 2018年DMV自動駕駛脫離報告出爐
2018年DMV自動駕駛脫離報告出爐

近日,加州機動車管理局(DMV,Department of Motor Vehicles) 公布了 2018年度的自動駕駛年度成績單。共有48家公司提交報告,這些報告呈現了他們在 2017 年 12 月 1 日到 2018 年 11 月 30 日之間的自動駕駛路測成果。該報告的重點即為“脫離”(Disengagement)二字,本文也就“脫離”原因進行了分析。
美國加州是是全球第一個為自動駕駛車輛路測制定法規的地區,吸引了眾多整車廠、供應商、及自動駕駛初創公司在此進行自動駕駛研發和路測。截止2019年2月13日,已經有62家公司持有加州有效的許可證。
從 2015 年起,對于自動駕駛測試,加州機動車管理局(DMV,Department of Motor Vehicles)要求獲得自動駕駛路測資質的公司每年1月1日之前都要上交一份自動駕駛“年度報告”,總結測試過程中所經歷的所有自動駕駛脫離Disengagement事件,這些“自動駕駛脫離報告”(下文簡稱“脫離報告”)。
該報告的重點即為“脫離”(Disengagement)二字,以此來衡量自動駕駛技術的成熟度。
加州DMV對“脫離”Disengagement的應用場景作了兩重定義:
1)被動脫離PDE (Passive Disengagement)
當自主駕駛相關技術檢測到故障無法繼續執行時,自動駕駛模式被迫退出、斷開控制,且要求駕駛員立即人工接管。
2)主動脫離 ADE (Active Disengagement)
自動駕駛控制系統未檢測到任何故障,但駕駛員監控運行工況時為保證車輛安全行駛采取人工干預,主動觸發自動駕駛模式的退出,實現對車輛的手動接管控制。
前者要求自動駕駛系統需要有完整的診斷機制,后者是對高階自動駕駛車輛測試員的要求,即自動駕駛測試員需要根據自身的判斷對車輛進行介入,手動控制車輛。
除此以外報告里面的要求評判維度有:
總的系統脫離報告
脫離時的環境和測試條件
當時的位置和環境(比如高速路、鄉村道路和停車設施)
氣候條件、道路環境的簡要介紹
總的每臺車的在公共道路條件下所行駛的里程
自動駕駛提示報警到駕駛員接管的時間間隔
在DMV公布的測試報告里,每家公司實際提供的信息都有差異,匯總這前家公司脫離報告中的關鍵數據如下表:
近日,DMV 公布了 2018年度的自動駕駛年度成績單。共有48家公司提交報告,這些報告呈現了他們在 2017 年 12 月 1 日到 2018 年 11 月 30 日之間的自動駕駛路測成果。

