,由于沒有用于分析PPG信號的可靠檢測算法,醫(yī)療市場一直無法使用PRV提供臨床診斷,也無法測量健康方面的生物信息,如睡眠階段、壓力狀態(tài)和疲勞狀況等。 本文提供一種可靠的峰值和起始點檢測算法,可以
2021-01-28 06:02:27
一種可靠的峰值和起始點檢測算法,該算法使用最初被提議用于動脈血壓(ABP)波形的描繪方法。
2019-07-30 06:05:32
YSQ(于仕琪)人臉檢測介紹:YSQ人臉檢測算法實現(xiàn)快速從視頻幀中檢測人臉并提取關(guān)鍵信息,支持多視角檢測,每個人臉提取68個關(guān)鍵點(Landmark)坐標(biāo)。算法使用標(biāo)準(zhǔn)C/C++實現(xiàn),無任何第三方庫或工具依賴。具有以下特點
2019-07-29 06:49:25
本帖最后由 壁虎大叔 于 2016-6-4 17:52 編輯
用MATLAB編程,實現(xiàn)Harris角點檢測,利用角點判斷幾何圖形是什么形狀(最好有程序說明),萬分感謝!
2016-06-04 17:39:04
檢測系統(tǒng)在低功耗、輕小型化等方面提出了更高的要求。因此,完成小目標(biāo)檢測任務(wù)不僅需要尋求合理的小目標(biāo)檢測算法,在實現(xiàn)時還需要考慮處理性能和體積功耗。
2019-08-09 07:07:03
labview中角點檢測的函數(shù)嗎
2017-05-24 09:52:35
《OpenCV3編程入門》學(xué)習(xí)筆記10 角點檢測(二)Shi-Tomasi角點檢測
2020-05-25 14:58:13
` 本帖最后由 windworld 于 2016-9-14 14:34 編輯
在利用DragonBoard 410c來實現(xiàn)圖像角點檢測前,先要了解下什么事角點檢測。“如果某一點在任意方向的一個
2016-09-13 19:46:09
經(jīng)驗。特申請此開發(fā)板,優(yōu)化系統(tǒng)性能,提高檢測速度。項目描述:第一代坯布疵點檢測算法已經(jīng)在工控機實現(xiàn)并設(shè)計成品在產(chǎn)線上進(jìn)行實驗。為了進(jìn)一步優(yōu)化疵點檢測系統(tǒng)的檢測速度。目前想通過相機+FPGA+DSP
2015-10-09 15:09:57
最近幾年的人臉檢測算法和一種新的快速算法,與大家探討特征、弱分類器、收斂準(zhǔn)則、樣本選擇等對人臉檢測性能的影響,并嘗試分析人臉姿態(tài)、表情、遮擋、年齡、種族等影響因素。2013年全國圖像圖形處理技術(shù)應(yīng)用大會
2013-09-26 15:13:24
目前優(yōu)化了一款高速人臉檢測算法,在 ARM設(shè)備的A73單核CPU(圖像大小:860*540最小人臉大小:60*60)速度可以高達(dá)10-15ms每幀,真正的實時人臉檢測算法,算法準(zhǔn)確率在 FDDB數(shù)據(jù)
2021-12-15 07:01:06
最近想試驗一下在單片機上能不能將車道線檢測算法跑起來,也作為一個了解單片機和用C語言手?jǐn)]圖像處理算法的學(xué)習(xí)機會。這一系列文章將從單片機、RTOS(RT-Thread)、外設(shè)(攝像頭、LCD顯示屏
2021-07-15 09:35:36
有沒有用verilog語言寫的基于FPGA的圖像角點檢測代碼呀?
2012-04-10 10:47:39
系統(tǒng)的關(guān)鍵任務(wù)之一,其主要的功能是檢測前方道路上出現(xiàn)的目標(biāo)的空間位置和目標(biāo)類別。傳統(tǒng)目標(biāo)檢測算法依賴于手工設(shè)計好的特征來對目標(biāo)進(jìn)行特征提取,以實現(xiàn)分類和檢測的目的,常見的目標(biāo)特征包括 Scale
2023-03-06 13:55:27
harris角點檢測的公式,大部分資料都是直接給出公式R=detM-(traceM)2,請問你能給出推導(dǎo)過程嗎
2022-08-30 17:37:07
什么是同步檢測算法?如何去實現(xiàn)相位模糊估計的幀同步檢測算法?
