") 中科本原推出面向人形機器人的關節(jié)電機解決方案
中科本原推出面向人形機器人的關節(jié)電機解決方案

在人工智能與高端制造的浪潮中,人形機器人正從科幻想象加速邁向現(xiàn)實。從特斯拉Optimus的工廠分揀到優(yōu)必選Walker的養(yǎng)老陪護,人形機器人憑借類人形態(tài)與智能交互能力,正在工業(yè)、醫(yī)療、家庭服務等領域掀起革命。而這一變革的核心驅(qū)動力,正藏匿于機器人的“運動心臟”——關節(jié)電機。
人形機器人新浪潮:開啟智慧新時代
高盛研究部指出,全球人形機器人產(chǎn)業(yè)正加速邁向全方位生態(tài)系統(tǒng)的成熟。在基本情景假設下,迅速增長的市場需求預計到2035年將釋放高達380億美元的潛在市場空間。此外,鑒于人形機器人仍處于早期發(fā)展階段,并存多種技術路徑,高盛預測行業(yè)競爭格局將持續(xù)演進,不斷推動技術創(chuàng)新與產(chǎn)業(yè)升級。
工信部印發(fā)《人形機器人創(chuàng)新發(fā)展指導意見》,明確指出,人形機器人有望成為繼計算機、智能手機、新能源汽車后的顛覆性產(chǎn)品。到 2025 年,人形機器人創(chuàng)新體系初步建立,“大腦、小腦、肢體”等一批關鍵技術取得突破,確保核心部組件安全有效供給。到 2027 年,人形機器人技術創(chuàng)新能力顯著提升,形成安全可靠的產(chǎn)業(yè)鏈供應鏈體系,構建具有國際競爭力的產(chǎn)業(yè)生態(tài),綜合實力達到世界先進水平。
關節(jié)電機:賦予人形機器人生命之動
在人形機器人系統(tǒng)中,關節(jié)電機承擔著至關重要的作用,是實現(xiàn)機器人靈活運動和高精度操控的核心驅(qū)動單元。作為“智能關節(jié)”,關節(jié)電機直接決定了機器人關節(jié)的運動性能、能效水平以及整體協(xié)作能力,其技術水平直接影響人形機器人的應用廣度和發(fā)展前景。
宇樹旗下的G1通用人形機器人,可實現(xiàn)720度回旋踢和多種武打動作。G1機器人單腿自由度為6,單手臂的自由度為5,單手自由度為7,可選手腕自由度為2,共用23-43個關節(jié)電機模組。
