") Pieter Abbeel發(fā)布了一份資源大禮:《深度學習與機器人學》105頁PPT
Pieter Abbeel發(fā)布了一份資源大禮:《深度學習與機器人學》105頁PPT

2019年開啟之際,美國加州大學伯克利分校教授、機器人與強化學習領(lǐng)域?qū)<?Pieter Abbeel 發(fā)布了一份資源大禮:《深度學習與機器人學》105頁PPT。這份PPT整理自Abbeel教授2018年受邀參加的69個演講,內(nèi)容涵蓋監(jiān)督學習、強化學習和無監(jiān)督學習的重要進展,以及深度學習的主要應用等方面,有助于讀者對深度學習和機器人學有一個宏觀的理解。
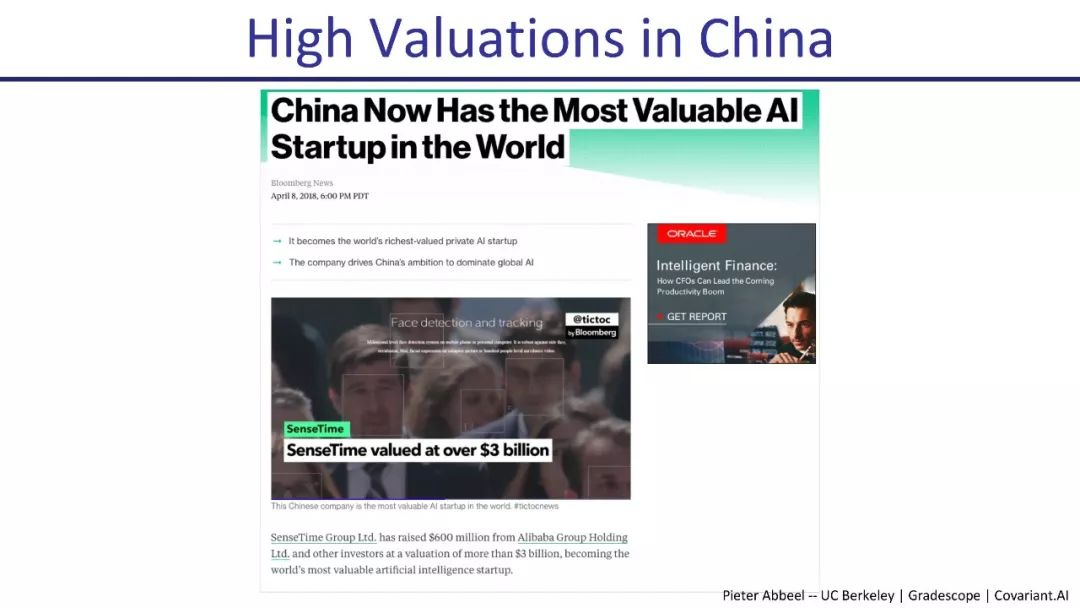
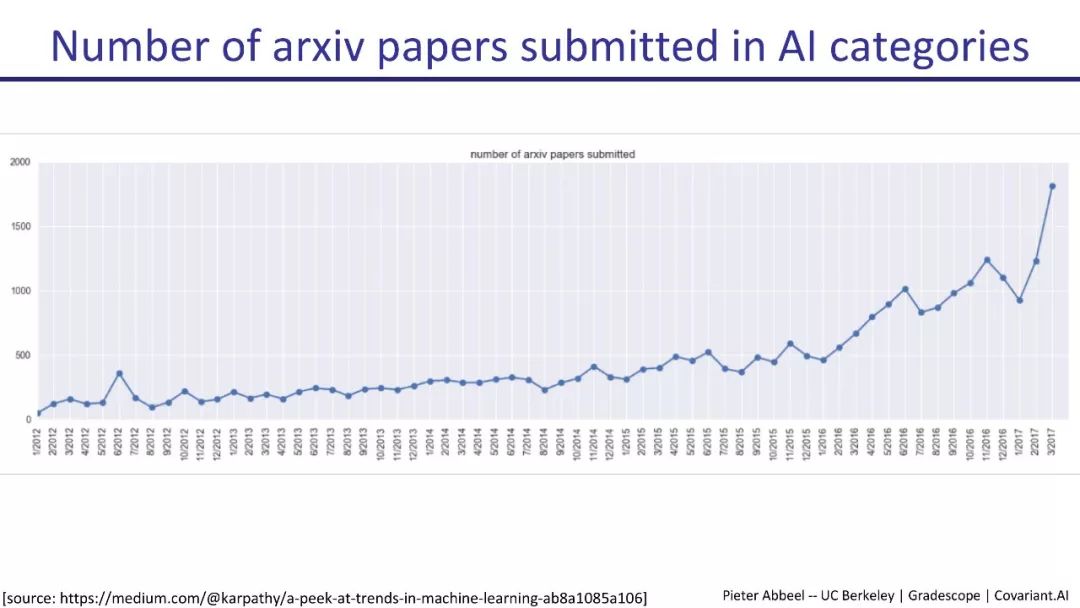