2021-05-06 07:23:16
本文提出了可對手腕PPG信號實施PRV分析的可靠峰值和起始點檢測算法。
2021-06-17 09:25:04
。Wallg和Braday提出了一種基于表面曲率的角點檢測算法。為了改善角點檢測的穩(wěn)定性,首先將圖像和高斯濾波器卷積,然后計算整個圖像的表面曲率,當(dāng)曲率高于一定閾值,并為局部最大值的點被認(rèn)為是候選角點。(2
2016-01-22 13:46:00
兩通道DPCA動目標(biāo)檢測原理是什么?基于機載單通道SAR數(shù)據(jù)的地面運動目標(biāo)檢測算法
2021-06-03 06:04:06
求Matlab圖像自編邊緣檢測算法,多謝了
2013-12-03 20:58:39
邊緣檢測是什么?邊緣檢測算子有哪些?邊緣檢測算法分為哪幾種?它們有何不同?
2021-05-31 06:57:51
送大家一款遠(yuǎn)控更新上線的軟件,暫時免費軟件介紹:牧民遠(yuǎn)控上線通是一款通過ASP管理平臺實施遠(yuǎn)程更新反彈連接的的軟件本程序是參照網(wǎng)絡(luò)上面的相同類型程序進(jìn)行編譯而成.初步測試無任何差錯.上線通下載地址http://www.158166.net/Demo/shangxiantong.rar
2010-02-03 10:33:45
軍事訓(xùn)練領(lǐng)域的特殊性造成其相關(guān)數(shù)據(jù)存在大量的噪聲點,同時也為噪聲檢測算法提出了相應(yīng)的要求。分析現(xiàn)有數(shù)據(jù)噪聲點檢測算法,提出將數(shù)據(jù)屬性分為空間屬性、環(huán)境屬性、特
2009-03-20 14:32:56 4
4 使用形態(tài)學(xué)的思想進(jìn)行圖像的邊緣檢測,提出了在一次形態(tài)處理中使用雙結(jié)構(gòu)元的一系列一般性形態(tài)邊緣檢測算子和抗噪型形態(tài)邊緣檢測算子的算法,并給出算子的性質(zhì)。新算子
2009-04-19 19:26:3332 本文將機器視覺與數(shù)字圖像處理技術(shù)引入到織物疵點檢測中,提出了一種織物疵點檢測算法——圖像距離差算法。該算法可使用戶根據(jù)織物的類型,自行設(shè)置相應(yīng)的疵點檢測
2009-05-27 13:12:3717 探地雷達(dá)回波相鄰道信號具有很大的相似性,本文利用相鄰道信號間的相關(guān)性,改進(jìn)了二次樣條小波模極大值搜索算法,提出了一種基于信號相關(guān)性的奇異點檢測算法,并加以實
2009-06-26 10:28:3528 本文提出了一種基于數(shù)字圖像處理技術(shù)的表面裂紋檢測算法。運用這種算法能精確的檢測裂紋的位置、長度等特征。將這種裂紋檢測算法運用到裂紋自動檢測系統(tǒng)以及裂紋擴(kuò)展行為
2009-08-21 10:37:0636 端點檢測是語音識別中的一項關(guān)鍵技術(shù),端點檢測的準(zhǔn)確性對語音識別的結(jié)果有很大影響。本文提出一種引入自適應(yīng)門限的基于基音頻率的檢測算法,并對文中提及的幾種算法的
2009-12-16 12:34:3219 提出一種新的基于小波變換的Harris 多尺度角點檢測算法,可以在不同的尺度下獲取角點,克服了單一尺度的Harris 角點檢測算法可能存在的角點信息丟失和易受噪聲影響而檢測出
2010-01-09 11:18:2541 一種微分極值的邊緣檢測算法
本文通過對邊緣點的定義,提出了一種微分極值的邊緣檢測算法。與經(jīng)典微分算法相比,該算法直接在邊緣檢測窗口內(nèi)提取邊界像
