范圍和強(qiáng)大的負(fù)載能力,能夠適應(yīng)各種復(fù)雜的生產(chǎn)環(huán)境。?協(xié)
2024-09-30 17:56:07
控制方案實(shí)現(xiàn)高效自動(dòng)化作業(yè)。機(jī)器人機(jī)械臂末端可定制末端夾具,車(chē)身可定制物料緩存架。技術(shù)優(yōu)勢(shì)經(jīng)世智能復(fù)合機(jī)器人產(chǎn)品使用了自主研發(fā)的復(fù)合機(jī)器人一體化控制系統(tǒng)和復(fù)合機(jī)器人
2025-08-13 10:06:22
為自適應(yīng)機(jī)器人焊接開(kāi)發(fā)WiseWELDING機(jī)器視覺(jué)系統(tǒng)
TIG/GTAW在焊接節(jié)點(diǎn)開(kāi)始的結(jié)果
作者:Robert Modic, M.
2010-03-11 11:27:35996 基于ELM的機(jī)器人自適應(yīng)跟蹤控制_李軍
2017-01-08 11:37:440 地形自適應(yīng)救援機(jī)器人設(shè)計(jì)_張智攀
2017-01-18 20:24:573 自治水下機(jī)器人自適應(yīng)滑膜控制_吳寶舉
2017-01-30 23:17:316 機(jī)器人在現(xiàn)代 的工 業(yè)生產(chǎn) 中獲得 了廣泛 的應(yīng)用 。但 其研究 與應(yīng)用 目前仍 面 臨諸多 難題 ,如 : (1)在動(dòng)態(tài)的 、非結(jié)構(gòu)化 的環(huán)境 中,現(xiàn)有 的機(jī)器人 對(duì)環(huán)境 的適應(yīng)能力有限 ; (2
2017-09-21 14:27:232 針對(duì)目前我國(guó)快遞及外賣(mài)等行業(yè)最后一公里投送困難及投送無(wú)電梯造成的送貨慢、送貨難、物品丟失損傷等問(wèn)題,將新型自適應(yīng)履帶機(jī)器人技術(shù)應(yīng)用到快遞及外賣(mài)中,運(yùn)用三維建模軟件建立了機(jī)器人的參數(shù)化模型后,提出了以
2018-01-22 15:32:453 進(jìn)行交互作業(yè)的能力,而且這類(lèi)軟體機(jī)器人一般具有充分的柔順性、適應(yīng)性、超冗余或無(wú)限自由度,甚至可以任意改變自身形狀和尺寸以適應(yīng)環(huán)境和目標(biāo)。 針對(duì)軟體機(jī)器人結(jié)構(gòu)化分析困難的問(wèn)題,對(duì)軟體機(jī)器人氣腔耦合結(jié)構(gòu)、嵌入式加
2018-03-07 15:21:050 針對(duì)管道機(jī)器人過(guò)彎時(shí)驅(qū)動(dòng)輪與管壁間的相對(duì)滑動(dòng)問(wèn)題以及機(jī)體對(duì)管徑尺寸的適應(yīng)問(wèn)題,設(shè)計(jì)了采用單電機(jī)進(jìn)行驅(qū)動(dòng)并具有自主差動(dòng)特性和自適應(yīng)變徑特性的管道機(jī)器人。分析了機(jī)體差動(dòng)機(jī)構(gòu)的傳動(dòng)特性,從理論上推導(dǎo)了管道
2018-03-27 13:59:172 美國(guó)科研人員正在利用人工智能幫助水下機(jī)器人適應(yīng)各種極端環(huán)境,以完成勘察水中建筑安全狀況的任務(wù)。
2018-07-28 09:46:444054 目前工業(yè)機(jī)器人僅能在嚴(yán)格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動(dòng)作,缺乏對(duì)環(huán)境的感知與應(yīng)變能力,這極大地限制了機(jī)器人的應(yīng)用。利用機(jī)器人的視覺(jué)控制,不需要預(yù)先對(duì)工業(yè)機(jī)器人的運(yùn)動(dòng)軌跡進(jìn)行示教或離線(xiàn)編程,可節(jié)約大量的編程時(shí)間,提高生產(chǎn)效率和加工質(zhì)量。
