 電子發(fā)燒友App
電子發(fā)燒友App



摘要:分析了線陣CCD用于實(shí)時(shí)檢測(cè)系統(tǒng)的特點(diǎn)和要求,介紹了一種基于AT89C2051單片機(jī)的線陣CCD實(shí)時(shí)檢測(cè)系統(tǒng)的設(shè)計(jì)方案。本方案電路結(jié)構(gòu)簡(jiǎn)單可靠,信號(hào)處理靈活檢當(dāng),有一定的通用性和啟發(fā)性。
CCD(Charge Coupled Devices)電荷耦合器件應(yīng)用系統(tǒng)的關(guān)鍵技術(shù)在于CCD驅(qū)動(dòng)時(shí)序的產(chǎn)生和輸出信號(hào)的采集與處理。目前驅(qū)動(dòng)主要有直接數(shù)字電路驅(qū)動(dòng)、EPROM驅(qū)動(dòng)、專(zhuān)用IC驅(qū)動(dòng)、復(fù)雜的CPLD驅(qū)動(dòng)等常用的驅(qū)動(dòng)方法,但是它們存在著邏輯設(shè)計(jì)較為復(fù)雜、調(diào)試?yán)щy、柔性較差等缺點(diǎn)。在數(shù)據(jù)采集和處理方面,大多數(shù)都經(jīng)過(guò)差動(dòng)放大、采樣保持、A/D轉(zhuǎn)換,再通過(guò)總線或采集卡等接口與PC機(jī)相連。這種系統(tǒng)結(jié)構(gòu)龐大,而且在信號(hào)處理、通信軟件和界面設(shè)計(jì)等方面要耗費(fèi)大量的精力。應(yīng)該說(shuō)這種應(yīng)用系統(tǒng)在靜態(tài)測(cè)量處理方面有其優(yōu)點(diǎn),但如果要滿(mǎn)足實(shí)時(shí)控制系統(tǒng)的連續(xù)檢測(cè)要求以及系統(tǒng)體積精小而容易裝配等特點(diǎn),則必須簡(jiǎn)化驅(qū)動(dòng)電路、數(shù)據(jù)采集過(guò)程和處理方式。本文正是出于這種考慮,開(kāi)發(fā)出了一種基于單片機(jī)的實(shí)時(shí)性檢測(cè)系統(tǒng):僅用Atmel公司一塊小型的AT89C2051單片機(jī)便能產(chǎn)生穩(wěn)定、精確、高速的驅(qū)動(dòng)脈沖。該電路結(jié)構(gòu)簡(jiǎn)單、調(diào)試方便、CPU占用率低,將驅(qū)動(dòng)、采集和處理融為一體,而且與上位機(jī)的連接僅用兩條導(dǎo)線便可實(shí)現(xiàn)檢測(cè)信息傳輸。這種方法大大簡(jiǎn)化了線陣CCD檢測(cè)系統(tǒng)的結(jié)構(gòu),在機(jī)器人視覺(jué)、智能小車(chē)、軌跡導(dǎo)引等動(dòng)態(tài)檢測(cè)方面有獨(dú)特的應(yīng)用優(yōu)勢(shì)。
1 線陣CCD實(shí)時(shí)檢測(cè)系統(tǒng)模型
以機(jī)器人路徑識(shí)別為例具體說(shuō)明如何利用線陣CCD開(kāi)發(fā)實(shí)時(shí)動(dòng)態(tài)環(huán)境檢測(cè)系統(tǒng)。