2010-02-22 15:03:568 邊緣檢測是醫(yī)學(xué)圖像處理中非常重要的一個環(huán)節(jié),通過對幾種經(jīng)典邊緣檢測算法的分析,提出了一種基于Canny算子的改進(jìn)算法。該算法以圖像增強法代替原算法中的高斯濾波,以去除
2010-07-05 16:50:5615 由于實際場景的多樣性,目前常用的運動目標(biāo)檢測算法都還存在一定程度的缺陷,因此本文提出了一種將幀差法和背景減法相結(jié)合的方法,實現(xiàn)快速精確地檢測和提取運動目標(biāo)。實
2010-07-27 16:42:0713 研究了三維空間中的碰撞檢測問題。提出一種基于DirectX的物體三角形碰撞檢測方法,在游戲程序中分析并實現(xiàn)了這種碰撞檢測算法。該算法能以較快的速度解決游戲程序中物體間的碰
2010-11-19 14:58:090 滑坡現(xiàn)象。泥石流山體滑坡監(jiān)控AI視覺識別檢測算法一旦系統(tǒng)識別到災(zāi)害事件的發(fā)生,系統(tǒng)會立即進(jìn)行圖像抓拍,并將相關(guān)信息同步通知后臺值班人員。泥石流山體滑坡監(jiān)控AI視覺識
2024-08-30 19:11:02
裸土覆蓋檢測算法是一種先進(jìn)的圖像識別技術(shù),裸土覆蓋檢測算法通過安裝在現(xiàn)場的監(jiān)控攝像頭自動捕捉視頻或圖像,進(jìn)而識別出裸露土壤區(qū)域。該算法的核心在于利用CNN的強大特征提取能力,對圖像中的裸露土壤進(jìn)行
2024-11-01 21:24:34
摘要! 在實際系統(tǒng)中對游程檢測的實現(xiàn)速度$電路規(guī)模有很高的要求# 而傳統(tǒng)的檢測方法性能 較低% 針對此問題提出了一種新的游程檢測算法% 該算法基于硬件實現(xiàn)#電路結(jié)構(gòu)簡單實現(xiàn)速度
2011-03-31 15:47:0618 本內(nèi)容提供了基于碼本模型的運動目標(biāo)檢測算法
2011-05-19 10:54:0132 本文通過對已有圖像拼接算法的分析研究,改進(jìn)了拼接算法中的特征點匹配問題。首先利用Harris角檢測算法提取特征點,然后通過歸一化相關(guān)法進(jìn)行初始匹配,接著引入馬氏(Mahalanobis
2011-12-29 16:31:3328 為了設(shè)計一種實時高效、穩(wěn)定可靠的圖像目標(biāo)跟蹤系統(tǒng)平臺,避免因圖像邊緣提取效果差而引起跟蹤失敗,采用自適應(yīng)Canny邊緣檢測算法。該自適應(yīng)算法能夠很好的確定平滑參數(shù)以及高
2012-03-05 16:14:1338 針對三維視覺測量中棋盤格標(biāo)定板的角點檢測,給出了基于單應(yīng)性矩陣這一計算機視覺重要工具為基礎(chǔ)的檢測方法。首先通過點選得到待測角點外接四邊形的4個角點坐標(biāo),接著利用單應(yīng)
2012-04-20 10:10:1823 《OpenCV3編程入門》書本配套源代碼:Harris角點檢測
2016-06-06 15:20:544 《OpenCV3編程入門》書本配套源代碼:Shi-Tomasi角點檢測
2016-06-06 15:20:546 《OpenCV3編程入門》書本配套源代碼:亞像素級角點檢測
2016-06-06 15:52:295 點,然后用強分類器進(jìn)行人臉的檢測,進(jìn)一步利用混合投影峰分析檢測人眼的位置。通過C++實現(xiàn)了該算法,完成了人臉檢測算法的DSP程序移植。實驗結(jié)果表明,該DSP系統(tǒng)可以有效的實現(xiàn)人眼檢測。
2016-06-17 16:00:4410 OpenCV3編程入門-源碼例程全集-Harris角點檢測
