DSP與FPGA設(shè)計的跟蹤伺服運動控制技術(shù)
摘 要: 在分析光電跟蹤伺服系統(tǒng)特點的基礎(chǔ)上,以TI公司DSP芯片TMS320F2812作為主控制芯片,采用FPGA進(jìn)行邏
2010-05-15 18:22:52 1934
1934 
由于DSP將超強的高速實時處理能力和豐富的外設(shè)功能集于一身,目前,以DSP為核心的嵌入式運動控制器已經(jīng)成為開放式運動控制器的發(fā)展主流,并獲得廣泛的應(yīng)用。本文通過 對運動控制
2011-10-24 16:09:543189 
作者:吳 輝,羅富文,杜文廣 運用低功耗Cortex—M3微控制器STM32F103VBT6和FPGA芯片設(shè)計一種基于CAN總線的運動控制器。介紹系統(tǒng)的體系結(jié)構(gòu)、主要硬件設(shè)計和軟件結(jié)構(gòu)。利用FPGA
2021-03-24 14:50:529709 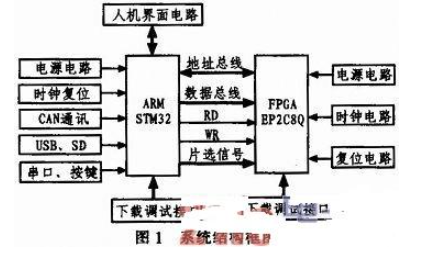
本帖最后由 mr.pengyongche 于 2013-4-30 03:09 編輯
DSP+FPGA在高速高精運動控制器中的應(yīng)用 摘要:數(shù)字信號處理器具有高效的數(shù)值運算能
2012-12-28 11:20:34
什么是運動控制器運動控制器的特點運動控制器的控制形式什么是PLCPLC的特點運動控制器與PLC的區(qū)別
2021-03-02 06:52:24
254 個)控制器和PC/觸摸屏組成控制網(wǎng)絡(luò);也可應(yīng)用于需要獨立運行的場合。? DMC600M 系列運動控制器,其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補算法、脈沖信號產(chǎn)生及加減
2019-09-12 11:36:00
哪位大大做運動控制器開發(fā)的啊?小弟真誠拜師求教。留下qq:1151628760
2014-09-16 09:45:26
和靈活性,可實時完成運動控制過程中復(fù)雜的邏輯處理和控制算法,能實現(xiàn)多軸高速高精度的伺服控制。本文選用DSP與FPGA作為運動控制器的核心部件,設(shè)計了通用型運動控制器。其中DSP用于運動軌跡規(guī)劃、速度控制
2019-07-31 08:15:26
運動控制器是運動控制系統(tǒng)的核心部件。目前,國內(nèi)的運動控制器大致可以分為3類:第1類是以單片機等微處理器作為控制核心的運動控制器。這類運動控制器速度較慢、精度不高、成本相對較低,只能在一些低速運行和對軌跡要求不高的輪廓運動控制場合應(yīng)用。
2019-10-16 06:22:14
使用這類控制器。3、是基于PC總線的以DSP或FPGA作為核心處理器的開放式運動控制器。這類開放式運動控制器以DSP芯片作為運動控制器的核心處理器,以PC機作為信息處理平臺,運動控制器以插件形式嵌入
2019-12-10 10:41:31
EtherCAT總線運動控制器硬件是如何進(jìn)行接線的?EtherCAT總線運動控制器有哪些參數(shù)設(shè)置?