假設(shè)在一個(gè)深色(如黑色、藍(lán)、綠等)平面上用寬度為30mm的白線作為機(jī)器人將要運(yùn)動(dòng)的軌跡導(dǎo)引線,利用線陣CCD開(kāi)發(fā)出檢測(cè)白線軌跡的檢測(cè)系統(tǒng)。先利用光學(xué)系統(tǒng)用攝像頭將路面信息成像到CCD的感光面上;然后讀取白線的位置檢測(cè)信息作為機(jī)器人的視覺(jué),讓機(jī)器人在上位機(jī)的控制下沿白線軌跡運(yùn)動(dòng)。這是一個(gè)典型的CCD實(shí)時(shí)檢測(cè)系統(tǒng)。整體檢測(cè)系統(tǒng)如圖1所示。
2 硬件設(shè)計(jì)
利用CCD的光電特性,設(shè)計(jì)出的電路應(yīng)能判別視頻信號(hào)上輸出的深色和白色區(qū)別,這樣才能識(shí)別白線,時(shí)刻反應(yīng)機(jī)器人當(dāng)前所在的物理位置,以便對(duì)其運(yùn)動(dòng)做相應(yīng)的調(diào)整。 線陣CCD選用NEC公司的μPD3575D型號(hào)。芯片為20腳DIP封裝,像敏單元數(shù)目為1024,像敏單元大小為14μm×l41μm×l4μm(相鄰像元中心距為14μm),光敏區(qū)域采用高靈敏度和低暗電流PN結(jié)作為光敏單元,內(nèi)置采用保持電路、輸出放大電路,外觀尺寸為25.5mm×10mm,易于裝卸。該器件工作在5V驅(qū)動(dòng)(脈沖)、12V電源條件下。
系統(tǒng)簡(jiǎn)要電路如圖2所示。驅(qū)動(dòng)用的單片機(jī)是AT89C2051。它是Atmel公司生產(chǎn)的自帶2KB可編程Flash存儲(chǔ)器的與MSC-51兼容的高性能處理器。它與常規(guī)的51芯片有相同的核心和相近的結(jié)構(gòu)功能如RAM、定時(shí)/記數(shù)器、中斷結(jié)構(gòu)、串行口、振蕩器和時(shí)鐘電路等;有最高達(dá)24MHz的振蕩頻率,能高速地驅(qū)動(dòng)CCD;有較少的精簡(jiǎn)I/O端口,因此體積很小,非常適用做小型應(yīng)用系統(tǒng)的處理器。對(duì)很多嵌入式控制應(yīng)用提供了一個(gè)高度靈活的有效解決方案。本線陣CCD檢測(cè)系統(tǒng)發(fā)揮了其小而靈活的特點(diǎn),既陡系統(tǒng)資源得到了充分的應(yīng)用又讓系統(tǒng)結(jié)陶精簡(jiǎn)緊奏,電路中二值化部分的電位器R_T用來(lái)調(diào)整二值化比較電平的閥值(0~5V),通過(guò)它調(diào)節(jié)整個(gè)CCD的灰度分辨率。同時(shí)整個(gè)系統(tǒng)對(duì)外接口十分簡(jiǎn)單,只需接上電源和兩條通向上位機(jī)的信號(hào)線。上位機(jī)只需等待同步信號(hào)FC和檢測(cè)脈沖信號(hào)BIN_OUT到來(lái)的中斷信號(hào),與AT89C2051相互獨(dú)立,彼此之間沒(méi)有任何時(shí)鐘信號(hào)或復(fù)用關(guān)系。因此實(shí)際運(yùn)用中器件互換性較強(qiáng)。既可選用普通的AT89C51進(jìn)行一定的端口擴(kuò)展接收FC和BIN_OUT,也可選用中斷能力較強(qiáng)的SOC芯片C8051FXX系列等。整個(gè)檢測(cè)系統(tǒng)具有良好的柔性,最終電路體積可控制在手掌心大小之內(nèi)。
圖2
3 信號(hào)時(shí)序及軟件設(shè)計(jì)