2018-10-08 14:18:005180 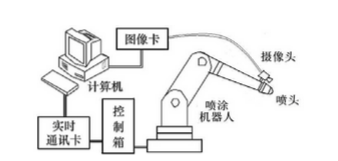
應(yīng)用自適應(yīng)機(jī)械臂能夠帶來(lái)簡(jiǎn)化安裝調(diào)試流程、減少停產(chǎn)時(shí)間、降低人力成本、精簡(jiǎn)生產(chǎn)線(xiàn)、去除冗余的額外設(shè)備等優(yōu)勢(shì),從而為企業(yè)產(chǎn)生可觀的價(jià)值。與傳統(tǒng)機(jī)器人方案相比,自適應(yīng)機(jī)器人方案擁有高品質(zhì)下極高的性?xún)r(jià)比。
2019-04-12 13:30:597430 Rizon是世界上第一個(gè)自適應(yīng)機(jī)器人,結(jié)合了前沿的力覺(jué)控制及AI技術(shù),為最終在制造業(yè)、醫(yī)療、零售等多個(gè)領(lǐng)域通過(guò)機(jī)器人完成復(fù)雜工作任務(wù)而奠定重要基礎(chǔ)。
2019-04-17 10:53:434721 利用人工智能幫助水下機(jī)器人適應(yīng)各種極端環(huán)境,以完成勘察水中建筑安全狀況的任務(wù)。
2019-07-11 15:52:181351 工業(yè)機(jī)器人在工作時(shí)看似簡(jiǎn)單的操作,其實(shí)是有很多的技術(shù)在里面起到了作用。今天我們就來(lái)了解一下,工業(yè)機(jī)器人的應(yīng)用技術(shù)之一——自適應(yīng)運(yùn)動(dòng)控制技術(shù)。
2019-10-02 10:20:001767 根據(jù)結(jié)構(gòu)化道路環(huán)境的特點(diǎn)提出了一種將邊沿檢測(cè)和道路環(huán)境知識(shí)相結(jié)合的機(jī)器視覺(jué)算法并結(jié)合基于行為響應(yīng)的路徑規(guī)劃方法和智能預(yù)瞄控制方法實(shí)現(xiàn)了一套基本的機(jī)器人視覺(jué)導(dǎo)航系統(tǒng)。在自主機(jī)器人實(shí)驗(yàn)平臺(tái)ATRV2上的實(shí)驗(yàn)結(jié)果表明,該視覺(jué)導(dǎo)航系統(tǒng)能夠?qū)崟r(shí)理解結(jié)構(gòu)化道路環(huán)境,并且能夠控制機(jī)器人沿著合理路徑行駛。
2020-07-06 14:54:5823 機(jī)器視覺(jué)檢測(cè)非結(jié)構(gòu)化道路邊緣的難點(diǎn)在于路面像素與非路面像素特征差異復(fù)雜。使用支持向量機(jī)分類(lèi)算法實(shí)現(xiàn)了非結(jié)構(gòu)化道路的邊緣檢測(cè)。算法引入感興趣區(qū)域來(lái)消除環(huán)境噪聲,并通過(guò)交叉驗(yàn)證方法優(yōu)化了算法參數(shù)。最后在支持向量機(jī)的分類(lèi)結(jié)果上使用霍夫變換提取道路邊緣。 Matlab實(shí)驗(yàn)證明算法具有很好的準(zhǔn)確性和魯棒性。
2020-08-27 14:30:005 Clear Venture的創(chuàng)始人兼管理合伙人克里斯·魯斯特(Chris Rust)說(shuō):“非結(jié)構(gòu)化數(shù)據(jù)現(xiàn)在是該行業(yè)的主要威脅面,因?yàn)樗叨确稚⒉⑶乙?b class="flag-6" style="color: red">各種形式出現(xiàn),并且很難保護(hù)關(guān)鍵業(yè)務(wù)內(nèi)容。”
2020-09-10 10:15:342682 11月17日,F(xiàn)lexiv非夕首批百臺(tái)自適應(yīng)機(jī)器人在華南制造中心順利投產(chǎn)下線(xiàn),自適應(yīng)機(jī)器人正式邁入規(guī)模化量產(chǎn)階段。同期,以新生拂曉非夕智造為主題的非夕華南制造中心百臺(tái)自適應(yīng)機(jī)器人投產(chǎn)下線(xiàn)儀式暨力