2016-09-18 16:38:461 一種雙門限語音端點檢測算法的ASIC實現(xiàn)
2017-01-07 20:32:201 Harris角點檢測在列車滑動監(jiān)測系統(tǒng)中的應(yīng)用_潘崢嶸
2017-03-19 11:26:540 在基于先驗信噪比的維納濾波語音增強算法的基礎(chǔ)上,結(jié)合語音端點檢測算法,本文提出一種新算法。新算法在語音端點檢測的基礎(chǔ)上,通過平滑處理更新噪聲信號功率譜以適應(yīng)噪聲不穩(wěn)定的環(huán)境;通過計算有聲段噪聲
2017-11-08 17:28:013 Harris角點檢測算法對眼角點進(jìn)行定位,最后通過瞳孔與眼角點的相互坐標(biāo)定位出人眼瞳孔的精確位置。通過madah對所提算法進(jìn)行檢驗,證明了該算法是一種實現(xiàn)簡單、定位精確的算法。
2017-11-13 15:57:406 提出一種新的基于粒子群優(yōu)化算法的屬性異常檢測算法。該算法利用粒子群優(yōu)化算法簡單、尋優(yōu)速度快的優(yōu)點檢測屬性異常,在粒子群尋找最優(yōu)值的過程中發(fā)現(xiàn)可能是屬性異常的數(shù)據(jù),并采用0-measure適應(yīng)度評估
2017-11-20 09:21:374 已有的密度離群點檢測算法LOF不能適應(yīng)數(shù)據(jù)分布異常情況離群點檢測,INFLO算法雖引入反向五近鄰點集有效地解決了數(shù)據(jù)分布異常情況的離群點檢測問題,但存在需要對所有數(shù)據(jù)點不加區(qū)分地分析其k近鄰和反向k
2017-11-25 09:34:216 accelerated segment test)。很多傳統(tǒng)的算法都很耗時,而且特征點檢測算法只是很多復(fù)雜圖像處理里中的第一步,得不償失。FAST特征點檢測是公認(rèn)的比較快速的特征點檢測方法,只利用周圍像素比較的信息就可以得到特征點,簡單,有效。
2017-11-29 09:10:49 3756
3756 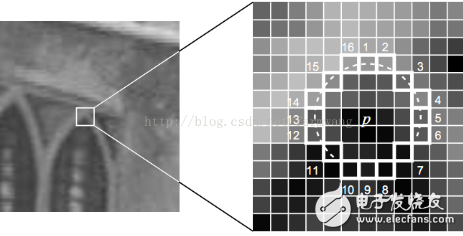
傳統(tǒng)的Canny邊緣檢測算子是一種含有最優(yōu)化思想的算子,它具有較高的檢測精度,可以達(dá)到單像素級,但是因為它本身對噪聲比較敏感,所以需要先利用Gauss濾波、均值濾波、中值濾波等濾波器進(jìn)行去噪,然后再
2017-12-01 14:13:530 Moravec角點檢測算子的思想其實特別簡單,在圖像上取一個W*W的“滑動窗口”,不斷的移動這個窗口并檢測窗口中的像素變化情況E。像素變化情況E可簡單分為以下三種:A 如果在窗口中的圖像是什么平坦
2017-12-04 11:42:0611504 
種改進(jìn)的ViBe算法,以達(dá)到快速消除鬼影的目的,更準(zhǔn)確地完成前景目標(biāo)提取。在道路上設(shè)置固定檢測區(qū)域,根據(jù)運動目標(biāo)在固定檢測區(qū)域的運動軌跡來建立或者消除非固定虛擬線圈,再進(jìn)一步使用虛擬線圈的車流量檢測算法實現(xiàn)車流量統(tǒng)計
2017-12-08 14:56:390 能。在眾多MIMO檢測算法中,線性檢測器由于其較低的實現(xiàn)成本和復(fù)雜度,得到了廣泛使用。然而在大規(guī)模MIMO系統(tǒng)中,線性檢測器中的矩陣求逆操作復(fù)雜度進(jìn)一步提高,大大增加了硬件實現(xiàn)的難度。因此,選擇和設(shè)計適合大規(guī)模MIMO系統(tǒng)的檢測算
2017-12-21 15:26:441 集中性,能解決譜估計存在較大方差的問題。理論推導(dǎo)及仿真結(jié)果證明,基于多窗譜的頻譜檢測算法是一種低方差、高分辨率的頻譜檢測方法,能有效實現(xiàn)低信噪比條件下的信號檢測,且相比于其他檢測算法能達(dá)到更好的檢測性能。