由于硬件設(shè)計(jì)時(shí)考慮用軟件產(chǎn)生CCD驅(qū)動(dòng)信號(hào),這樣軟件設(shè)計(jì)的最大難點(diǎn)為既要滿(mǎn)足CCD芯片的驅(qū)動(dòng)信號(hào)要求又要完成檢測(cè)信息的完整表述。綜合比較各種方法后得出了整個(gè)軟件設(shè)計(jì)思路如下:
驅(qū)動(dòng)描述:NEC公司的線陣μPD3575D所需驅(qū)動(dòng)信號(hào)與TOSHIBA公司傳統(tǒng)的TCD系列略有差異,具體驅(qū)動(dòng)信號(hào)為:時(shí)鐘φ10、轉(zhuǎn)移脈沖φTG、復(fù)位時(shí)鐘φRO和采樣保持時(shí)鐘φSHO,時(shí)序關(guān)系如圖3所示。
μPD3575D為雙溝道線陣CCD,它有兩列525位的CCD移位寄存器,分列在像敏陣列的兩邊,在一個(gè)積分的φTG周期中至少有525個(gè)φ10脈沖:另外考慮到一些暗信號(hào)和空驅(qū)動(dòng).本系統(tǒng)開(kāi)發(fā)中取φ10脈沖寬度約為10μs、φTG積分時(shí)間為12ms。
單片機(jī)驅(qū)動(dòng)主要是通過(guò)程序編程控制輸出驅(qū)動(dòng)的時(shí)序信號(hào),可以通過(guò)修改程序方便地修改輸出時(shí)序,單片機(jī)是靠指令產(chǎn)生I/O口的輸出邏輯,在使用邏輯轉(zhuǎn)移指令時(shí),必須注意精心配置,避免產(chǎn)生驅(qū)動(dòng)時(shí)序相位上的不同步。因?yàn)檗D(zhuǎn)移指令要根據(jù)某些條件產(chǎn)生程序分支,而分支程序在不同的條件下執(zhí)行周期通常不同,會(huì)造成CCD驅(qū)動(dòng)時(shí)序不同步。
檢測(cè)過(guò)程描述:參見(jiàn)圖2的系統(tǒng)電路圖,當(dāng)CCD被驅(qū)動(dòng)后因其光電特性會(huì)有視頻模擬信號(hào)Vout輸出,信號(hào)如圖4所示。可以看出:模擬信號(hào)Vout在CCD掃描到深色區(qū)和白色區(qū)有明顯的幅值大小區(qū)別,要提取的信息就是這個(gè)變化的電壓信號(hào),但單片機(jī)不能直接處理模擬信號(hào)Vout,因此必須先將Vout通過(guò)二值化處理得到數(shù)字信號(hào)BIN(見(jiàn)圖2二值化電路部分)。這樣便得到了反映白線左右兩個(gè)邊緣的脈沖信號(hào)BIN。為了方便上位機(jī)的處理,不直接輸出信號(hào)BIN,而是將BIN反饋給AT89C2051,讓其通過(guò)程序編制來(lái)捕捉其上升沿和下降沿的跳變,再?gòu)牧硗獾囊_輸出與BIN上升沿和下降沿同步的負(fù)脈沖信號(hào)BIN_OUT。這樣上位機(jī)可方便地通過(guò)中斷檢測(cè)到白線的左右側(cè)。這里AT89C205l還要輸出一個(gè)同步信號(hào)FC(即驅(qū)動(dòng)轉(zhuǎn)移脈沖φTG)。因?yàn)橄到y(tǒng)是在連續(xù)掃描地面信息,故FC脈沖可標(biāo)志CCD上一次掃描的結(jié)束和新一行掃描的開(kāi)始。新一行開(kāi)始掃描時(shí),上位機(jī)收到FC負(fù)脈沖后可進(jìn)入中斷對(duì)定時(shí)器TO、Tl清零并立即開(kāi)始計(jì)數(shù)。當(dāng)收到BIN_OUT的第一個(gè)負(fù)脈沖后進(jìn)入中斷并停止,定時(shí)器TO;當(dāng)收到BIN_OUT的第二個(gè)負(fù)脈沖后進(jìn)人中斷并停止定時(shí)器T1,讀出定時(shí)器TO、T1里的數(shù)t0、t1。t0、t1便反映了路面白線的坐標(biāo)位置,很明顯t1與t0之差便是白線寬度。