2020-11-17 16:36:282510 非夕科技CEO王世全表示:“從幾年前第一臺(tái)自適應(yīng)機(jī)器人樣機(jī)在美國(guó)實(shí)驗(yàn)室組裝完成,到今天第100臺(tái)機(jī)器人在佛山投產(chǎn)下線(xiàn),非夕經(jīng)歷了無(wú)數(shù)次技術(shù)突破,這是一條充滿(mǎn)艱辛、也充滿(mǎn)了成就感的創(chuàng)新之路。”
2020-11-24 16:33:052438 ? 12月22日,在2020高工機(jī)器人高工移動(dòng)機(jī)器人年會(huì)技術(shù)向新專(zhuān)場(chǎng)上,F(xiàn)lexiv非夕科技市場(chǎng)總監(jiān)高云帆以《自適應(yīng)機(jī)器人助力下一代工業(yè)自動(dòng)化》為主題發(fā)表了演講。 高云帆首先從工業(yè)自動(dòng)化的現(xiàn)狀展開(kāi)
2021-01-07 09:37:052493 “自適應(yīng)機(jī)器人與傳統(tǒng)工業(yè)機(jī)器人形成的是一種互補(bǔ)性的技術(shù)路線(xiàn),在精密裝配、拋光打磨等環(huán)節(jié)可發(fā)揮其擬人化的優(yōu)勢(shì),從而提升機(jī)器人在不確定性環(huán)境下的適應(yīng)能力。”非夕科技CEO王世全表示。
2021-04-01 11:47:173150 為了讓機(jī)器人更好地與其周?chē)氖挛镞M(jìn)行互動(dòng),并靈活地移動(dòng),機(jī)器人必須能夠看到并辨別其周?chē)?b class="flag-6" style="color: red">環(huán)境。經(jīng)濟(jì)高效且功能強(qiáng)大的視覺(jué)處理器(通過(guò)深度辨別圖像傳感器進(jìn)行數(shù)據(jù)傳輸,并采用極具魯棒性的軟件算法)正在使人們盼望已久的自適應(yīng)機(jī)器人成為現(xiàn)實(shí)。
2021-04-13 15:18:262503 
一種自適應(yīng)網(wǎng)頁(yè)結(jié)構(gòu)化信息提取方法介紹說(shuō)明。
2021-05-08 10:58:072 針對(duì)復(fù)雜環(huán)境下移動(dòng)機(jī)器人自主導(dǎo)航易被困、路徑規(guī)劃不理想等問(wèn)題。首先,通過(guò)改進(jìn)機(jī)器人操作系統(tǒng)(robo‘φperating syste,ROS)中代價(jià)地圖代價(jià)值衰減函數(shù)和七宮格檢測(cè)法,研究了代價(jià)地圖
2021-06-01 11:08:086 Pixie 旨在幫助開(kāi)發(fā)者快速了解并調(diào)試產(chǎn)品系統(tǒng)。為了實(shí)現(xiàn)這一目標(biāo),我們將提供支持,幫助開(kāi)發(fā)者輕松訪(fǎng)問(wèn)其生產(chǎn)系統(tǒng)中的一系列指標(biāo)和日志數(shù)據(jù)。如,幫助收集系統(tǒng)中各個(gè)進(jìn)程的 CPU 和內(nèi)存用量的結(jié)構(gòu)化數(shù)據(jù)
2021-08-10 17:37:313553 隨著機(jī)器人能夠適應(yīng)不斷改變的環(huán)境,它們的價(jià)值和潛在影響也在迅速攀升。
2021-08-20 14:19:451961 自動(dòng)化可重復(fù)的工作、自主做出復(fù)雜決定,機(jī)器人正借由效率的提升持續(xù)改變著未來(lái)工作模式。機(jī)器人適應(yīng)環(huán)境變化的能力越強(qiáng),其所能提供的價(jià)值就越大。