2021-07-15 13:02:24
申請理由:1、計算量大,計算復(fù)雜,實時性要求高,要求速度快,C6748能為復(fù)雜算法事實計算處理提供保障。2、要求專門用于電機控制點的DSP,完成運動控制的規(guī)劃和插補計算。項目描述:基于嵌入式雙核OMAP-L138和可編程器件FPGA的數(shù)控系統(tǒng)方案,要求具有高性能,模塊化,系統(tǒng)更易操作和移植的特點
2015-09-09 17:03:56
嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來,工業(yè)控制對運動控制系統(tǒng)的要求越來越高,為了滿足新一代運動控制系統(tǒng)的各項性能要求,嵌入式運動控制器應(yīng)運而生。而基于ARM運動控制芯片的新一代運動
2019-10-11 06:30:55
數(shù)控系統(tǒng)的發(fā)展趨勢。本運動控制器采用TI公司的高性能浮點DSP作為主控芯片,通過ISA接口與PC協(xié)調(diào)并進(jìn)行數(shù)據(jù)交換,以PC計算機作為基本平臺,以DSP高速運動控制卡作細(xì)插補、伺服控制的核心,對直線電機的運動進(jìn)行控制,取得了良好的實際應(yīng)用效果。
2019-06-18 06:39:25
數(shù)控系統(tǒng)的發(fā)展趨勢。本運動控制器采用TI公司的高性能浮點DSP作為主控芯片,通過ISA接口與PC協(xié)調(diào)并進(jìn)行數(shù)據(jù)交換,以PC計算機作為基本平臺,以DSP高速運動控制卡作細(xì)插補、伺服控制的核心,對直線電機的運動進(jìn)行控制,取得了良好的實際應(yīng)用效果。
2019-06-18 08:13:08
(FPGA)作為核心處理器的協(xié)處理架構(gòu)的開放式運動控制器。該控制器將PC機和DSP的信息處理能力與FPGA的外圍擴展功能很好的結(jié)合在一起,具有信息處理能力強、模塊化、開放程度高、運動軌跡控制精確等優(yōu)點。
2019-09-04 07:10:42
(FPGA)作為核心處理器的協(xié)處理架構(gòu)的開放式運動控制器。該控制器將PC機和DSP的信息處理能力與FPGA的外圍擴展功能很好的結(jié)合在一起,具有信息處理能力強、模塊化、開放程度高、運動軌跡控制精確等優(yōu)點。
2019-08-30 08:27:17
基于DSP與FPGA的運動控制器設(shè)計 設(shè) 計 了 一 種 基 于 和 的 四 軸 伺 服 電 機 運 動 控 制 器 該 控 制 器 選 用 與 作為 核 心 部 件 針 對 運 動 控 制 中
2012-08-11 11:54:11
基于DSP與FPGA的運動控制器設(shè)計設(shè)計了一種基于DSP和FPGA的四軸伺服電機運動控制器,該控制器選用DSP與FPGA作為核心部件。針對運動控制中的一些具體問題,如高速、高精度、實時控制等,規(guī)劃
2009-09-19 09:43:00
請教一下,基于DSP和FPGA的嵌入式控制器該如何去設(shè)計?
2021-05-06 09:16:19
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機載三軸伺服控制平臺的控制器進(jìn)行了設(shè)計與優(yōu)化。
2019-07-16 07:41:04
現(xiàn)在市場上有基于FPGA的多電機運動控制器的成品嗎,注意是成品喲,成品!成品!成品!
2016-01-19 11:22:17
的邏輯處理和控制算法,能實現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計運動控制器,其中DSP用于運動軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運動控制器的精插補功能,用于精確計算步進(jìn)電機或伺服驅(qū)動元件的控制脈沖,同時接收并處理脈沖型位置反饋信號。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
,工作于開環(huán)控制方式。由于這類控制器不能提供連續(xù)插補功能,也沒有前饋功能,特別是對于大量的小線段連續(xù)運動的場合不能使用這類控制器。第3類是基于PC總線的以DSP或FPGA作為核心處理器的開放式運動控制器
2019-07-31 07:52:19
為解決精密制造對低成本、可移植性強的通用型多軸數(shù)控系統(tǒng)的迫切需求,給出一種基于ARM微處理器S3C2440和專用DSP運動控制芯片PCL65045BL組合的嵌入式四軸運動控制器。
2021-04-20 06:23:57
今后基于計算機標(biāo)準(zhǔn)總線的運動控制器仍然是市場的主流,但是,基于網(wǎng)絡(luò)的嵌入式運動控制器會有較大的發(fā)展。基于計算機標(biāo)準(zhǔn)總線的通用運動控制器主要是板卡結(jié)構(gòu),采用的總線大都為ISA、PCI。由于它們的應(yīng)用依附于通用PC 計算機平臺,從工業(yè)控制的角度分析,這種運動控制器的優(yōu)缺點如下:
2019-07-23 06:46:17
本文采用Verilog FPGA設(shè)計懸掛運動控制系統(tǒng)的控制器,通過輸入模塊傳送控制參數(shù),采用HDL語言編程實現(xiàn)的控制算法,驅(qū)動步進(jìn)電機,對懸掛運動物體進(jìn)行精確的控制。
2021-05-06 07:11:03
EtherCAT總線擴展模塊包含哪些?怎樣去使用正運動技術(shù)運動控制器EtherCAT總線?