綜合以上驅(qū)動(dòng)和檢測(cè)信號(hào)要求得出:在主程序中用一個(gè)死循環(huán)產(chǎn)生連續(xù)的四路驅(qū)動(dòng)脈沖,并通過(guò)嵌入相應(yīng)的其他功能的指令來(lái)保證四個(gè)驅(qū)動(dòng)脈沖的相位關(guān)系,對(duì)BIN信號(hào)的上升沿和下降沿的判斷也在此循環(huán)中完成。對(duì)BIN信號(hào)的當(dāng)前狀態(tài)還必須有一個(gè)狀態(tài)標(biāo)志BIN_STATE。一旦遇到BIN信號(hào)有電子變化便給出相應(yīng)的BIN_OUT負(fù)脈沖,而B(niǎo)IN_OUT恢復(fù)高電平是靠定時(shí)器TO溢出中斷服務(wù)程序?qū)崿F(xiàn)的。
本系統(tǒng)用一片小型單片機(jī)完全實(shí)現(xiàn)了預(yù)定功能,幾乎沒(méi)有復(fù)雜的外圍電路器件,結(jié)構(gòu)簡(jiǎn)單可靠,硬件、軟件代價(jià)都較低,系統(tǒng)成本預(yù)算較低。整個(gè)檢測(cè)系統(tǒng)角在機(jī)器人視覺(jué)上實(shí)驗(yàn)效果也非常理想。系統(tǒng)可根據(jù)具體的需要和要求進(jìn)行擴(kuò)展和改變,如增加信號(hào)輸出、改變檢測(cè)系統(tǒng)和上位機(jī)的信號(hào)接口等。


基于FPGA的線陣CCD子圖像提取模塊的設(shè)計(jì)與仿真
 1778
1778
采用線陣CCD器件實(shí)現(xiàn)車(chē)輛采集和檢測(cè)系統(tǒng)的設(shè)計(jì)
1579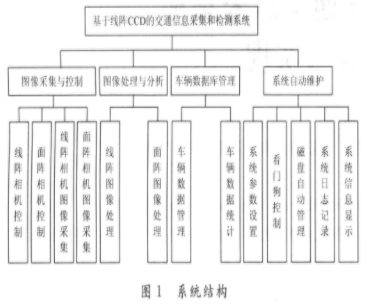
基于面陣CCD測(cè)寬技術(shù)實(shí)現(xiàn)激光輔助測(cè)寬系統(tǒng)的設(shè)計(jì)
1802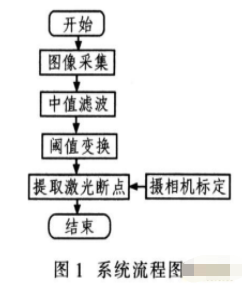
15份CCD驅(qū)動(dòng)的文獻(xiàn)資料合集(基于FPGA、CPLD設(shè)計(jì)與實(shí)現(xiàn))
單片機(jī)車(chē)道線檢測(cè)模型的相關(guān)資料分享
線陣CCD測(cè)量開(kāi)發(fā)
線陣CCD測(cè)量移動(dòng)物體邊緣位置
線陣CCD驅(qū)動(dòng)電路的設(shè)計(jì)方法
線陣CCD驅(qū)動(dòng)問(wèn)題
CMOS線陣傳感器與CCD線陣傳感器介紹
FPGA基于線陣CCD驅(qū)動(dòng)控制,模擬信號(hào)處理的設(shè)計(jì)研究
IAP15W4K 單片機(jī) 制作 led線陣 相關(guān)資料分享
關(guān)于基于單片機(jī)的教室人數(shù)實(shí)時(shí)檢測(cè)系統(tǒng)的設(shè)計(jì)
基于單片機(jī)的實(shí)時(shí)溫度檢測(cè)報(bào)警系統(tǒng)
基于線陣CCD的圖像和位置傳感系統(tǒng)
怎樣設(shè)計(jì)一種線陣CCD的數(shù)據(jù)采集系統(tǒng)?