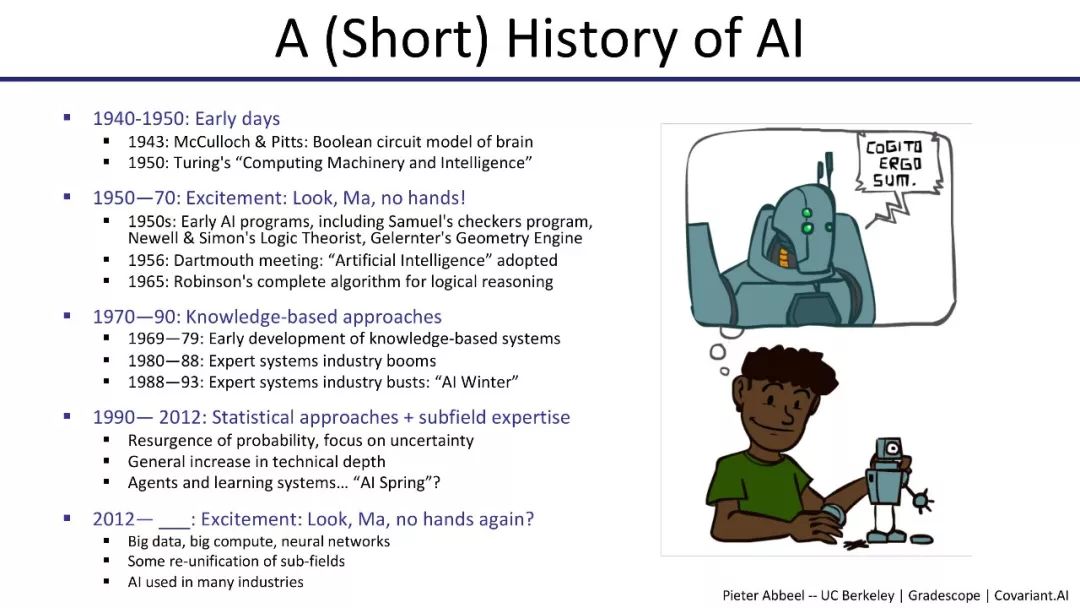
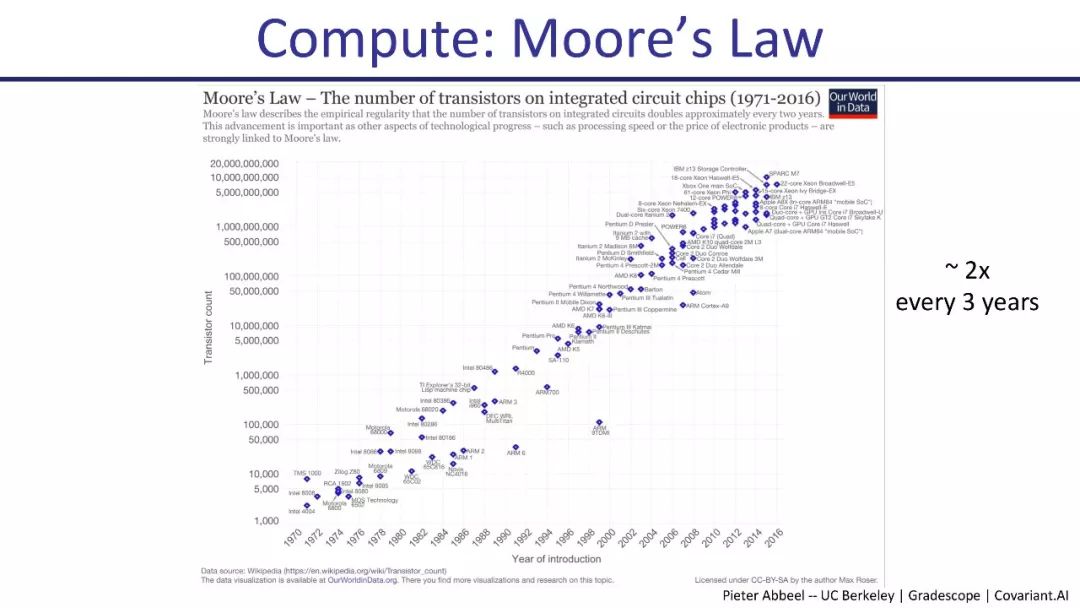
Pieter Abbeel教授從AI近年的一些“熱論”講起,從馬斯克認為AI是人類文明面臨的最大威脅、普京說“誰能成為AI領(lǐng)域的領(lǐng)袖,誰就將成為世界的主宰者”,概述了近年來AI的熱潮:NIPS等頂會的參會人數(shù)達到史上最高、arxiv上AI領(lǐng)域的論文翻倍增長。
報告的主體部分是“深度學習成功”,詳細介紹了監(jiān)督學習、強化學習和無監(jiān)督學習的重要進展。Pieter Abbeel教授對這三個概念的解釋如下:
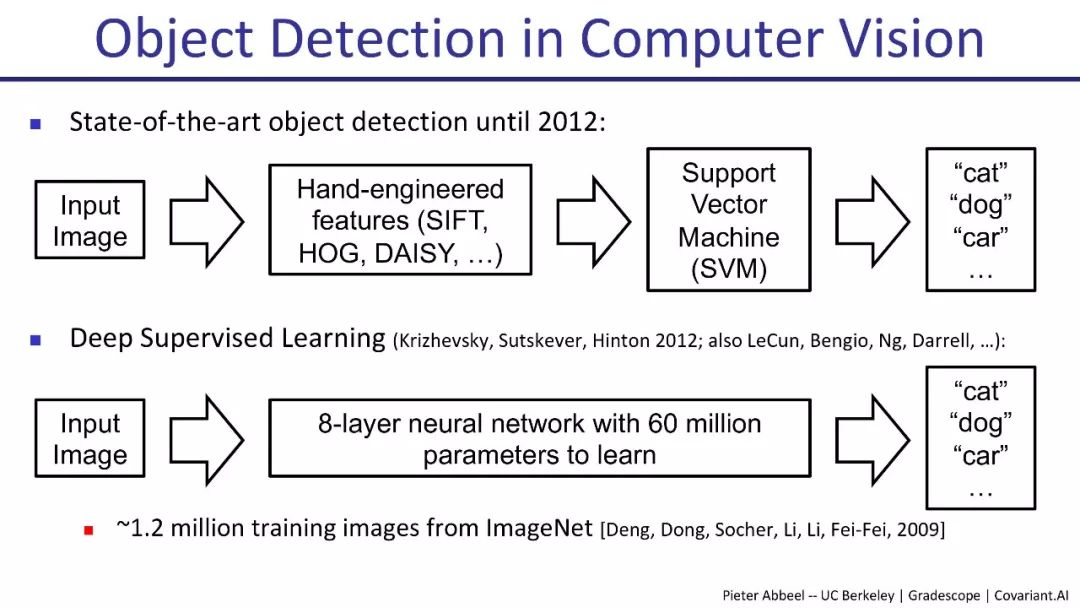
