電子發(fā)燒友網(wǎng)>接口/總線/驅(qū)動(dòng)>
接口/總線/驅(qū)動(dòng)
權(quán)威的接口/總線/驅(qū)動(dòng)技術(shù)專欄,內(nèi)容有接口/總線/驅(qū)動(dòng)培圳資料以及應(yīng)用知識(shí)等;涉及接口/總線/驅(qū)動(dòng)的芯片、技術(shù)、設(shè)計(jì)方法和應(yīng)用文章。
將DS1868 3線器件連接至SPI總線
DS1868采用雙通道數(shù)字電位器,具有3線(移位寄存器)接口。本應(yīng)用筆記描述了將DS1868以及達(dá)拉斯半導(dǎo)體的3線器件連接至摩托羅拉SPI總線所需的邏輯和固件。...
LVDS分路器簡(jiǎn)化了高速信號(hào)分配
ANSI EIA/TIA-644 低壓差分信號(hào) (LVDS) 標(biāo)準(zhǔn)比更傳統(tǒng)的 ECL、PECL 和 CML 標(biāo)準(zhǔn)提供更低的功率和更低的噪聲發(fā)射,用于高速信號(hào)分配。本應(yīng)用筆記比較了這些通信標(biāo)準(zhǔn)的一些特性,并討論了LVDS標(biāo)準(zhǔn)的...
使用低壓差分信號(hào)LVDS進(jìn)行高速信號(hào)分配
時(shí)鐘分配在數(shù)字系統(tǒng)中非常重要,因?yàn)閿?shù)字系統(tǒng)需要不同的子系統(tǒng)使用相同的時(shí)鐘參考。例如,在大多數(shù)情況下,基站的DSP部分必須與射頻信號(hào)處理部分同步,鎖相環(huán)(PLL)產(chǎn)生所需的本地振蕩...
SPI通信的四種方式 FPGA的SPI從機(jī)實(shí)現(xiàn)方案
SPI通信有四種方式,由CPOL(時(shí)鐘極性)、CPHA(時(shí)鐘相位)的4種組合決定的。CPOL決定總線空閑時(shí),SCK是高電平還是低電平(CPOL=,0,無(wú)數(shù)據(jù)傳輸時(shí),SCK=0;CPOL=1,無(wú)數(shù)據(jù)傳輸時(shí),SCK=1)。...
2023-03-29 標(biāo)簽:FPGASPI移位寄存器SPI總線狀態(tài)機(jī) 7053
副邊60W電源管理芯片U6201介紹
副邊60W電源管理芯片U6201是一款采用電流模式控制的反激電源 PWM控制器,適用于電機(jī)驅(qū)動(dòng)電源、適配器和充電器等場(chǎng)合。...
2023-03-29 標(biāo)簽:適配器PWM控制器驅(qū)動(dòng)電源電源管理芯片 3548
開(kāi)源人機(jī)界面HMI軟件可行嗎?
開(kāi)源HMI軟件可以大大縮短開(kāi)發(fā)時(shí)間,但需要企業(yè)內(nèi)部具有專業(yè)技術(shù)人員,可以在未來(lái)進(jìn)行修改或修復(fù)。...
2023-03-29 標(biāo)簽:plc人機(jī)界面HMIjavascript 1101
為何要選擇比DPHY復(fù)雜多的物理層CPHY呢?
MIPI是移動(dòng)領(lǐng)域最主流的視頻傳輸接口規(guī)范,目前應(yīng)用最廣泛的是MIPI DPHY和MIPI CPHY兩組協(xié)議簇...
永磁同步電機(jī)維系統(tǒng)模型的快速準(zhǔn)確高效創(chuàng)建方法
當(dāng)我們需要將設(shè)備集成到生活環(huán)境中,并通過(guò)物聯(lián)網(wǎng)(IoT)控制它們時(shí),由于電力的可用性、高效率和功率密度,電驅(qū)動(dòng)成為自然的選擇。...