求Labview采集線陣CCD數(shù)據(jù)的程序啊
求一種基于FPGA的線陣CCD驅(qū)動(dòng)時(shí)序及模擬信號(hào)處理的設(shè)計(jì)
求助:線陣CCD圖像攝入光機(jī)電一體化測(cè)試系統(tǒng)
單片機(jī)綜合開(kāi)發(fā)系統(tǒng)電路原理圖
 169
169線陣CCD數(shù)據(jù)采集及LCD顯示
45圖形點(diǎn)陣液晶顯示的單片機(jī)開(kāi)發(fā)系統(tǒng)的設(shè)計(jì)
24基于FPGA的線陣CCD圖像采集控制的實(shí)現(xiàn)
23高靈敏度TDI 線陣CCD 圖像系統(tǒng)研究
39利用線陣CCD自動(dòng)測(cè)量航空相機(jī)鏡頭的焦距
18基于線陣CCD 的全息光柵位移自動(dòng)測(cè)量系統(tǒng)的研制與開(kāi)發(fā)
23鋼板寬度高速實(shí)時(shí)在線檢測(cè)系統(tǒng)研究
18鋼板寬度高速實(shí)時(shí)在線檢測(cè)系統(tǒng)研究
18線陣CCD傳感器檢測(cè)鐵路軌道不平順狀態(tài)
25基于80C196KB的線陣CCD高速采集系統(tǒng)
38基于CPLD和DSP的線陣CC 檢測(cè)系統(tǒng)的設(shè)計(jì)
22線陣CCD技術(shù)在鋼板測(cè)寬儀中的應(yīng)用
27基于ATmega系列單片機(jī)的電力檢測(cè)設(shè)備
45線陣CCD在巖屑圖像采集中的應(yīng)用
34基于線陣CCD的精密測(cè)角系統(tǒng)
32智能式水位實(shí)時(shí)檢測(cè)系統(tǒng)技術(shù)研究
24機(jī)載三線陣CCD攝影測(cè)量的直接解算模型與精度分析
10CCD線材直徑自動(dòng)在線檢測(cè)系統(tǒng)
11基于CPLD的線陣CCD驅(qū)動(dòng)的實(shí)現(xiàn)
68用單片機(jī)驅(qū)動(dòng)線陣CCD的探討
109TOPAV-2008單片機(jī)開(kāi)發(fā)系統(tǒng)--USER MANUAL
45線陣CCD通用采集系統(tǒng)設(shè)計(jì)
0基子線陣CCD的長(zhǎng)距離傳輸外總線的設(shè)計(jì)
1055
通用線陣CCD采集系統(tǒng)設(shè)計(jì)
2726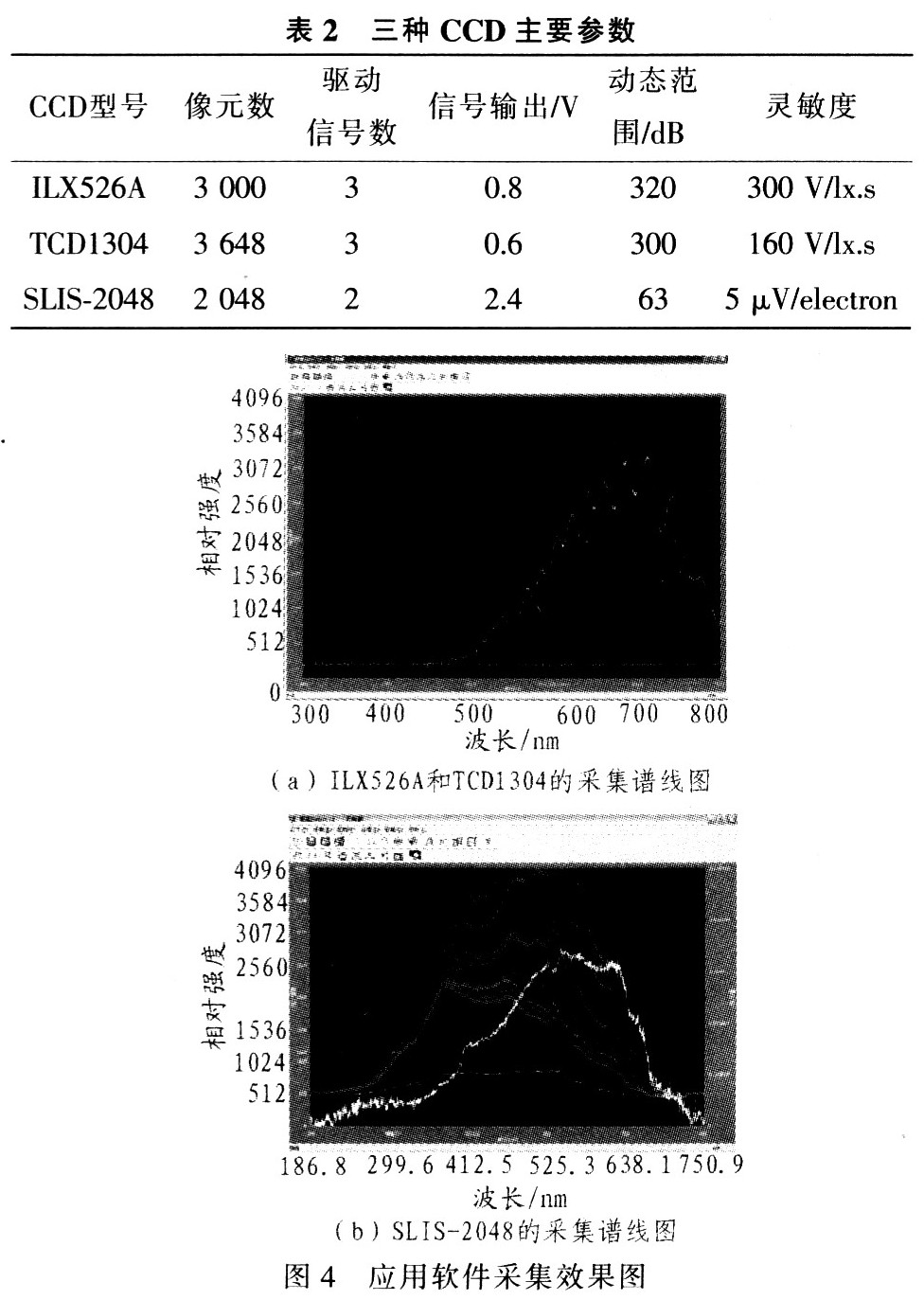
基于線陣CCD的圖像和位置傳感系統(tǒng)