2017-12-27 15:34:030 本文針對現(xiàn)有的ML(Maximum Likelihood)檢測算法復(fù)雜度高,而傳統(tǒng)檢測算法性能不是很優(yōu)的問題,提出了一種新的檢測算法。新的檢測算法結(jié)合ZF-OSIC和ML檢測算法,根據(jù)ZF-OSIC
2017-12-29 14:52:210 (nlog2(n》,算法基于模塊度聚類和圖計算思想,應(yīng)用新的節(jié)點和邊的更新方法,利用平衡二叉樹對模塊度增量建立索引,基于模塊度最優(yōu)的思想設(shè)計一種新的重疊社區(qū)檢測算法.相對于傳統(tǒng)的重疊節(jié)點檢測算法,對每個節(jié)點分析的頻率大為降低,可以在較低的算法運行時間下獲得較高的識別準(zhǔn)確率.復(fù)雜網(wǎng)絡(luò)大數(shù)據(jù)集上的算法測
2018-01-03 11:40:090 傳統(tǒng)基于歐氏距離的異常檢測算法在高維數(shù)據(jù)檢測中存在精度無法保證以及運行時間過長的問題。為此,結(jié)合高維數(shù)據(jù)流的特點運用角度方差的方法,提出一種改進(jìn)的基于角度方差的數(shù)據(jù)流異常檢測算法。通過構(gòu)建最佳數(shù)據(jù)集
2018-01-17 11:29:341 特征提取技術(shù)的原理和實現(xiàn)方法進(jìn)行了簡要闡述的基礎(chǔ)上,分析了模擬電路、DSP和傳統(tǒng)FPGA實現(xiàn)的不足,提出了在ZYNQ平臺上實現(xiàn)該算法的方案。該方案利用了ZYNQ平臺的優(yōu)勢,使用軟硬件協(xié)同設(shè)計和IP集成的設(shè)計思想,實現(xiàn)快速開發(fā)。利
2018-02-02 16:40:093 ,一種線搜索式角點檢測最近剛剛提出,其相比于一些經(jīng)典方法Harris, SUSAN, MIC等在準(zhǔn)確性與快速性方面更為優(yōu)良。然而我們的研究發(fā)現(xiàn),線搜索式角點檢測法全局固定閾值應(yīng)對多變光線條件的能力顯得不足,而且常需要根據(jù)圖像的
2018-03-02 10:49:370 針對 TINY YOLO車輛檢測算法計算量過大,且在小型嵌入式系統(tǒng)中難以達(dá)到實時檢測要求的問題。利用小型Zynq SoC系統(tǒng)的架構(gòu)優(yōu)勢以及TINY Y0LO的網(wǎng)絡(luò)權(quán)值中存在大量接近零的權(quán)值參數(shù)這一
2019-04-26 16:24:002 針對TINYYOLO車輛檢測算法計算量過大,且在小型嵌入式系統(tǒng)中難以達(dá)到實時檢測要求的問題。利用小型Zynq SoC系統(tǒng)的架構(gòu)優(yōu)勢以及TINYYOLO的網(wǎng)絡(luò)權(quán)值中存在大量接近零的權(quán)值參數(shù)這一特點
2019-10-30 14:57:512 本文檔的主要內(nèi)容詳細(xì)介紹的是OpenCV3.1教程之Harris角點檢測的詳細(xì)課件免費下載。包括了:1.Harris角點檢測理論(1998提出)2. 參數(shù)說明3.代碼演示
2020-01-06 08:00:007 本文給出了一種適合于用硬件實現(xiàn)的多通道自相關(guān)信號檢測算法。該算法采用三路并行的自相關(guān)信號檢測通道,在三路中采用不同的相關(guān)點數(shù)和檢測門限,最后綜合考慮三路的檢測結(jié)果,給出最終的檢測結(jié)果。這種多通道自相