2023-03-29 標(biāo)簽:控制器永磁同步電機(jī)物聯(lián)網(wǎng)驅(qū)動(dòng)系統(tǒng)IOT 1644
網(wǎng)絡(luò)關(guān)閉但ECU沒(méi)有休眠前如何進(jìn)行網(wǎng)絡(luò)喚醒呢?
最近在做CAN網(wǎng)絡(luò)管理的工作,發(fā)現(xiàn)網(wǎng)絡(luò)休眠(關(guān)閉)后在ECU系統(tǒng)沒(méi)有休眠/下電前如果又收到了NM報(bào)文,ECU的網(wǎng)絡(luò)沒(méi)有被重新喚醒(開(kāi)啟)...
2023-03-29 標(biāo)簽:收發(fā)器AUTOSARecuCAN網(wǎng)絡(luò) 4449
RS485接口電路如何設(shè)計(jì)你可知道?
做過(guò)EMC檢測(cè)的朋友都應(yīng)該知道,EMC主要是對(duì)電路有要求(當(dāng)然,軟件也要考慮一些地方)。我之前一家公司是做醫(yī)療器械的,產(chǎn)品各項(xiàng)功能基本沒(méi)啥問(wèn)題,但拿到檢測(cè)中心去做EMC檢測(cè),各項(xiàng)指標(biāo)...
2023-03-29 標(biāo)簽:接口電路pcb電路設(shè)計(jì)RS485emc 2716
LVDS發(fā)送芯片之輸入與輸出信號(hào)
這種接口電路中,采用單路方式傳輸,每個(gè)基色信號(hào)采用6位數(shù)據(jù),共18位RGB數(shù)據(jù),因此,也稱18位或18bit LVDS接口。此,也稱18位或18bit LVDS接口。...
RS-485網(wǎng)絡(luò)正確接線指南
本應(yīng)用筆記提供了RS-485網(wǎng)絡(luò)布線的基本指南。RS-485規(guī)范(正式名稱為T(mén)IA/EIA-485-A)沒(méi)有具體說(shuō)明RS-485網(wǎng)絡(luò)應(yīng)如何布線。盡管如此,該規(guī)范確實(shí)提供了一些指導(dǎo)方針。這些準(zhǔn)則和健全的工程實(shí)踐是...
2023-03-28 標(biāo)簽:驅(qū)動(dòng)器發(fā)射器RS-485 27192
RS-485差分?jǐn)?shù)據(jù)傳輸系統(tǒng)基礎(chǔ)知識(shí)
RS-485和RS-422標(biāo)準(zhǔn)具有許多相同的屬性,因此經(jīng)常被混淆。下表比較了不同的標(biāo)準(zhǔn)。RS-485規(guī)定了雙向和半雙工數(shù)據(jù)傳輸,是唯一允許在“總線”配置中使用多個(gè)接收器和驅(qū)動(dòng)器的EIA/TIA標(biāo)準(zhǔn)。相反...
2023-03-28 標(biāo)簽:驅(qū)動(dòng)器接收器總線 2915
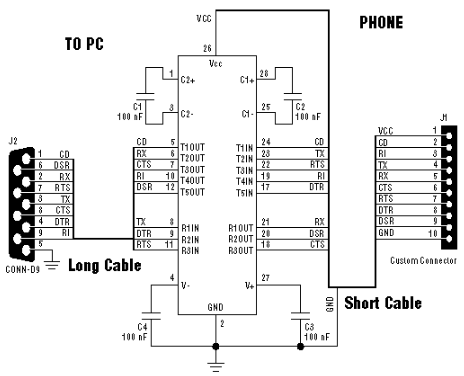
數(shù)據(jù)塊電纜的設(shè)計(jì)注意事項(xiàng)
隨著移動(dòng)通信需求的增加,使用數(shù)據(jù)線連接手機(jī)和其他移動(dòng)設(shè)備將變得更加普遍。新的、數(shù)據(jù)速率更快的手機(jī)標(biāo)準(zhǔn),如GPRS、WCDMA和UMTS,將需要數(shù)據(jù)線來(lái)實(shí)現(xiàn)下一代智能手機(jī)固有的更高水平的功...