1492
單片機(jī)開(kāi)發(fā)系統(tǒng)種類(lèi)
2937線陣CCD微米級(jí)圓鋼光電測(cè)徑儀的設(shè)計(jì)方案
1801
基于單片機(jī)的魚(yú)塘溶解氧檢測(cè)系統(tǒng)
223線陣CCD高精度測(cè)隙裝置的研制
44基于STC單片機(jī)的車(chē)輛實(shí)時(shí)檢測(cè)系統(tǒng)
207
{kind=link}
基于USB的線陣CCD圖像采集系統(tǒng)
156基于線陣CCD的角度測(cè)量方法
75基于線陣CCD攝像機(jī)的車(chē)輛檢測(cè)技術(shù)
92線陣CCD驅(qū)動(dòng)時(shí)序及模擬信號(hào)處理的設(shè)計(jì)
148基于線陣CCD的尺寸測(cè)量研究
153基于CPLD的線陣CCD數(shù)據(jù)采集系統(tǒng)的開(kāi)發(fā)
1773
基于AVR單片機(jī)的流量檢測(cè)系統(tǒng)設(shè)計(jì)
100基于ATMega16L單片機(jī)的TCD1208AP線陣CCD接口設(shè)計(jì)
214基于線陣CCD掃描的車(chē)輛圖像采集系統(tǒng)設(shè)計(jì)
0基于單片機(jī)的溫度檢測(cè)系統(tǒng)
16基于單片機(jī)的電池容量檢測(cè)與智能充電系統(tǒng)
58線陣LED
32基于線陣CCD的智能小車(chē)路徑識(shí)別系統(tǒng)
12利用單個(gè)線陣CCD相機(jī)輸送帶圖像的采集方法
6單片機(jī)應(yīng)用系統(tǒng)開(kāi)發(fā)實(shí)例
2115份描述CCD驅(qū)動(dòng)的文獻(xiàn)資料合集免費(fèi)下載
16基于CPLD驅(qū)動(dòng)電路實(shí)現(xiàn)線陣CCD的驅(qū)動(dòng)設(shè)計(jì)
3795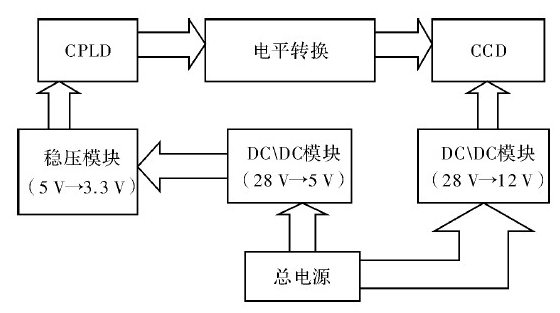
CCD驅(qū)動(dòng)電路的4種常用方式介紹和使用單片機(jī)設(shè)計(jì)CCD驅(qū)動(dòng)電路的說(shuō)明
28如何使用線陣CCD實(shí)現(xiàn)圖像采集詳細(xì)論文說(shuō)明
24高速線陣CCD IL-P1-4096的主要特點(diǎn)、引腳功能和應(yīng)用分析
6381
基于AT89S51單片機(jī)的SPI與線陣CCD接口設(shè)計(jì)
