 MIT推出人形機器人“愛馬仕” 遠程遙控操作救援
MIT推出人形機器人“愛馬仕” 遠程遙控操作救援

你是不是也做過機動戰士高達夢,幻想過將人類意識植入機器?
麻省理工學院近日推出了人形機器人Hermes,它可以通過遙控操作實現靈活移動。
研究人員希望它可以代替人類去執行搜索和營救任務。在面對極度危險的環境時,操縱者可以通過頭戴顯示器以第一人稱視角進行操作。
悲劇敲響的警鐘:救援機器人的重要性
2011年日本大地震和海嘯造成的福島第一核電站的災難為我們敲響了警鐘。在災難中,高危輻射阻止了工人采取緊急措施,他們甚至無法操作壓力閥。這個任務其實交給機器人完成是最適合的,但在當時日本或世界的其他地方都沒有能力使之變成現實。
福島災難讓機器人學社區的許多人意識到,救援機器人需要從實驗室走到世界各地。
此后,救援機器人開始不斷取得重大進展。世界各地的研究小組已經展示了可以行駛在碎石中的無人地面車輛,可以擠過狹窄間隙的機器人蛇,以及在天上繪制站點的無人機。研究人員還在建造仿生機器人,可以測量損壞情況并執行關鍵任務,例如使用儀表盤或運輸急救設備。
盡管取得了進步,但是打造跟應急工作人員具備一樣運動和決策能力的機器人仍然是一個挑戰。推開沉重的門,卸下滅火器,以及其他簡單但艱巨的工作需要的一定的協調能力,還沒有能制造出掌握這種能力的機器人。
把人腦放在機器里面
理想的救援機器人應該是靈活而自主性很強的。比如能夠自主進入燃燒的建筑物中找到受害者,或者在受損的工業設施中找到需要關閉的閥門。
但是災難現場是不可預測的,行走在這些復雜的環境中需要高度的適應性,而目前的救援機器人還無法做到。如果自主機器人遇到門把手,但在門把手數據庫中找不到匹配,任務失敗。如果機器人手臂卡住并且不知道如何自救,任務失敗。
人類可以輕松應對這種情況:我們可以隨時適應和學習,我們可以辨別物體形狀的變化,應對糟糕的能見度,可以在現場臨時學會如何使用新工具。我們的運動技能也是如此。比如負重跑步的時候,我們可能會跑得慢一些或者沒那么遠,但仍然可以跑,我們的身體可以輕松地適應新的變化。
把人腦放到機器里不就可以了嗎?
針對這個短板的一種解決方案是使用遠程操作,即讓操作人員連續地或在特定任務期間遠程控制機器人,以幫助其完成超出自身能力的操作。
遙控機器人長期以來一直用于工業、航空航天和水下環境。最近,有研究人員已經嘗試使用動作捕捉系統將人的動作實時轉移到仿生機器人:你揮動手臂,機器人模仿你的姿勢。為了獲得完全身臨其境的體驗,特殊的護目鏡可以讓操作員通過相機看到機器人看到的東西,觸覺背心和手套可以為操作員的身體提供觸覺。
在麻省理工學院的仿生機器人實驗室,研究團隊正在進一步推動人機融合,開發遙操作系統,希望加速實操型救援機器人的發展。他們正在建立一個遙控機器人系統,由兩個部分組成:一個能夠靈活、動態行為的仿生機器人,以及一種新的雙向人機界面,可以將人和機器人的動作互相傳遞。
通過將機器人與人類聯系起來,研究者充分結合了兩者的優勢:機器人的耐力和力量,以及人類的多功能性和感知力。如果機器人踩上碎片并開始失去平衡,操作員會感覺到同樣的不穩定性并本能地做出反應以避免跌落。然后捕獲該物理反應并將其發送回機器人,這有助于避免機器人墜落。通過這種人機交互,機器人可以利用操作員的先天運動技能和瞬間反應來保持站立。
比之前的仿生機器人進步在哪
現有機器人的一個特殊限制是它們無法執行我們所說的力量操縱 ,即費力的技能,比如將一大塊混凝土敲開或將斧頭揮舞向一扇門。大多數機器人只能進行一些精細和精確的動作。
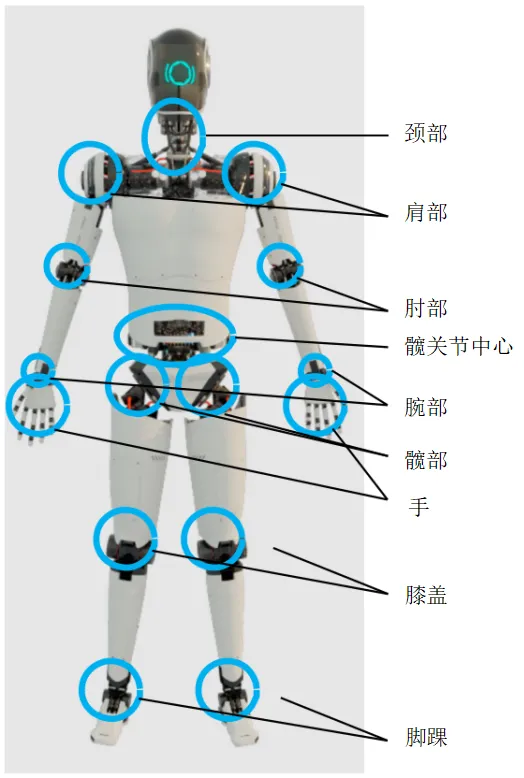
而MIT實驗室推出的仿生機器人HERMES可以進行重型操縱。該機器人重量只有45公斤, 但是強壯有力。它的身型大約是普通人體的90%,這足以讓它在人類環境中自然地演習。