SPI外設(shè)與MAX7651處理器的接口
The SPI?總線是許多微處理器外設(shè)芯片使用的4線串行通信接口。MAX7651微處理器不包括實(shí)現(xiàn)接口的專用硬件。但是,圖中顯示了可以向SPI外設(shè)發(fā)送和接收數(shù)據(jù)的簡(jiǎn)單軟件例程。...
RS-232串行通信基礎(chǔ)知識(shí)
由于其相對(duì)簡(jiǎn)單和低硬件開(kāi)銷(與并行接口相比),串行通信在電子行業(yè)中被廣泛使用。今天,最流行的串行通信標(biāo)準(zhǔn)當(dāng)然是EIA/TIA-232-E規(guī)范。該標(biāo)準(zhǔn)由電子工業(yè)協(xié)會(huì)和電信工業(yè)協(xié)會(huì)(EIA/TIA)制...
2023-03-28 標(biāo)簽:驅(qū)動(dòng)器接收器RS-232 9605
調(diào)整RS-485系統(tǒng)所需功率的方法
本文介紹了RS-485數(shù)據(jù)通信系統(tǒng)中的節(jié)能方法。方法包括低功耗收發(fā)器集成電路(IC)、內(nèi)置故障安全閾值的IC(允許消除電纜故障安全電阻)、使用CMOS而不是TTL驅(qū)動(dòng)器、在不傳輸時(shí)采用驅(qū)動(dòng)器禁...
2023-03-28 標(biāo)簽:集成電路收發(fā)器驅(qū)動(dòng)器 3603
為您的電源電壓選擇和使用RS-232接口器件
針對(duì)采用各種電源工作的RS-232接口描述了設(shè)備和電路。系統(tǒng)采用傳統(tǒng)的+5/12/-12V、+5/+12V、僅+5V、僅+3V至+5.5V、僅+2.7V至+3.6V和+1.8V至+4.25電池供電。...
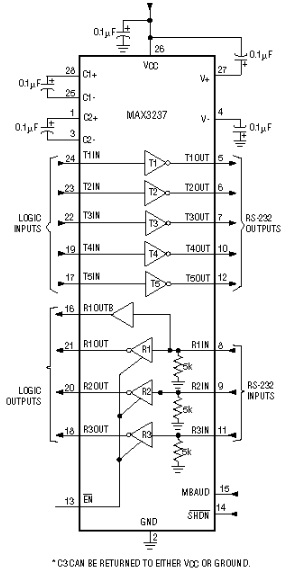
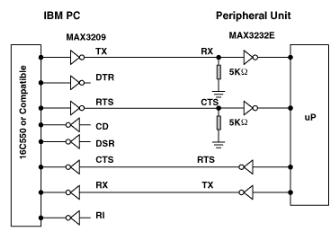
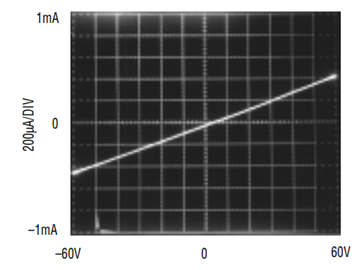
RS-232特性說(shuō)明
RS-232特性的解釋方式使選擇合適的RS-232通信IC以滿足任何系統(tǒng)需求的方式變得容易。特別注意信號(hào)擺幅、壓擺率、增強(qiáng)型ESD保護(hù)以及高達(dá)1Mbaud的數(shù)據(jù)速率。引入了RS-232兼容與RS-232兼容的概念,其...