3138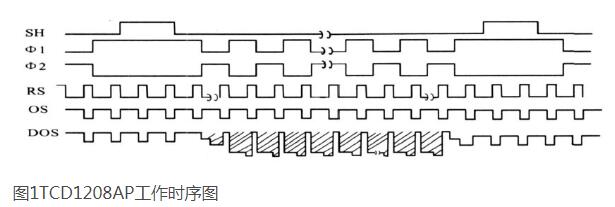
采用EPM7064S芯片和TMS320F2812芯片實(shí)現(xiàn)線陣CCD檢測(cè)系統(tǒng)的設(shè)計(jì)
3292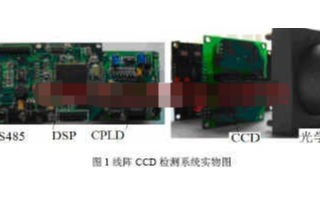
基于TCD142D線陣CCD和時(shí)序發(fā)生器實(shí)現(xiàn)CCD數(shù)據(jù)采集電路的設(shè)計(jì)
5871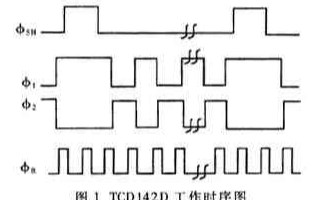
基于CPLD工作模式可調(diào)的線陣CCD驅(qū)動(dòng)電路的設(shè)計(jì)講解
9基于CPLD工作模式可調(diào)的線陣CCD驅(qū)動(dòng)電路的設(shè)計(jì)講解
2551單片機(jī)ad電壓采集實(shí)驗(yàn)_基于單片機(jī)的心率體溫檢測(cè)系統(tǒng)設(shè)計(jì)
60基于單片機(jī)水溫檢測(cè)控制和報(bào)警系統(tǒng)設(shè)計(jì)
19【畢設(shè)狗】【單片機(jī)畢業(yè)設(shè)計(jì)】基于單片機(jī)的教室人數(shù)實(shí)時(shí)檢測(cè)系統(tǒng)的設(shè)計(jì)(proteus仿真+源碼+原理圖+軟件設(shè)計(jì)
13基于單片機(jī)的雨量檢測(cè)系統(tǒng)設(shè)計(jì)Proteus仿真資料包
59基于單片機(jī)的水塔水位檢測(cè)系統(tǒng)
48基于單片機(jī)的汽車(chē)檢測(cè)換氣系統(tǒng)Proteus仿真
38單片機(jī)應(yīng)用系統(tǒng)的開(kāi)發(fā)流程
7677LTC1606工作原理及其在線陣CCD系統(tǒng)中的應(yīng)用
1線陣CCD尺寸測(cè)量信號(hào)的提取案例
0PC機(jī)與多臺(tái)單片機(jī)實(shí)時(shí)通信系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
451單片機(jī)88點(diǎn)陣LED顯示原理
3一種基于線陣CCD掃描的車(chē)輛圖像系統(tǒng)的方案設(shè)計(jì)
0線陣ccd和面陣ccd區(qū)別
2486- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論