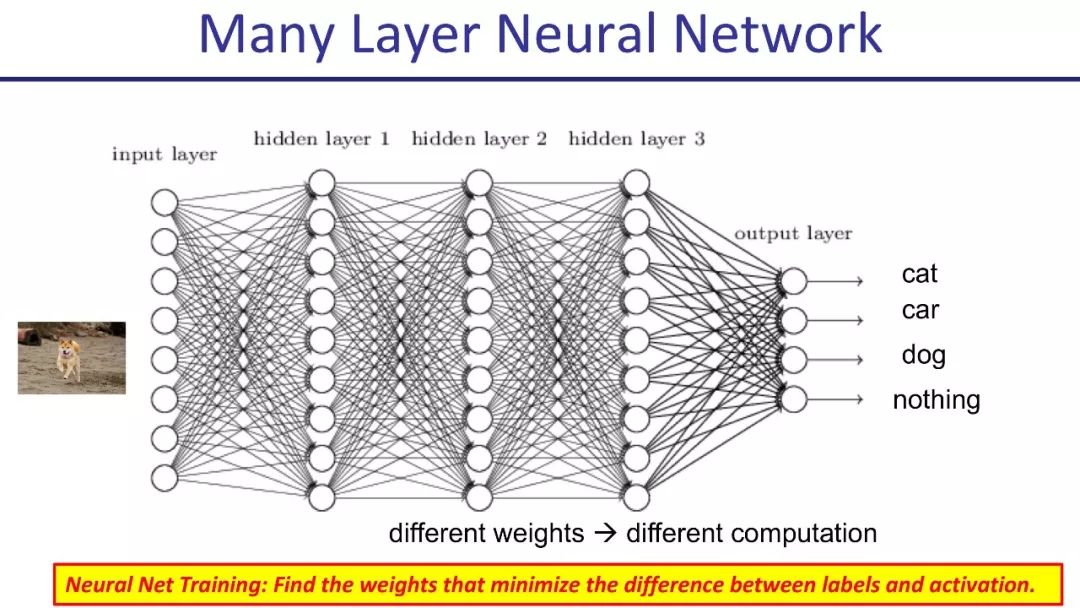
監(jiān)督學習:模式識別,如果有足夠多的數(shù)據(jù)(input -> output pairs),那么神經(jīng)網(wǎng)絡(luò)就能夠?qū)W習模式;
強化學習:通過試錯的過程,學習目標導向的行為
無監(jiān)督學習:沒有明確的監(jiān)督的條件下,學習世界的結(jié)構(gòu)
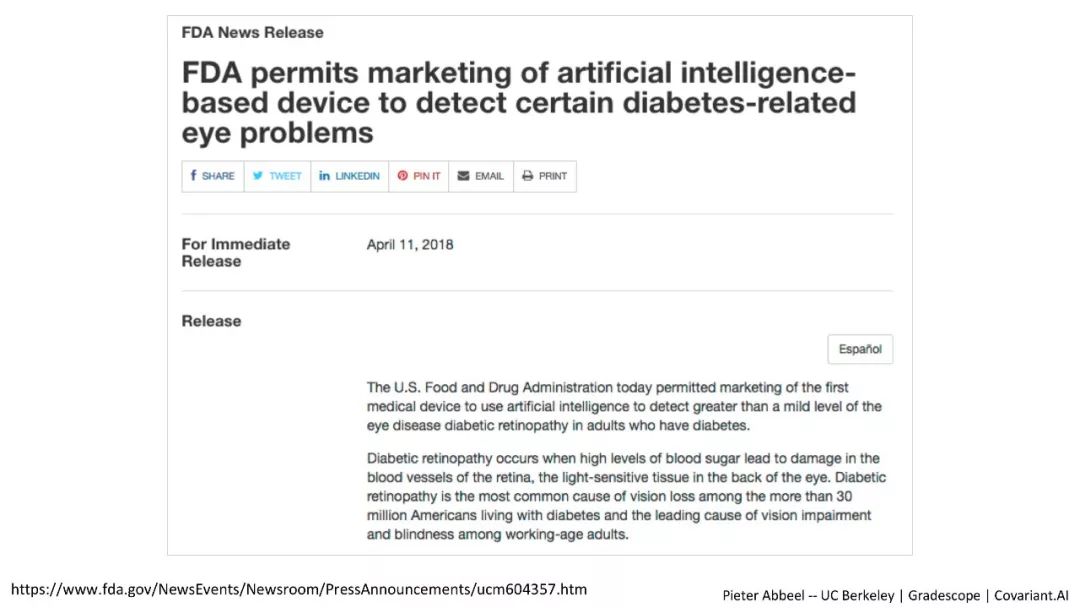
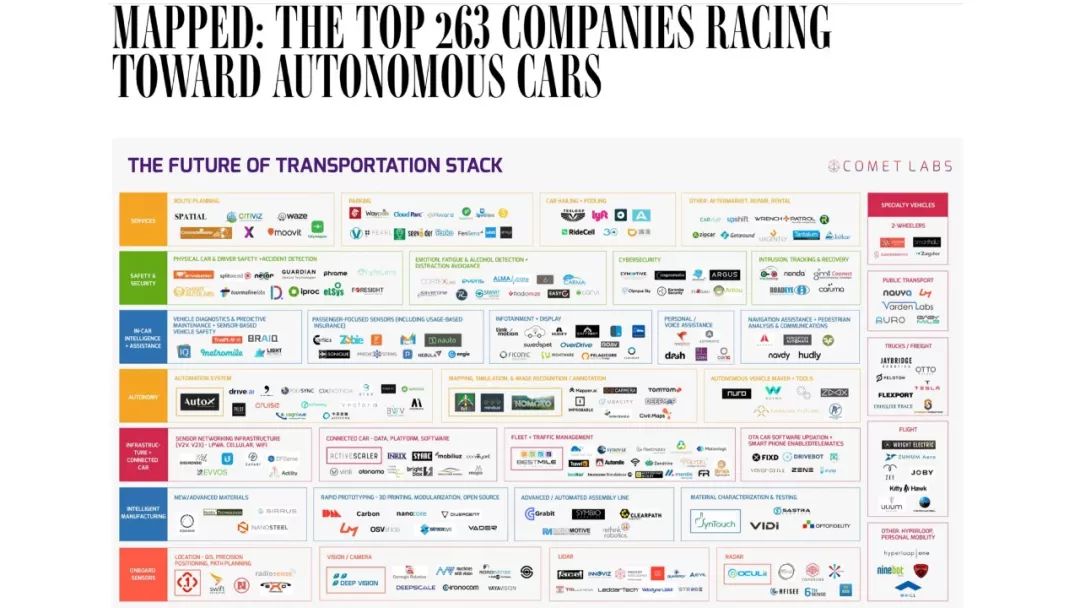
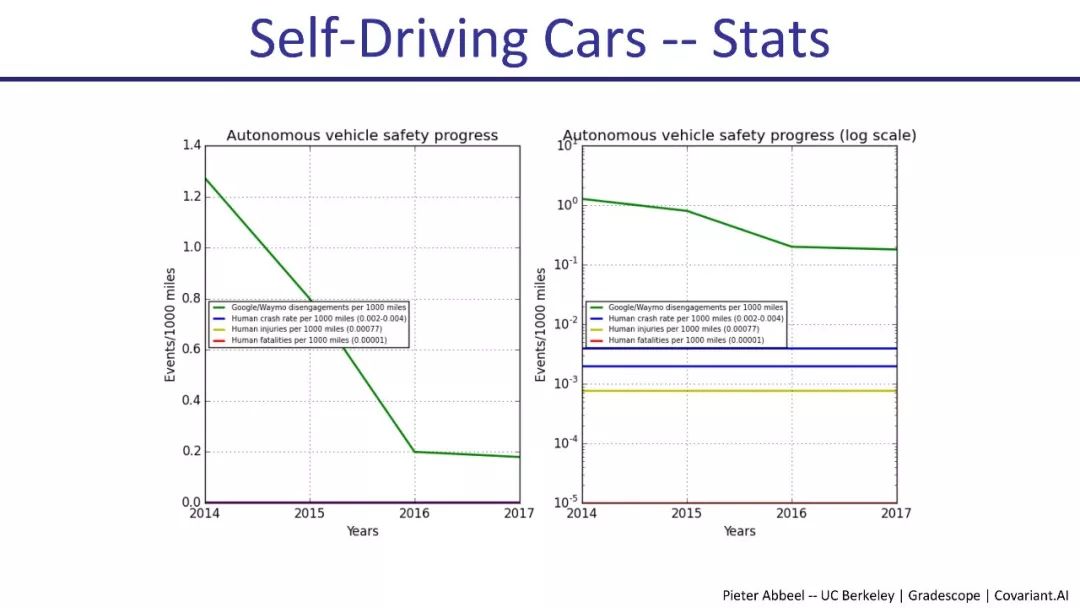
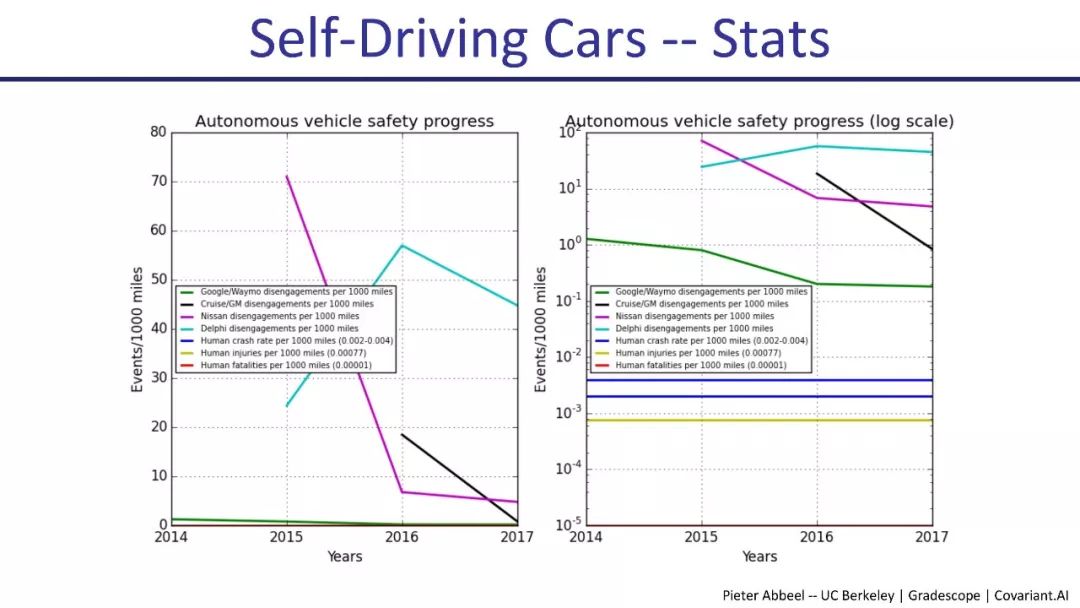
最后,報告展示了深度學習的一系列應用。