2022-08-02 15:36:131056 項(xiàng)目,從感知到控制、從定位到構(gòu)圖、從導(dǎo)航到可視化,都使用ROS作為基礎(chǔ)。 而不久前AMD XILINX推出了以ROS2為中心的增強(qiáng)機(jī)器人自適應(yīng)計(jì)算能力的硬件加速方法——Kria Robotics Stack(KRS),通過(guò)硬件加速為機(jī)器人帶來(lái)自適應(yīng)計(jì)算能力。 從ROS到ROS
2022-12-12 07:10:061561 機(jī)器人程序的結(jié)構(gòu)是體現(xiàn)其使用價(jià)值的一個(gè)十分重要的因數(shù)。程序結(jié)構(gòu)化越規(guī)范,程序就越易于理解、執(zhí)行效果越好、越便于讀取、越經(jīng)濟(jì)。為了使程序得到結(jié)構(gòu)化設(shè)計(jì),可以使用以下技巧
2023-05-10 11:45:472109 
以深度融合了工業(yè)級(jí)力控技術(shù)、機(jī)器視覺(jué)和先進(jìn)AI的自適應(yīng)機(jī)器人為基礎(chǔ),非夕從機(jī)器人所需的底層能力出發(fā),探索解決打磨自動(dòng)化難點(diǎn)、滿(mǎn)足多樣打磨需求的通用“武器”。
2023-06-08 15:41:481035 
四驅(qū)消防機(jī)器人的出現(xiàn)解決了許多傳統(tǒng)滅火方法所面臨的困難和限制。首先,四驅(qū)消防機(jī)器人擁有出色的機(jī)動(dòng)能力,能夠輕松應(yīng)對(duì)各種復(fù)雜的地形和環(huán)境。
2023-06-14 09:40:101374 本文介紹機(jī)器人激光跟蹤自適應(yīng)焊接技術(shù),激光跟蹤自適應(yīng)擺動(dòng)焊接不但可以用于實(shí)時(shí)跟蹤焊縫,避免焊偏,還能根據(jù)母材之間的間隙大小自動(dòng)變換焊接參數(shù),從而使焊縫始終能獲得相等的焊縫高度。激光跟蹤機(jī)器人自適應(yīng)
2022-02-14 17:15:421747 
電子發(fā)燒友網(wǎng)站提供《機(jī)器人中的自適應(yīng)計(jì)算.pdf》資料免費(fèi)下載
2023-09-14 09:49:050 特種機(jī)器人工作環(huán)境的多樣性和復(fù)雜性,它不可能像工業(yè)領(lǐng)域的機(jī)器人那樣總是具有良好結(jié)構(gòu)化的或抑制的環(huán)境,其使用環(huán)境的有關(guān)信息往往是多義、不完全或不準(zhǔn)確的,而且可能隨著時(shí)間改變。
2023-12-19 10:09:531104 
(曾用名Autogrid),非常適合帶有幾何形狀葉片的渦輪機(jī)械應(yīng)用。01結(jié)構(gòu)化or非結(jié)構(gòu)化網(wǎng)格選擇,兩難境地?隨著幾何形狀的復(fù)雜性不斷增加(現(xiàn)在通常有超過(guò)10k個(gè)曲面
2023-12-23 08:12:374119 
在執(zhí)行探索非結(jié)構(gòu)化環(huán)境等任務(wù)時(shí),傳統(tǒng)機(jī)器人可能會(huì)被無(wú)法跨越的縫隙等障礙物所阻礙。這正是 FiloBot 的優(yōu)勢(shì)所在,因?yàn)樗梢韵褡粤⑻俾粯由L(zhǎng)。
2024-01-23 10:17:101937 
實(shí)驗(yàn)名稱(chēng): 磁場(chǎng)激勵(lì)下對(duì)狹窄非結(jié)構(gòu)化液體環(huán)境的卓越環(huán)境適應(yīng)性和出色的3D可控性驗(yàn)證 研究方向: 在臨床實(shí)踐中,天然孔口通常為醫(yī)療器械提供對(duì)各種靶組織的侵入性通路。這些體腔/腔(例如泌尿和消化系統(tǒng)
2025-11-25 10:04:59162 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論