2021-09-27 08:34:04
該控制器以DSP和FPGA為核心器件,針對運動控制中的實時控制、高精度等具體問題,規(guī)劃了DSP的功能擴展,并在FPGA上擴展了功能相互獨立的四軸運動控制電路。該電路實現(xiàn)了四路控制信號輸出,四路編碼
2019-06-14 08:30:00
基于DSP/FPGA的運動控制器該如何去設(shè)計?
2021-05-25 06:49:01
高速串行數(shù)據(jù)接口設(shè)計高速專用GFP處理器的FPGA實現(xiàn)基于DSP與FPGA的運動控制器設(shè)計基于FPGA的16位數(shù)據(jù)路徑的AESIP核基于FPGA的CAN總線通信系統(tǒng)基于FPGA的DDS設(shè)計基于FPGA
2012-02-02 17:26:14
介紹一種基于 DSP的多軸運動控制器的設(shè)計方案,包括控制器的各部分組成及功能,并給出相應(yīng)的示意圖。此種控制器設(shè)計具有集成度高、運算速度快、處理能力強等特點。
2009-04-03 10:53:24 37
37 由于DSP將超強的高速實時處理能力和豐富的外設(shè)功能集于一身,目前,以DSP為核心的嵌入式運動控制器已經(jīng)成為開放式運動控制器的發(fā)展主流,并獲得廣泛的應(yīng)用。本文通過對運
2009-08-13 08:39:5713 設(shè)計了一種新型的基于SOPC(system on a programmable chip)的運動控制器,該運動控制器以PC 機為上位機,采用數(shù)字控制方式實現(xiàn)三坐標(biāo)的運動控制和相關(guān)I/O 接口控制功能。運動控制器采
2009-09-01 15:09:4320 DSP控制器及其應(yīng)用:DSP控制器是一款針對于工業(yè)控制而開發(fā)的DSP芯片,是一款32位的高性能單片機。本書首先概述DSP控制器的發(fā)展過程及其特點,接著介紹DSP控制器的總體結(jié)構(gòu),特
2009-10-09 15:43:2926 運動控制器已經(jīng)從以單片機或微處理器作為核心的運動控制器和以專用芯片(ASIC)作為核心處理器的運動控制器,發(fā)展到了基于PC總線的以DSP和FPGA作為核心處理器的開放式運動控
2010-10-07 15:30:3876 DSP控制器是一款針對于工業(yè)控制而開發(fā)的DSP芯片,是一款32位的高性能單片機。本書首先概述DSP控制器的發(fā)展過程及其特點,接著介紹DSP控制器的總體結(jié)構(gòu),特別說明DSP控制器多組
2010-12-13 12:52:4767 基于DSP和電壓反饋的機器人多軸運動控制器設(shè)計
引言
對于機器人控制技術(shù),實時性和穩(wěn)定性是研究的重點。現(xiàn)階段,機器人控制的主要
2009-12-15 10:02:43887 基于DSP的運動控制器的開發(fā)
運動控制器是一種用于多種運動控制場合的上位控制單元,通常采用專業(yè)運動控制芯片或高速DSP來控制步進(jìn)電機或伺服電機。運動控制器
2009-12-25 09:44:072332 
摘要:針對數(shù)控系統(tǒng)的工作特點和要求,通過對TI公司新推出的DSP芯片TMS320F2812和ALTERA公司的FPGA芯片EP1K30功能和特點的深入分析,給出了一種基于DSP和FPGA的運動控制卡的設(shè)計與實現(xiàn)。在充分考慮上述芯片特點和資源的基礎(chǔ)上,該卡采用DSP和FPGA取代單片機
2011-02-27 13:29:19106 本文選用DSP與FPGA作為 運動控制器 的核心部件,設(shè)計了通用型運動控制器。其中DSP用于運動軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運動控制器的精插補功能,用于精確計算步進(jìn)
2011-09-01 15:08:422013 
以DSP作為核心,配以FPGA作為外圍接口擴展和管理,進(jìn)行了控制器設(shè)計。通過A/D采樣和正交編碼QEP,可以獲取不同類型傳感器的輸入信號;D/A和PWM可以輸出模擬和數(shù)字的控制信號;擴展的
2011-11-15 11:39:31160 設(shè)計了一種基于DSP與FPGA的運動控制器。具有結(jié)構(gòu)簡單、開放性、模塊化等特點,能夠較好的滿足運動控制器的實時性和精確性。