PPT下載地址:
https://www.dropbox.com/s/dw4kmxkrv3orujd/2018_12_xx_Abbeel--AI.pdf?dl=0
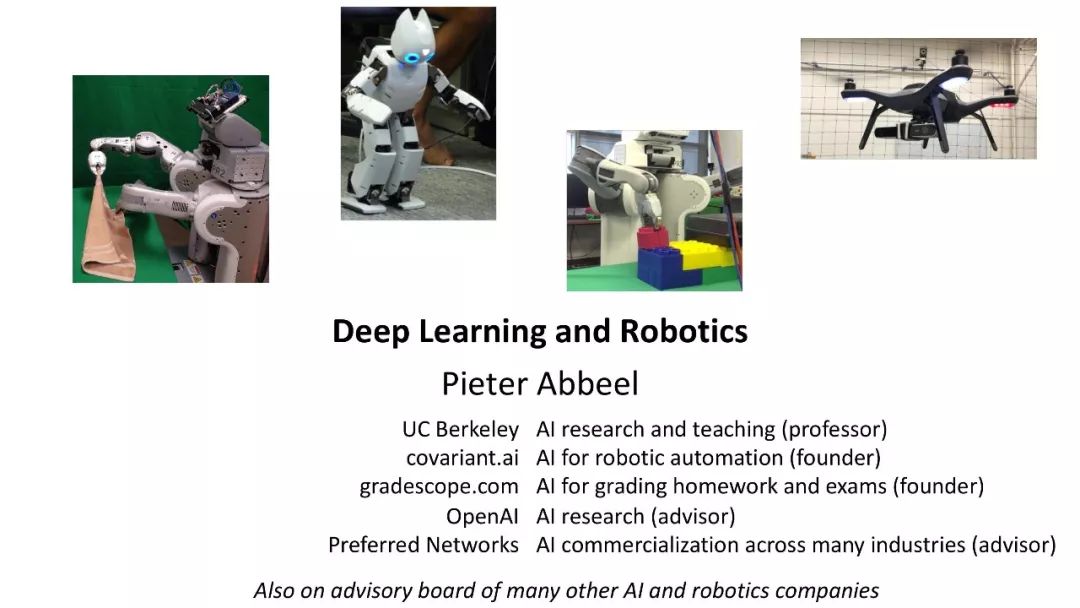
Pieter Abbeel教授簡介

Pieter Abbeel,加州大學伯克利分校教授、機器人學習實驗室主任,伯克利人工智能研究(BAIR)實驗室聯(lián)合主任。
Pieter Abbeel是機器人和強化學習領(lǐng)域的大牛。Pieter Abbeel 2008年從斯坦福大學獲得博士學位,師從百度前首席科學家 Andrew Ng(吳恩達),畢業(yè)后在UC Berkeley任教。
2016~2017年,Pieter Abbeel加入Open AI,任研究科學家。現(xiàn)在則是Open AI顧問。