這里匯總提供路測數據的25家公司脫離報告中的關鍵數據如下表:
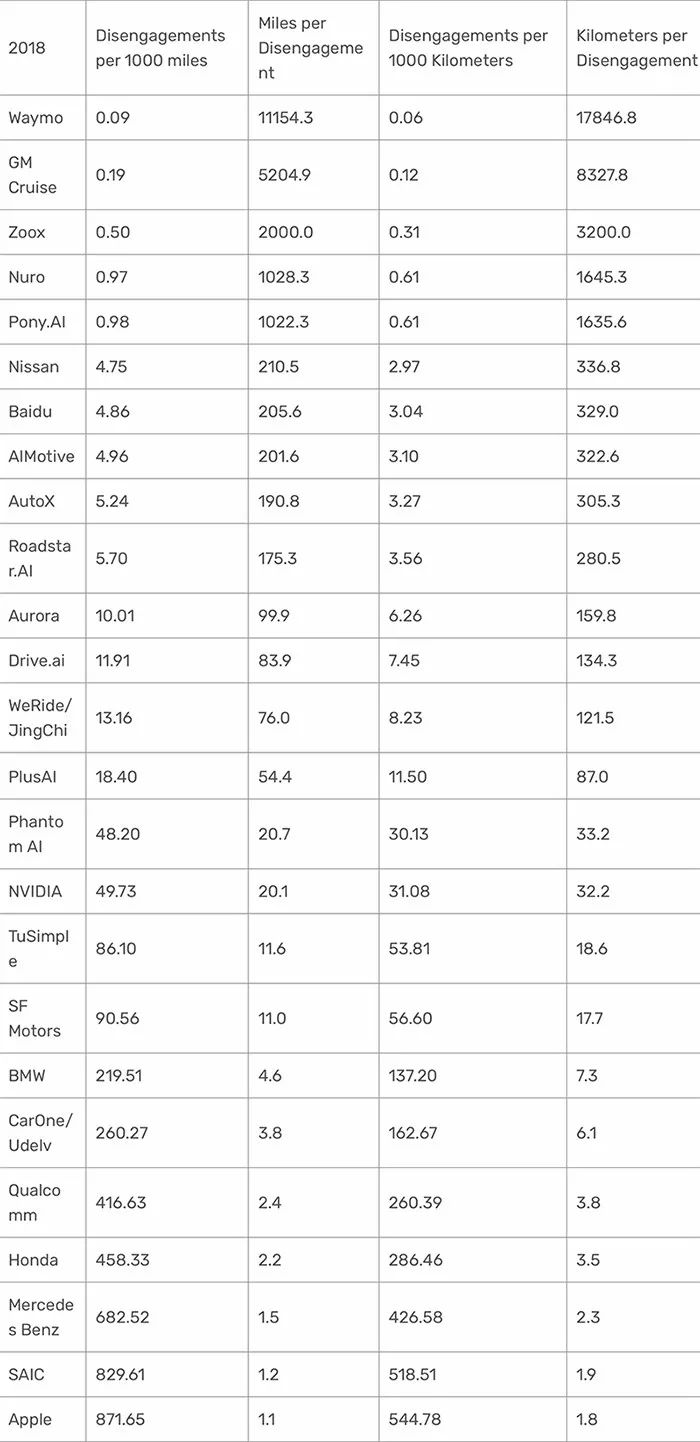
從圖表的數據對比能夠看出來,在加州的自動駕駛的路測方面,谷歌的MPI (Miles Per Intervention)仍然處于領先水平,不僅測試里程數達到1,271,587英里,而且“脫離”次數為114次,即每11154英里需要人工干預一次。
從圖表中可以看出蘋果公司的MPI很低,即每1000英里的脫離數量為871.65次,大約每1.1英里就有一次脫離。
當然,也有觀點認為,這份報告并不能全面體現各家廠商的自動駕駛研究進展,脫離次數還受到很多其他方面的影響,并且有的公司并不只在加州這一個地方進行測試,評價一個公司的自動駕駛技術高低的數據總量及數據維度并不全面。
很多廠商,例如通用,包括谷歌等,除了在加州境內測試,也在密歇根州、亞利桑那州和內華達州等等其他州或者國家進行自動駕駛路測。
其次,測試道路類型不同,對自動駕駛的難度要求也不同,像博世集團的測試道路就包括了城市道路、街道、鄉村道路等復雜路況,而像通用、奔馳、日產的測試道路也基本集中在城市道路和街區道路等非標準道路。
最后,路測的數據來源也會不同,特斯拉在報告中指出,其雖然沒有在加州進行大量道路測試,但是其在全球的仿真裝置、實驗室、測試車道和公路上進行了測試工作,目前已經收集了逾10億英里Autopilot開啟時的行車數據,這使得它掌握有大量實際路況中的行車數據。
但鑒于自動駕駛相關測試指標的多樣性,路況的復雜性,加州的年度報告可能不能全面覆蓋,但是加州作為批復路測資質最多的城市,其提供的數據樣本在目前所有允許自動駕駛測試的地區當中還是最為完整的。
僅就加州的脫離次數報告,既然這里脫離是這份報告的重點,那么下面我們我們討論一下自動駕駛功能脫離的原因,希望能給大家啟發。
自動駕駛功能脫離的主要原因分析
環境因素對自動駕駛車輛運行至關重要。在不同環境條件下(包括不同的地點、天氣、路面類型等因素)實現全自主駕駛,要求自動駕駛技術足夠的智能與魯棒,以處理所有可能遇到的運行工況。脫離報告中所涉及的道路環境狀況綜述如下:
1)地點:街道、州際公路、高速公路、鄉村道路、停車場。
2)天氣:晴朗、多云、雨天、晴朗夜晚 。
3)路面狀況:干燥、潮濕、有洞或凸起等不佳狀況路面,車道線不清晰,路面交通標記褪色不清,以及新鋪路面。
諸多因素會影響自動駕駛控制,并導致功能退出。這些原因包括(但不限于)如下。
不同類型自動駕駛退出的誘因
被動退出 PDE的典型原因
1)硬件問題
硬件元器件失效或未按預期執行工作,一些典型的報告原因如下:車輛控制器發生故障;傳感器、導線、執行機構和其他物理設備損壞。
2)軟件問題