2012-02-27 15:34:305565 介紹了一種基于DSP和FPGA的磁鐵電源控制器的設(shè)計方案,闡述了該控制器硬件系統(tǒng)的組成,包括信號調(diào)理電路、中間數(shù)據(jù)處理部分、后端的驅(qū)動電路。同時給出了DSP和FPGA之間通過SPI接口
2012-07-27 16:20:3136 設(shè)計了一種基于DSP與FPGA的運動控制器。該控制器以DSP為控制核心,用FPGA構(gòu)建運動控制器與傳感器以及電機驅(qū)動器的接口電路。充分發(fā)揮了DSP強大的運算能力和FPGA的并行處理能力。具有
2012-10-26 15:21:5193 運用低功耗C0rtex-M3微控制器STM32F103VBT6和FPGA芯片設(shè)計一種基于CAN總線的運動控制器。介紹系統(tǒng)的體系結(jié)構(gòu)、主要硬件設(shè)計和軟件結(jié)構(gòu)。利用FPGA高速處理能力實現(xiàn)控制算法,與外界通信采
2013-01-31 14:33:3945 介紹了一種基于FPGA的多軸控制器,控制器主要由ARM7(LPC2214)和FPGA(EP2C5T144C8)及其外圍電路組成,用于同時控制多路電機的運動。利用Verilog HDL 硬件描述語言在FPGA中實現(xiàn)了電機控制邏
2013-04-27 16:23:1182 分析了運動控制器對機器人的重要性;提出了一種高性能的基于DSP芯片的運動控制器的整體設(shè)計方案,該控制器集控制電路、數(shù)據(jù)采集模塊和驅(qū)動電路于一體,能夠很好的完成機器人運
2013-05-27 17:16:2577 提出了一種基于DSP和FPGA 的通用型運動控制系統(tǒng)!大大降低了系統(tǒng)成本
2013-09-23 17:49:3759 基于DSP的多軸運動控制器的研究與設(shè)計。
2016-03-29 14:11:487 基于DSP與FPGA的運動控制器設(shè)計,下來看看。
2016-05-10 11:24:3332 設(shè)計了一種基于DSP 和FPGA 的四軸伺服電機運動控制器,該控制器選用DSP 與FPGA 作為核心部件。針對運動控制中的一些具體問題,如高速、高精度、實時控制等,規(guī)劃了DSP 的功能擴展,在
2017-09-21 11:24:5210 GUC-T 系列運動控制器,是將PC 技術(shù)與運動控制技術(shù)相結(jié)合的產(chǎn)物。它以Intel 標(biāo)準(zhǔn)X86 架構(gòu)的CPU 和芯片組為系統(tǒng)處理器,采用高性能DSP 和FPGA 作為運動控制協(xié)處理器。在延續(xù)了固
2017-09-23 12:31:494 GUC-MECHATROLINK系列嵌入式網(wǎng)絡(luò)運動控制器是一款基于現(xiàn)場總線的運動控制器。它通過DSP和FPGA進(jìn)行運動規(guī)劃,通過專用協(xié)議棧控制現(xiàn)場總線的伺服驅(qū)動器。GUC-MECHATROLINK
2017-10-11 11:43:521 GE-Laser多軸運動控制器是一款基于PCI總線的運動控制器,可用于控制步進(jìn)電機和伺服系統(tǒng)。它通過DSP和FPGA進(jìn)行運動規(guī)劃,支持任意2軸直線、圓弧插補,支持3軸、4軸直線插補。GE-Laser
2017-10-11 17:51:534 GUS系列嵌入式多軸運動控制器集成了工業(yè)計算機和運動控制器,采用英特爾X86架構(gòu)的CPU和芯片組為系統(tǒng)處理器,高性能DSP和FPGA為運動控制協(xié)處理器。GUS系列嵌入式運動控制器提供計算機常見接口
2017-10-12 15:13:4610 GUS Controller 系列運動控制器,是將PC 技術(shù)與運動控制找支術(shù)相結(jié)合的產(chǎn)物。它以X86 架構(gòu)的CPU 和芯片糾為系統(tǒng)處理器,采用高性能DSP 和FPGA 作為運動控制協(xié)處理器。在延續(xù)了
2017-10-12 15:32:2511 基于DSP_FPGA與CAN總線的跟蹤控制器設(shè)計
2017-10-21 08:52:075 的邏輯處理和控制算法,能實現(xiàn)多軸高速高精度的伺服控制。本文選用DSP與FPGA作為運動控制器的核心部件,設(shè)計了通用型運動控制器。其中DSP用于運動軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運動控制器的精插補功能,用于精確