為HERMES的關節提供動力的是定制執行器而不是使用常規直流電機,執行器包括將無刷直流電機融合到行星齒輪箱,這樣取名是因為它的三個“行星”齒輪圍繞“太陽”齒輪旋轉,這可以為它們的重量產生大量的扭矩。機器人的肩部和臀部直接驅動,而膝蓋和肘部由連接到執行器的金屬桿驅動。這使得HERMES比其他仿生機器人更靈活,能夠吸收機械沖擊而不會使齒輪摔成碎片。
控制HERMES的人機界面也不同于傳統,它是依賴于操作員的反應來提高機器人的穩定性,被稱為平衡反饋界面,簡稱BFI。BFI需要數月和多次迭代才能開發,最初的概念與2018年史蒂文?斯皮爾伯格執導的電影《頭號玩家》中的全身虛擬現實服裝有一些相似之處。
具體實驗檢測
與HERMES合作的時候,操作員站在一個邊約90厘米的正方形平臺上,由稱重傳感器測量平臺表面的力,由此判斷操作員的腳向下推的位置。一組連桿附著在操作員的四肢和腰部,并使用旋轉編碼器精確測量一厘米的范圍內的位移。連桿不僅用于傳感,其中還裝有電機,用于向操作員的軀干施加力和扭矩。被綁在BFI上的時候這些連桿可以為操作員的身體施加推力。
研究人員準備了兩***立的計算機來控制HERMES和BFI。每臺計算機都有自己的控制回路,雙方不斷交換數據。在每個回路開始時,HERMES收集自己的姿勢數據,并將其與從BFI獲得的有關操作員姿勢的數據進行比較。根據兩者的不同,機器人調整其執程序,并將新的姿勢數據立即發送給BFI。然后BFI也執行類似的控制回路來調整操作員的姿勢。如此重復,每秒執行1,000次。
為了使雙方能夠高速運作,必須壓縮它們之間交換的信息。例如,BFI不會發送操作員姿勢的詳細數據,僅僅發送操作員的重心位置及其手腳的相對位置。然后,控制機器人的計算機將這些測量數據與HERMES的尺寸進行成比例地縮放,再由HERMES重現該參考姿勢。
與任何其他的雙向遙控操作回路一樣,BFI和HERMES間的耦合可能導致振蕩或不穩定,通過微調人體和機器人姿勢間映射的縮放參數來使這種振蕩或不穩定最小化。
在最初的實驗中,研究人員給HERMES使用了早期平衡算法,以了解人類和機器人一起的行為方式。在測試中,一位研究人員使用橡皮錘擊打HERMES的上半身。每次打擊,BFI都會對研究人員自身也產生沖擊,他會習慣性地側轉身體以找回平衡,機器人也能保持平衡。
在另一輪實驗中,HERMES做到了揮動斧頭和劈開石膏墻板。還在當地消防部門的監督下,實現用滅火器救火。救援機器人需要的不僅僅是蠻力,因此HERMES和還執行了一些需要更多靈活性的任務,比如用水壺往杯子中倒水。
在每種情況下,當佩戴BFI的操作員模擬執行任務時,研究人員觀察機器人執行這些相同動作的到位程度,記錄了操作員的哪些反應能幫助機器人更好地做動作。例如,當HERMES劈石膏墻板時,它的軀干會向后反彈。幾乎同時,BFI將類似的推力作用于操作員,他會習慣性地向前傾斜身體,從而也幫助了HERMES調整姿勢。
Little HERMES來助力
因為HERMES體型對于一些實驗來說還是太大了,而且能力也過強。雖然HERMES可以執行實際的任務,但要移動它也很耗時,而且要讓它動起來還要多加小心,因此研究人員給HERMES弄了個小兄弟。
Little HERMES是HERMES的縮小版。像它的大哥HERMES一樣,Little HERMES也使用定制的高扭矩執行單元,裝在靠近身體的地方而不是腿上,這樣做可以使腿部擺動更靈活。要做到更緊湊的設計,用機器人術語來說,就是減少了運動軸或自由度的數量,每個肢體上從六個減到三個,并且用簡單的橡膠球替換HERMES的兩趾腳,每只腳都裝有一個三向力傳感器。