云深處旗下山貓全地形機器人在傳承云深處在具身智能方面的技術積累的同時,基于"山貓"的形態(tài)針對性進行特色化適配,在特殊地形下表現(xiàn)優(yōu)異,如樓梯、斜坡、石板路、碎石路穿越。山貓全地形機器人共用12個關節(jié)電機模組。
中科本原推出面向人形機器人的關節(jié)電機解決方案
BenYuan關節(jié)電機采用了一體化設計方式,包含了無框力矩電機、行星減速器、驅(qū)動器、編碼器、鋁合金傳動件及外殼。電機整體重量為378g,尺寸為?80*40。
電機參數(shù)
BenYuan關節(jié)電機額定扭矩為5N·m,峰值扭矩為11N·m,提供了更強大的承載能力和更迅速的動態(tài)響應。額定轉(zhuǎn)速120rpm與最大轉(zhuǎn)速420rpm提高了機器人運動的靈活性。此外,板載編碼器精度達到了16bit,提高了關節(jié)角度控制的精準度。更多參數(shù)詳情見下表1。這些參數(shù)共同作用,使關節(jié)電機能夠滿足不同應用場景需求,為人形機器人提供更自然、更高效的運動能力,助力其在工業(yè)、醫(yī)療、服務等領域?qū)崿F(xiàn)廣泛應用。
| 額定電壓 | 24 VDC |
| 額定電流 | 10.5A |
| 額定轉(zhuǎn)速 | 120 rpm±10% |
| 額定扭矩 | 5 N.m |
| 相間電阻 | 0.48Ω±10% |
| 扭矩常數(shù) | 0.47N.M/A |
| 重量 | 378g±3g |
| 減速比 | 8:1 |
| CAN通信波特率 | 1Mbps |
| 使用溫度范圍 | -20~50℃ |
| 使用濕度范圍 | 5~85%,無凝露 |
表1 FDM關節(jié)電機參數(shù)詳情
驅(qū)動板介紹
關節(jié)電機驅(qū)動板是連接控制系統(tǒng)與電機的關鍵部件,負責接收控制信號、驅(qū)動電機運轉(zhuǎn),并實現(xiàn)精準的扭矩、速度和位置控制。作為人形機器人關節(jié)電機的核心驅(qū)動模塊,其性能直接影響機器人的運動流暢度、響應速度和能耗效率。
BenYuan關節(jié)電機內(nèi)部集成了一款自研的關節(jié)電機驅(qū)動板。驅(qū)動板以FDM320R035高性能數(shù)字信號處理器為核心,搭建了一套高效電機驅(qū)動方案,能夠?qū)崿F(xiàn)穩(wěn)定的電機控制。該驅(qū)動板專為高精度伺服系統(tǒng)設計,具備強大的計算能力、精準的電流采樣與驅(qū)動能力,為人形機器人等高端應用提供可靠的動力支持。