2021-03-10 17:13:0048 現(xiàn)有數(shù)據(jù)流離群點檢測算法在面對海量高維數(shù)據(jù)流時普遍存在運算時間過長的問題。為此,提出一種引入局部向量點積密度的高維數(shù)據(jù)流離群點快速檢測算法。以保存少量中間結(jié)果的方式只對窗口內(nèi)受影響的數(shù)據(jù)點進(jìn)行增量
2021-03-17 16:18:1412 為實現(xiàn)復(fù)雜駕駛環(huán)境下駕駛?cè)藛T疲勞狀態(tài)識別與預(yù)警,提出基于深度學(xué)習(xí)的疲勞駕駛檢測算法。利用基于 shuffle- channel思想的 MTCNN模型檢測常規(guī)攝像頭實時采集的駕駛?cè)藛T人臉圖像
2021-03-30 09:17:5525 角點檢測是攝像機校準(zhǔn)的重要環(huán)節(jié),可通過對棋盤圖像進(jìn)行角點檢測來確定攝像機的內(nèi)外參數(shù),然而傳統(tǒng)方法在檢測棋盤角點時保留了較多的冗余信息,難以精確給出棋盤角點位置。為此,提出一種新的棋盤角點檢測方法
2021-03-30 09:44:2911 針對三維模型的特征點檢測問題,提出一種基于 Laplace- Beltrami算子的特征點檢測算法。對于給定的三維網(wǎng)格模型,首先構(gòu)造離散 Laplace- Beltrami算子矩陣,求解特征值
2021-04-21 13:50:4211 整體框架 目標(biāo)檢測算法主要包括:【兩階段】目標(biāo)檢測算法、【多階段】目標(biāo)檢測算法、【單階段】目標(biāo)檢測算法 什么是兩階段目標(biāo)檢測算法,與單階段目標(biāo)檢測有什么區(qū)別? 兩階段目標(biāo)檢測算法因需要進(jìn)行兩階
2021-04-30 10:22:0411401 
為了提高海面特征點檢測的準(zhǔn)確度和三維重建的精度,在基于傳統(tǒng)的μaris算法的基礎(chǔ)上,提岀Ⅰ種基于高斯金字塔圖像的改進(jìn)Hars特征點檢測算法。利用搭建的雙目相機泙臺,對海浪圖像進(jìn)行采集并完成相機的標(biāo)定
2021-05-06 17:03:5618 為提升人體姿態(tài)估計在移動終端設(shè)備上的運行速度與實時性,提出一種改進(jìn)的人體關(guān)鍵點檢測算法。通過將 Mobilenetv2輕量級主干網(wǎng)絡(luò)與深度可分離卷積模塊相結(jié)合加速特征提取過程,使用精煉網(wǎng)絡(luò)進(jìn)行多尺度
2021-05-14 11:26:134 為對結(jié)構(gòu)性數(shù)據(jù)的髙效干擾進(jìn)行檢測,以線性分組碼為研究對象,在經(jīng)典能量檢測算法的噪聲模型中加入惡意干擾信號,推導(dǎo)二元假設(shè)模型中檢驗統(tǒng)計量的數(shù)學(xué)表達(dá)式。在此基礎(chǔ)上,以虛警率與漏檢率之和最小為準(zhǔn)則提出一
2021-05-27 15:15:177 為了監(jiān)管電力市場中存在的各類違規(guī)行為,保證市場的公平竟?fàn)帲釋缌?b class="flag-6" style="color: red">一種基于分階段離群點檢測算法的電力市場異常行為辨識方法。梳理不同交易階段異常行為的特征,提取相應(yīng)的特征指標(biāo),采用主成分分析法對其進(jìn)行降
2021-06-01 10:43:434 為提髙復(fù)雜噪聲環(huán)境下語音信號端點檢測的準(zhǔn)確率,提岀一種基于梅爾頻譜倒譜系數(shù)(MFCC)距離的多維特征語音信號端點檢測算法。通過計算語音信號的MrcC距離,結(jié)合短時能量和短時過零率對特征距離進(jìn)行修正