Pieter Abbeel還是兩家AI公司的創(chuàng)始人,Gradescope和covariant.ai。Gradescope開發(fā)為家庭作業(yè)、課題研究、試卷等打分的AI系統(tǒng);covariant.ai開發(fā)機器人自動化的AI系統(tǒng),在制造/倉儲/電子商務(wù)/物流等領(lǐng)域應用。
Pieter Abbeel 的研究重點特別集中于如何讓機器人向人類學習(學徒學習),如何讓機器人通過自己的試錯過程學習(強化學習),以及如何通過從learning-to-learn(元學習)過程中加快技能獲取。他開發(fā)的機器人已經(jīng)學會了先進的直升機特技飛行、打結(jié)、基本裝配、疊衣服、移動、以及基于視覺的機器人操作。
機器人疊毛巾
Pieter Abbeel目前的主要研究方向:機器人和機器學習,特別關(guān)注深度強化學習、深度模仿學習、深度無監(jiān)督學習、元學習、learning-to-learn、以及AI安全。
PPT全文






















-
機器人
+關(guān)注
關(guān)注
213文章
31320瀏覽量
223392 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4840瀏覽量
108084 -
深度學習
+關(guān)注
關(guān)注
73文章
5603瀏覽量
124583
原文標題:【強化學習干貨】《深度學習與機器人學》大牛Pieter Abbeel 105頁PPT下載
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于NVIDIA Isaac Lab拓展多模態(tài)機器人學習

NVIDIA神經(jīng)網(wǎng)絡(luò)創(chuàng)新研究重塑機器人學習

NVIDIA Isaac Lab 2.3新增功能助力簡化機器人學習
NVIDIA開源物理引擎與OpenUSD加速機器人學習
NVIDIA 發(fā)布三大利器,推動人形機器人邁向新紀元
英偉達發(fā)布機器人 “新大腦”,黃仁勛:人形機器人三年普及
易控智駕與中科院端到端自動駕駛方案入選CoRL 2025

NVIDIA展示機器人領(lǐng)域的研究成果
NVIDIA Isaac Lab可用環(huán)境與強化學習腳本使用指南

通過NVIDIA Cosmos模型增強機器人學習




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論