將BFI與Little HERMES連接需要進行調整。人類成年人和這個小型機器人的體型存在很大差異,因此當研究人員無法將兩者的動作直接進行關聯,比如將人膝蓋的位置和機器人膝蓋的位置相對應等等,會導致機器人運動很不平穩。
Little HERMES需要的是一個與HERMES不同的數學模型,在新的模型中研究人員加入了跟蹤參數,如地面接觸力和操作員的重心。這使得新模型可以預測操作員打算做的動作,從而控制Little HERMES執行這些動作。
在一次實驗中,操作員一步一步地先慢走,然后再加快速度快走,可以看到Little HERMES也以同樣的方式走路。當操作員跳起時,Little HERMES也跳了起來。現在仍然是初步進展階段,Little HERMES還不能自由站立或四處走動。
研究人員還在進一步擴展它的功能,希望讓它可以在實驗室里漫步,甚至可以去戶外,就像已經完成的另一對兄弟Cheetah和Mini Cheetah一樣。
下一步研究目標
接下來還有一系列難題需要解決。一是操作員在長時間使用BFI或高度集中注意力的任務后導致的疲勞問題。實驗表明,當操作員不僅要指揮自己的身體而且指揮機器的時候,大腦會快速疲勞。這對于需要精細操作的任務尤其明顯,在連續三次重復實驗后,操作員就必須休息一下。
目前解決方案是讓操作員和控制器共同負責穩定機器人的動作。如果HERMES正在執行的任務需要操作員更多的注意力,那么操作員就不必協助保持機器人平衡,自主控制器可以接管機器人的平衡控制。要識別此類情形的一種方法是跟蹤操作員的目光注視。操作員目光的凝視表示其注意力的高度集中,在這種情況下,自主平衡模式就會啟動。
就像任何遠程操作系統一樣,另一個難題是傳輸延遲。當遠程控制機器人時候,如果發出的命令和機器人的反應之間有1秒的延遲,仍然可以遠程操作它,但如果延遲變得更久,可能就無法順利進行操作。目前的計劃是依靠新的無線技術,如5G,從而保證低延遲和高吞吐量的傳輸。
最后,研究人員還正在打算將實驗室開發的直立機器人Cheetah和HERMES的技術合并,產生一個可快速移動的四足機器人,可以用四條腿快速進入災難現場,還可以變形為一個直立機器人,這樣救災人員就可以利用自己豐富的經驗技能和反應讓機器人開展救援任務。
-
機器人
+關注
關注
213文章
31073瀏覽量
222188 -
人工智能
+關注
關注
1817文章
50094瀏覽量
265298 -
MIT
+關注
關注
3文章
254瀏覽量
24996
原文標題:真·人機合一!MIT推出人形機器人“愛馬仕”,遠程遙控操作救援
文章出處:【微信號:BigDataDigest,微信公眾號:大數據文摘】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
歐菲光推出人形機器人視覺感知產品架構組合方案
【應用方案】全場景落地!艾為芯讓人形機器人更“懂”世界

特斯拉Optimus百人團隊采集訓練數據,人形機器人仍全靠遙控?

國民技術亮相2025人形機器人國際峰會

深度解讀人形機器人電感產品需求及應用選型技巧
最新發布!泰科機器人發布首款自研雙足人形機器人

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
發力人形機器人賽道,傅利葉重磅推出陪伴機器人GR-3

藍思科技:今年承接智元機器人全系列多款人形機器人業務
全國首屆人形機器人線纜技術研討會圓滿召開!
NVIDIA助力構建人形機器人全身遙操作仿真平臺
開源鴻蒙助力人形機器人產業發展
EtherCAT科普系列(4):EtherCAT技術在人形機器人靈巧手領域應用

中科本原推出面向人形機器人的關節電機解決方案



 工商網監
工商網監
評論