選擇和使用RS-232、RS-422和RS-485串行數(shù)據(jù)標(biāo)準(zhǔn)的指南
三種常見(jiàn)的串行數(shù)據(jù)標(biāo)準(zhǔn)RS-232、RS-422和RS-485按規(guī)格和電氣接口進(jìn)行描述。介紹了電纜端接技術(shù)、多個(gè)負(fù)載的使用、RS-232 的菊花鏈連接、RS-232 到 RS-485 的轉(zhuǎn)換、RS-485 到 RS-232 的轉(zhuǎn)換以及 RS-232 端口...
2023-03-28 標(biāo)簽:驅(qū)動(dòng)器接口調(diào)制解調(diào)器 5121
一文帶你讀懂UART、TTL、RS232、RS422、RS485、CAN、USB
奇偶校驗(yàn)位:用于接收方對(duì)接收到的數(shù)據(jù)進(jìn)行校驗(yàn),校驗(yàn)“1” 的位數(shù)為偶數(shù)(偶校驗(yàn)) 或奇數(shù)(奇校驗(yàn)),以此來(lái)校驗(yàn)數(shù)據(jù)傳送的正確性,使用時(shí)不需要此位也可以。...
Maxim RS-485特性說(shuō)明
在RS-485系統(tǒng)設(shè)計(jì)過(guò)程中的某個(gè)時(shí)間,會(huì)確定適合該系統(tǒng)的最大數(shù)據(jù)速率。然后有必要選擇能夠以這種速度運(yùn)行的物理RS-485設(shè)備。選擇額定速度等于或大于所需數(shù)據(jù)速率的設(shè)備。知道了這一點(diǎn),您...
2023-03-28 標(biāo)簽:驅(qū)動(dòng)器接收器RS-485 2963
LT1785和LT1791解決問(wèn)題RS485接口中的故障
具有 ±1785V 故障的 LT1791 和 LT485 RS422 / RS60 收發(fā)器 寬容解決現(xiàn)實(shí)世界的問(wèn)題 RS485接口中的現(xiàn)場(chǎng)故障 電路。RS485 和 RS422 數(shù)據(jù)網(wǎng)絡(luò) 用于各種 數(shù)據(jù)通信應(yīng)用。 調(diào)制解調(diào)器和其他計(jì)算機(jī)外圍設(shè)備 使用...
串行數(shù)據(jù)接口芯片提供雙極性電壓
目前可用于串行數(shù)據(jù)傳輸?shù)囊恍┙涌贗C不僅在低V下工作抄送電平(5V 或 3.3V);它們還產(chǎn)生雙極性直流電壓(±6.5V 至 ±10V),以支持 EIA/TIA-232 規(guī)定的最小驅(qū)動(dòng)器輸出電平。小心翼翼地,您可以從...
2023-03-28 標(biāo)簽:電源驅(qū)動(dòng)器發(fā)送器 1316
長(zhǎng)光辰芯推出小面陣全局快門(mén)CMOS圖像傳感器
GMAX4002高速版采用先進(jìn)的4um電荷域全局快門(mén)像素以及1/1.7″光學(xué)尺寸,有效分辨率為2048(H) x 1200(V)。...
2023-03-28 標(biāo)簽:CMOS圖像傳感器機(jī)器視覺(jué)lvds接口CMOSlvds接口圖像傳感器機(jī)器視覺(jué)長(zhǎng)光辰芯 2611
為什么SoC驗(yàn)證一定需要FPGA原型驗(yàn)證呢??
在現(xiàn)代SoC芯片驗(yàn)證過(guò)程中,不可避免的都會(huì)使用FPGA原型驗(yàn)證,或許原型驗(yàn)證一詞對(duì)你而言非常新鮮,但是FPGA上板驗(yàn)證應(yīng)該是非常熟悉的場(chǎng)景了。...















編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語(yǔ)言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無(wú)刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺(jué) | 無(wú)人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國(guó)民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹(shù)莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)