2021-06-03 16:36:318 研究圖像特征檢測已經(jīng)有一段時間了,圖像特征檢測的方法很多,又加上各種算法的變形,所以難以在短時間內(nèi)全面的了解,只是對主流的特征檢測算法的原理進(jìn)行了學(xué)習(xí)。總體來說,圖像特征可以包括顏色特征、紋理特等
2021-09-01 10:19:192753 
③ 數(shù)據(jù)清理——在訓(xùn)練另一個模型之前從數(shù)據(jù)集中去除異常值。 你可能已經(jīng)注意到,一些不平衡分類的問題也經(jīng)常使用異常檢測算法來解決。例如,垃圾郵件檢測任務(wù)可以被認(rèn)為是一個分類任務(wù)(垃圾郵件比普通電子郵件少得多),但是
2021-10-25 09:15:022203 在計算機視覺領(lǐng)域,我們經(jīng)常需要做一些特殊的任務(wù),而這些任務(wù)中經(jīng)常會用到直線檢測算法,比如車道線檢測、長度測量等。盡管直線檢測的任務(wù)看起來比較簡單,但是在具體的應(yīng)用過程中,你會發(fā)現(xiàn)這里面還是有很大的優(yōu)化空間,本文對常用的一些比較經(jīng)典的直線檢測算法進(jìn)行匯總
2022-11-25 17:25:211926 解開車輛檢測算法之謎
2023-01-05 09:43:382042 
Canny 邊緣檢測算法 是 John F. Canny 于 1986年開發(fā)出來的一個多級邊緣檢測算法,此算法被很多人認(rèn)為是邊緣檢測的最優(yōu)算法,相對其他邊緣檢測算法來說其識別圖像邊緣的準(zhǔn)確度要高很多。
2023-01-05 11:41:192236 掌握基于Transformer的目標(biāo)檢測算法的思路和創(chuàng)新點,一些Transformer論文涉及的新概念比較多,話術(shù)沒有那么通俗易懂,讀完論文仍然不理解算法的細(xì)節(jié)部分。
2023-08-16 10:51:261014 
算法的核心是利用局部窗口在圖像上進(jìn)行移動,判斷灰度是否發(fā)生較大的變化。如果窗口內(nèi)的灰度值(在梯度圖上)都有較大的變化,那么這個窗口所在區(qū)域就存在角點。
2023-09-22 15:46:272417 
電子發(fā)燒友網(wǎng)站提供《基于Delaunay三角剖分的空間離群點檢測算法研究.pdf》資料免費下載
2023-10-07 11:15:490 電子發(fā)燒友網(wǎng)站提供《基于C8051F310的高靈敏車輛檢測算法.pdf》資料免費下載
2023-10-18 11:00:200 電子發(fā)燒友網(wǎng)站提供《一種可靠的峰值和起始點檢測算法.pdf》資料免費下載
2023-11-22 10:27:530 口罩佩戴檢測算法基于YOLOv5在圖像識別檢測領(lǐng)域的優(yōu)異性能,本文研究基于基于YOLOv5的口罩佩自動戴檢測方法。首先從網(wǎng)絡(luò)和真實生活中中尋找并采集不同場景人群口罩佩戴的圖片約500張并自建數(shù)據(jù)集
2024-07-01 20:20:021023 
圖像識別算法: 邊緣檢測 :邊緣檢測是圖像識別中的基本步驟之一,用于識別圖像中的邊緣。常見的邊緣檢測算法有Canny邊緣檢測器、Sobel邊緣檢測器和Laplacian邊緣檢測器。 特征點檢測 :特征點檢測是識別圖像中的關(guān)鍵點,這些關(guān)鍵點在圖像中具有獨特的屬性,如角點、邊緣點等。常見的特征點檢測算
2024-07-16 10:40:182381
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論