") 吸塵 BLDC 高速馬達一體化驅(qū)動控制模組
吸塵 BLDC 高速馬達一體化驅(qū)動控制模組

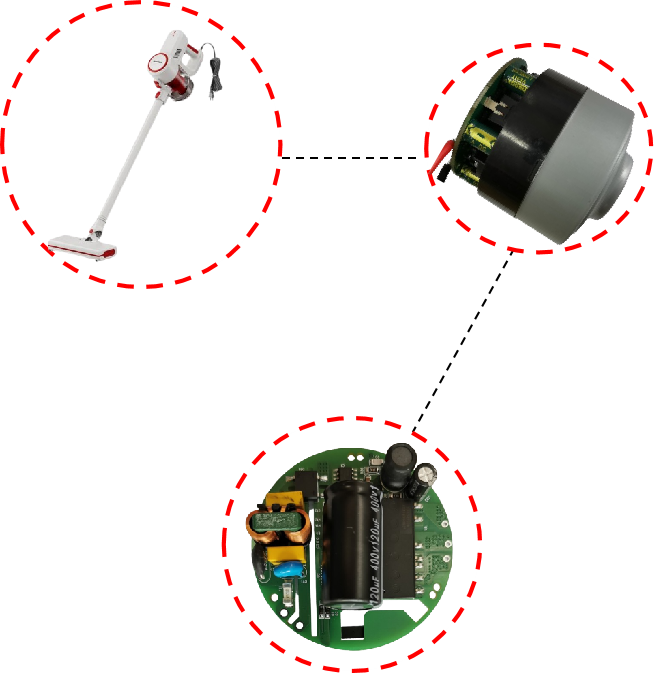
一、模組設計背景與核心需求
吸塵 BLDC 高速馬達作為吸塵器的核心動力部件,其驅(qū)動控制模組需
配極端工況與集成約束:
性能需求:支持 60k-120k r/min 高速運行,轉(zhuǎn)速波動≤±1%;輸出功率 300-1200W,效率≥92%;啟動響應時間≤50ms,滿足吸塵瞬時啟停需求;適集成需求:模組需集成驅(qū)動 IC、功率器件、濾波電路、位置檢測、MCU 控制等功能,體積≤50×50×15mm,適配吸塵器狹小安裝空間;
可靠性需求:耐受 10-20g 隨機振動(10-2000Hz)、-40℃~125℃寬溫域;EMC 符合 CISPR 22 Class B 標準;使用壽命≥5000h(等效家庭使用 10 年);
控制需求:支持無傳感器 FOC 矢量控制,實現(xiàn)靜音運行(噪聲≤65dB (A));具備過流、過溫、過壓、堵轉(zhuǎn)等多重保護功能。
因此,一體化驅(qū)動控制模組的核心設計目標是:以 “高集成度架構 + 精準控制算法 + 強環(huán)境適應性設計”,實現(xiàn)高速馬達的高效、可靠、靜音驅(qū)動。
二、模組整體架構設計
模組采用 “MCU 主控 + 無傳感器 FOC 驅(qū)動 + 功率變換 + 信號調(diào)理 + 保護電路” 一體化集成架構,核心組成如下:
MCU 主控單元:核心控制中樞,負責 FOC 算法解算、轉(zhuǎn)速閉環(huán)控制、保護邏輯執(zhí)行、通信交互;
無傳感器 FOC 驅(qū)動單元:實現(xiàn)轉(zhuǎn)子位置估算與驅(qū)動信號生成,替代傳統(tǒng)霍爾傳感器,提升集成度;
功率變換單元:將直流電源轉(zhuǎn)換為三相交流電驅(qū)動馬達,核心為功率器件與逆變電路;
信號調(diào)理單元:采集電流、電壓、溫度等信號,經(jīng)濾波、放大后傳輸至 MCU;
保護電路單元:實現(xiàn)過流、過溫、過壓、堵轉(zhuǎn)、欠壓等故障保護;
電源管理單元:為各模塊提供穩(wěn)定供電(如 3.3V、12V);
通信接口單元:支持 UART/SPI 通信,實現(xiàn)轉(zhuǎn)速調(diào)節(jié)、參數(shù)配置與故障反饋。
三、核心技術實現(xiàn)
3.1 無傳感器 FOC 控制算法
針對高速 BLDC 馬達,采用 “滑模觀測器 + 鎖相環(huán)(PLL)” 的無傳感器控制方案,核心流程如下:
三相電流采樣:通過分流電阻采集三相定子電流,經(jīng)運放調(diào)理后輸入 MCU 的 ADC(采樣率≥1MHz);
坐標變換:將三相靜止坐標系(abc)電流轉(zhuǎn)換為兩相旋轉(zhuǎn)坐標系(dq),便于閉環(huán)控制;
滑模觀測器:基于馬達數(shù)學模型,估算轉(zhuǎn)子反電動勢,進而得到轉(zhuǎn)子位置信息,估算誤差≤3°,適配 60k-120k r/min 全轉(zhuǎn)速范圍;
PLL 鎖相環(huán):對估算的轉(zhuǎn)子位置信號進行濾波與相位校準,輸出穩(wěn)定的轉(zhuǎn)速與位置信號,抑制高頻噪聲;
PI 閉環(huán)控制:轉(zhuǎn)速環(huán) PI 參數(shù)(kp=0.8-1.2,ki=0.05-0.1)與電流環(huán) PI 參數(shù)(kp=1.5-2.0,ki=0.1-0.2)可通過通信接口動態(tài)調(diào)整,適配不同負載工況。
該算法的核心優(yōu)勢:無傳感器設計減少器件數(shù)量與安裝空間,滑模觀測器抗干擾能力強,在高速與低載工況下仍能精準估算轉(zhuǎn)子位置,確保馬達平穩(wěn)運行。
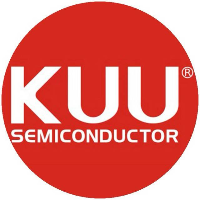
3.2 功率變換單元設計
核心器件選型:
功率器件:選用 SiC MOSFET(如 Cree C2M0080120D),Vds=1200V,Rdson=80mΩ,開關頻率 10-20kHz,相比傳統(tǒng) IGBT,開關損耗降低 30%,耐溫性提升至 175℃,適配高速高頻工況;