核心控制單元采用FDM320R035,具備強大的數(shù)據(jù)處理能力,能夠高速執(zhí)行磁場定向控制(FOC)算法,實現(xiàn)電機的高精度扭矩、速度和位置控制。其高速運算能力確保機器人關節(jié)運動平穩(wěn)流暢,提高動態(tài)響應速度和能效。整體控制框架見圖5。
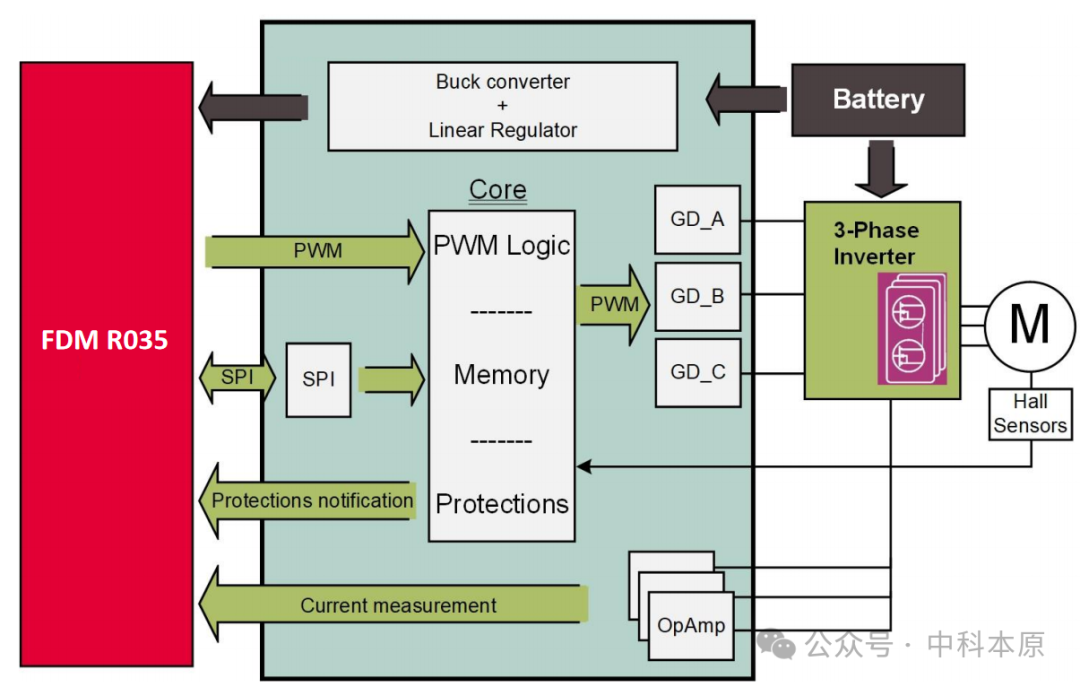
圖5 FDM關節(jié)電機驅(qū)動器框架 該關節(jié)電機驅(qū)動器板卡如圖6所示:
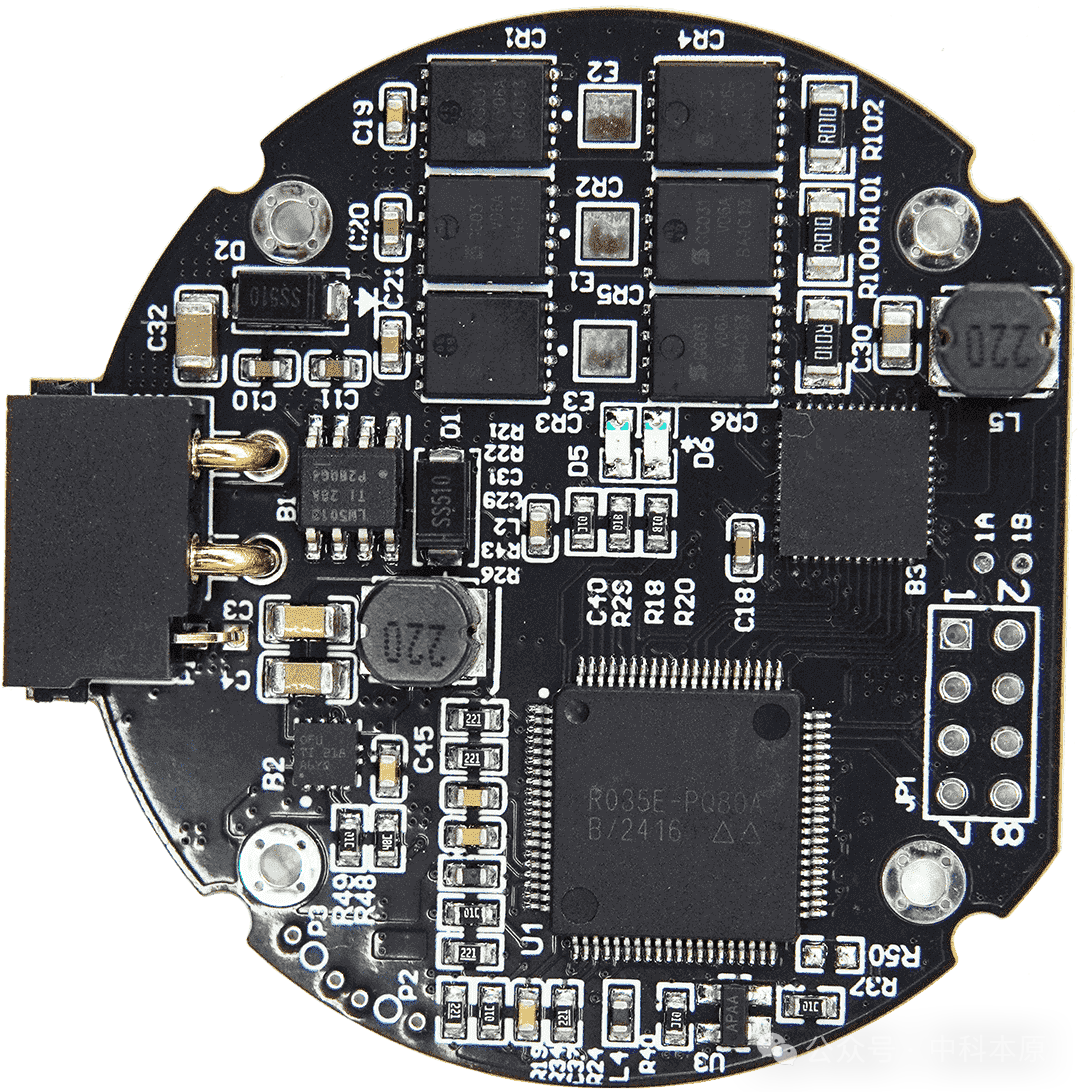
圖6FDM關節(jié)電機驅(qū)動器板卡
驅(qū)動算法介紹
在機器人關節(jié)控制中,傳統(tǒng)的位置控制能夠?qū)崿F(xiàn)精準的軌跡跟蹤,但在涉及人機交互、復雜環(huán)境適應、精密裝配等應用時,僅靠位置控制難以滿足柔性、安全和適應性的需求。因此,BenYuan關節(jié)電機采用了基于FOC的力位混合控制,用于平衡剛性控制與柔性控制的需求。
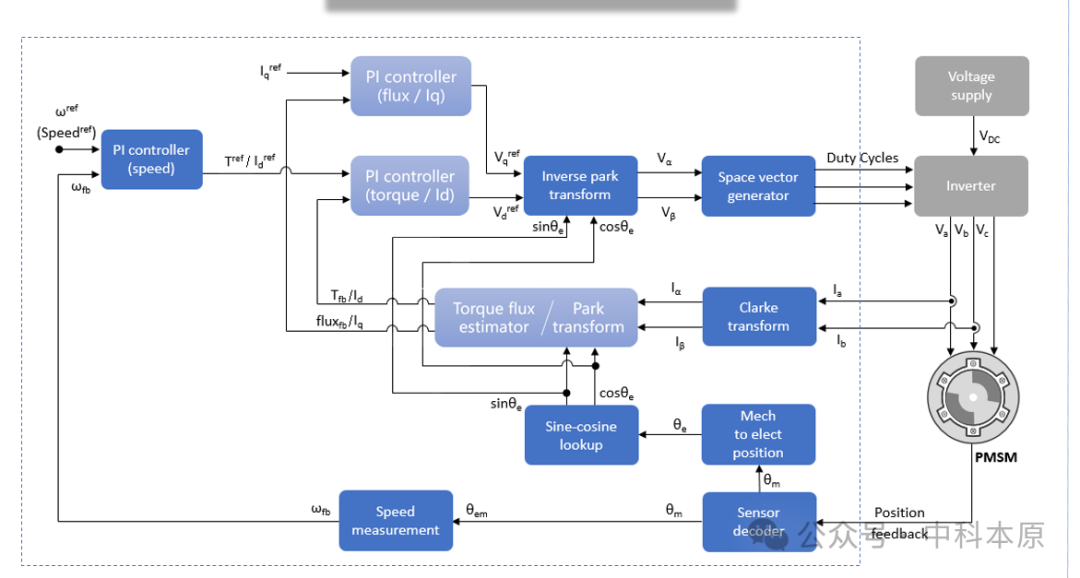
圖7 控制算法框圖
核心思想是通過數(shù)學變換,將三相電流轉(zhuǎn)換為直流分量,隨后使用PD控制器將電機在位置上的偏差反饋到力矩輸出上,實現(xiàn)更精確的扭矩、速度和位置控制,同時提高效率并減少能耗。
BenYuan關節(jié)電機包含以下 5 個控制指令:
1)前饋力矩:
2)目標角度位置:
3)目標角速度:
4)位置剛度:
5)速度剛度:
在力位混合控制中,使用PD控制器將電機在輸出位置的偏差反饋到力矩輸出上:
公式中,為關節(jié)電機的電機轉(zhuǎn)子輸出力矩;為當前電機轉(zhuǎn)子的角度位置;為當前電機轉(zhuǎn)子的角速度。
除算法外,我們還提供簡單易用的上位機和豐富的API以方便用戶調(diào)試和進行系統(tǒng)集成調(diào)用。
總之,我們提供了從芯片、關節(jié)電機驅(qū)動器和算法的完整解決方案,為用戶的機器人產(chǎn)品開發(fā)提供全方位服務。
關節(jié)電機演示
以下是關節(jié)電機的正弦自動化測試:

從工廠到家庭:關節(jié)電機驅(qū)動智能未來
隨著機器人技術的發(fā)展,關節(jié)電機作為核心驅(qū)動部件,正推動人形機器人從工業(yè)場景走向更廣闊的應用空間。無論是在智能制造、醫(yī)療康復、物流搬運,還是未來的家庭服務、教育陪伴領域,先進的關節(jié)電機都在賦予機器人更高的靈活性、精準性和智能性,為人類社會帶來深遠變革。在工業(yè)領域,BenYuan關節(jié)電機可廣泛應用于智能工廠。傳統(tǒng)工業(yè)機器人多采用剛性傳動,而BenYuan關節(jié)電機結合力控和位置控制技術,使機器人能在復雜環(huán)境中柔順作業(yè),適應柔性制造的需求。此外,高扭矩密度和精準控制能力的特點,使得BenYuan關節(jié)電機能處理更精細的操作,例如電子元件裝配、汽車制造等高要求場景。
然而,BenYuan關節(jié)電機的應用并不止步于工廠。隨著人形機器人正加速進入家庭場景,成為未來智能助手。家用機器人需要在復雜環(huán)境中自主移動、執(zhí)行多任務操作,如協(xié)助家務、照顧老人、陪伴兒童等。相比傳統(tǒng)電機,本原關節(jié)電機具備更輕量化、更高效的特性,使家庭機器人擁有接近人類的自然動作能力。例如,BenYuan關節(jié)電機可實現(xiàn)機器人輕松完成精細抓取,安全地與人互動,而不會造成誤傷。
在醫(yī)療康復領域,外骨骼機器人和康復機器人依賴關節(jié)電機提供穩(wěn)定的輔助力,幫助患者進行康復訓練或增強行動能力。高精度的力矩控制和響應速度,使這些機器人能夠適應不同患者的需求,提供更個性化、更安全的康復體驗。
從工廠的高效生產(chǎn)到家庭的智能陪伴,關節(jié)電機正在驅(qū)動人形機器人從工業(yè)向生活延伸,塑造未來的智能世界。隨著技術不斷突破,機器人將更加靈活、智能、安全,讓智能生活真正走進千家萬戶。
-
電機
+關注
關注
143文章
9568瀏覽量
153893 -
人工智能
+關注
關注
1816文章
50053瀏覽量
264543 -
人形機器人
+關注
關注
7文章
957瀏覽量
18450
原文標題:智驅(qū)仿生,賦能人形——關節(jié)電機創(chuàng)新方案
文章出處:【微信號:中科本原,微信公眾號:中科本原】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
人形機器人關節(jié)模組關鍵技術解析,及產(chǎn)業(yè)鏈上游電機/傳感器企業(yè)一覽