2017-10-25 11:31:313 和網(wǎng)絡(luò)技術(shù)的不斷發(fā)展,運動控制器已從以單片機和微處理器作為核心的運動控制器和以專用芯片(ASIC)作為核心處理器的運動控制器,發(fā)展到了基于PC機平臺的以數(shù)字信號處理器(DSP)和現(xiàn)場可編程門陣列(FPGA)作為核心處理器的協(xié)
2017-10-26 11:19:197 1 運動控制器硬件結(jié)構(gòu) 本運動控制器的硬件結(jié)構(gòu)主要分為如下幾個模塊:DSP+CPLD 主控模塊,包括 DSP 核心 模塊和 CPLD 驅(qū)動與擴展模塊;通信接口模塊,包括 PCI 總線、USB 總線
2017-11-03 10:30:472 運動控制系統(tǒng)廣泛地應(yīng)用于工業(yè)控制領(lǐng)域,而嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來,工業(yè)控制對運動控制系統(tǒng)的要求越來越高,為了滿足新一代運動控制系統(tǒng)的各項性能要求,嵌入式運動控制器應(yīng)運而生
2018-06-24 08:12:008060 
本文首先介紹了運動控制器的架構(gòu)組成及優(yōu)缺點,其次介紹了運動控制器的功能,最后闡述了運動控制器的工作原理及應(yīng)用。
2018-04-23 18:40:2238998 運動控制器是整個運動控制系統(tǒng)的核心,作用是執(zhí)行編寫的程序,通過采集現(xiàn)場的I/O信號,實現(xiàn)各種運算功能,對程序流程和I/O設(shè)備進(jìn)行控制,并與操作站和其他現(xiàn)場設(shè)備進(jìn)行通信。
2019-09-18 10:39:126122 支持多個(最多 254 個)控制器和PC/觸摸屏組成控制網(wǎng)絡(luò);也可應(yīng)用于需要獨立運行的場合。 DMC600M 系列運動控制器,其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補算法、脈沖信號產(chǎn)生及加減速控制、I/O 信號的檢測處理,均由硬件和固件實現(xiàn),確保了運動控制高速
2020-03-17 14:28:361505 本文開發(fā)的開放式運動控制器以PC機為平臺,完成坐標(biāo)變換、軌跡規(guī)劃、粗插補運算等控制指令的設(shè)置和發(fā)送,同時可以實時顯示當(dāng)前伺服系統(tǒng)的運動位置、速度和電機狀態(tài)等參數(shù)。運動控制器以DSP芯片作為核心處理器
2020-09-23 08:44:002041 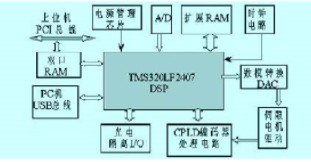
介紹了一種用基于FPGA的DSP技術(shù)來設(shè)計電液伺服系統(tǒng)控制器的方法。該方法克服了傳統(tǒng)伺服控制器的一些不足, 可將許多復(fù)雜的實時控制算法硬件化實現(xiàn), 并根據(jù)控制效果的優(yōu)劣調(diào)整控制算法, 從而
2020-11-30 14:02:003077 
DSP控制器原理與應(yīng)用說明。
2021-03-30 09:50:5587 運動控制器是一種電子設(shè)備,通常與運動控制軟件配合使用,用于控制機器人、數(shù)控機床和其他自動化設(shè)備移動或執(zhí)行各種任務(wù)。運動控制器主要由一臺計算機和相關(guān)的硬件組成,如數(shù)字信號處理器(DSP)和模擬/數(shù)字
2023-07-31 17:42:411446 
現(xiàn)在PLC的運動控制功能越來越強了,圓弧插補、螺旋插補、電子凸輪都能輕松勝任了,那運動控制器和具備運動控制功能的PLC的差別在哪里,運動控制器以后的優(yōu)勢又在哪里?PLC及運動控制器發(fā)展到今天,它們在
2023-08-08 08:09:462277 運動控制器是一種電子設(shè)備,通常與運動控制軟件配合使用,用于控制機器人、數(shù)控機床和其他自動化設(shè)備移動或執(zhí)行各種任務(wù)。運動控制器主要由一臺計算機和相關(guān)的硬件組成,如數(shù)字信號處理器(DSP)和模擬/數(shù)字
2023-09-21 08:08:391842 電子發(fā)燒友網(wǎng)站提供《基于DSP和FPGA的通用控制器設(shè)計.pdf》資料免費下載
2023-10-25 10:57:562
 電子發(fā)燒友App
電子發(fā)燒友App



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論