軟件故障涵蓋了環境感知、物體識別、車輛定位、決策、路徑規劃、軌跡生成、縱橫向控制等諸多方面的問題。報告的一些典型原因包括:錯誤識別了障礙障礙物;另一輛車從側面接近但未被感知;識別系統失去了前車軌跡;目標路徑生成失敗;定位故障等等。
3) 天氣條件
測試過程中出現的天氣條件因素導致自動駕駛功能退出,典型原因例如:照明條件差導致交通信號燈檢測故障;陽光過強導致對象檢測失敗;雨、雪、霧等導致能見度差;過熱或過冷的溫度,等等。
4) 路面條件
由于路面狀況不佳,導致自動駕駛功能關閉,典型原因例如:道路有洞或凸起;褪色的路面標記、剛鋪好的路面,等等。
主動退出ADE的典型原因
主動退出的典型原因包括軟件限制、硬件問題、遇有緊急情況和預防性人工干預等。詳細描述和相關的示例案例如下。
1)軟件的局限性
雖然自動駕駛系統沒有檢測到故障,但由于其自身能力限制無法處理復雜情況下的高級駕駛任務,或由于軟件的限制而導致的物體感知、車輛的軌跡、行為等不理想,使得人工主動介入干預,導致自動駕駛功能退出。一些典型的案例如:在擁擠交通環境下換道;十字路口過多行人和車輛使得自主系統難以決策控制;自動駕駛車輛過于靠近停著其他車輛;未識別停止的前車,未能有效減速,于是司機主動接管,采取制動操作,等等。
2)硬件問題
硬件故障使得司機感到需要立即人工干預控制車輛。
3)緊急情況
緊急情況下,駕駛員出于安全性的考量主動接管車輛的控制權限。典型案例包括:出現急救車輛(為了解決此問題,谷歌提出了一個檢測和應對緊急車輛的方法);道路出現交通事故,等等。
4)預防性干預
為了避免由于路面狀況不佳等原因導致自動駕駛功能退出,駕駛員采取的預防性人工干預措施,例如:避開前方施工區域;避讓自行車騎行者,為其提供足夠空間;為保障行人安全而采取的預防性措施;確保車輛在惡劣天氣條件下的安全行駛。
-
自動駕駛
+關注
關注
793文章
14880瀏覽量
179800
原文標題:2018年DMV自動駕駛脫離報告出爐,只看排名?不看脫離原因怎么行?
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何構建適合自動駕駛的世界模型?

自動駕駛汽車如何實現自動駕駛

2026年自動駕駛汽車發展趨勢前瞻

如何設計好自動駕駛ODD?


不同等級的自動駕駛技術要求上有何不同?
塑造自動駕駛汽車格局的核心技術
卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

2025年的自動駕駛技術有哪些升級?

小馬智行助力公路干線物流自動駕駛發展
自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統視角




 工商網監
工商網監
評論