人形機器人開發(fā)觀察:如何搞定全身40+關節(jié)的亞毫秒級同步控制?

瑞可達連接器產(chǎn)品組合助力人形機器人產(chǎn)業(yè)升級
人形機器人一體化關節(jié):如何解決高動態(tài)工況下的“測不準”?

黑芝麻智能推出面向機器人產(chǎn)業(yè)的SesameX多維智能計算平臺
高性能人形機器人關節(jié)模組選型的關鍵技術要素

最新發(fā)布!泰科機器人發(fā)布首款自研雙足人形機器人

人形機器人關節(jié)電機:永磁電機類型解析

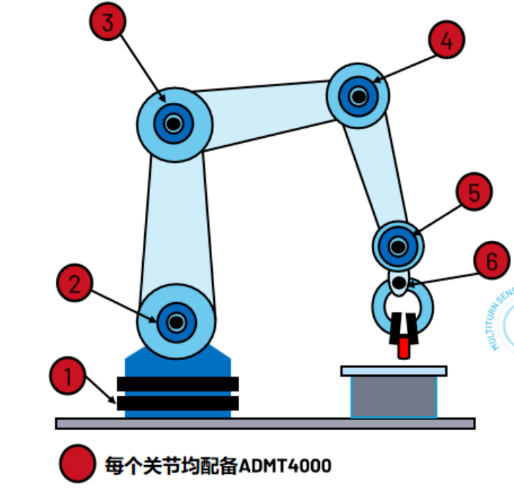
ADI ADMT4000磁性位置傳感器助力人形機器人關節(jié)設計
藍思科技:今年承接智元機器人全系列多款人形機器人業(yè)務
人形機器人之26家電機制造商盤點
102.85Nm/kg扭矩密度突破!無框力矩電機如何定義人形機器人關節(jié)性能極限
關節(jié)電機驅(qū)動,解鎖智能機器人 的“靈動” 密碼

人形機器人設計中,哪些關鍵部位需要功率器件?典型電壓/電流參數(shù)如何設計?
人形機器人深度解析



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論