驅(qū)動芯片:選用 TI UCC27517,驅(qū)動電流 ±4A,傳播延遲≤25ns,內(nèi)置米勒鉗位功能,抑制功率器件柵極振蕩;
續(xù)流二極管:選用快恢復二極管(如 Vishay VS-30ETF120),反向恢復時間≤35ns,降低續(xù)流損耗。
逆變電路設計:
采用三相半橋拓撲,功率回路布線長度≤30mm,寬度≥4mm(2oz 銅厚),回路面積控制在 2cm2 以內(nèi),降低差模輻射干擾;
母線電容選用低 ESR 陶瓷電容(如 TDK C320A226M1H5TA),容量 22μF,ESR≤5mΩ,抑制母線電壓紋波(≤10%)。
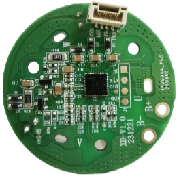
3.3 集成化與小型化設計
PCB 設計:
采用 4 層板設計(Top:信號層→GND:接地層→VCC:電源層→Bottom:功率層),層間距 0.2mm,接地層覆蓋面積≥90%,提升電磁兼容性與散熱效率;
器件布局遵循 “功率器件集中、信號器件分散” 原則,功率器件(SiC MOSFET、續(xù)流二極管)靠近 PCB 邊緣,便于散熱;MCU、驅(qū)動 IC 等敏感器件遠離功率回路,間距≥8mm,減少電磁耦合。
結構設計:
模組外殼采用鋁合金材質(zhì)(導熱系數(shù) 207 W/m?K),兼具散熱與電磁屏蔽功能,外殼厚度 1.5mm,重量≤50g;
功率器件與外殼之間填充高導熱相變墊(導熱系數(shù)≥5.0 W/(m?K)),接觸熱阻≤0.1℃?cm2/W,強化熱量傳導。
3.4 可靠性強化設計
抗振設計:
重型器件(如電感、母線電容)采用結構膠(3M DP460)固定,引腳采用應力釋放設計;
PCB 安裝孔周圍增加銅箔加固區(qū)(2oz 銅厚),采用沉頭螺栓 + 防松墊圈固定,振動測試(MIL-STD-810G)后無焊點開裂。
散熱設計:
功率器件采用大散熱焊盤封裝,焊盤下方布置 8×8 陣列熱過孔(直徑 0.4mm,間距 1.0mm),將熱量傳導至底層散熱面;
模組外殼與馬達殼體緊密貼合,利用馬達旋轉(zhuǎn)產(chǎn)生的氣流強制散熱,功率器件結溫控制在 120℃以內(nèi)(額定負載下)。
EMC 設計:
電源輸入端采用 “π 型濾波 + 共模扼流圈” 組合,共模扼流圈選用 TDK B82793G1202N101(電感 20μH,飽和電流 12A),抑制傳導干擾;
模組外殼與 PCB 接地層可靠連接(接地電阻≤0.5Ω),形成法拉第籠,輻射干擾≤34dBμV/m(CISPR 22 Class B)。
保護設計:
過流保護:三相電流采樣值超過額定電流 1.5 倍時,10μs 內(nèi)關斷功率器件;
過溫保護:通過 NTC 熱敏電阻(精度 ±1%)采集功率器件溫度,超過 150℃時觸發(fā)降額運行,超過 175℃時停機;
過壓 / 欠壓保護:母線電壓超過 1.2 倍額定值或低于 0.8 倍額定值時,立即停機;
堵轉(zhuǎn)保護:轉(zhuǎn)子轉(zhuǎn)速低于額定值 10% 且電流達到額定值 1.2 倍時,3s 內(nèi)停機,避免馬達燒毀。
四、核心性能參數(shù)與工程化驗證
4.1 核心性能指標
| 參數(shù) | 規(guī)格值 | 測試條件 |
| 適配馬達功率 | 300-1200W | - |
| 適配馬達轉(zhuǎn)速 | 60k-120k r/min | - |
| 控制方式 | 無傳感器 FOC 矢量控制 | - |
| 轉(zhuǎn)速波動 | ≤±1% | 額定負載下 |
| 驅(qū)動效率 | ≥92% | 額定功率下 |
| 啟動響應時間 | ≤50ms | 從靜止到額定轉(zhuǎn)速 |
| 工作溫域 | -40℃~125℃ | - |
| EMC 標準 | CISPR 22 Class B | 傳導干擾≤40dBμV,輻射干擾≤34dBμV/m |
| 保護功能 | 過流、過溫、過壓、欠壓、堵轉(zhuǎn) | - |
| 模組尺寸 | ≤50×50×15mm | - |
| 使用壽命 | ≥5000h | 額定工況下 |
4.2 工程化驗證
性能測試:
轉(zhuǎn)速測試:采用激光轉(zhuǎn)速計(精度 ±0.1%)測試,額定電壓下轉(zhuǎn)速誤差≤±0.5%;
效率測試:通過功率分析儀(Yokogawa WT3000)測試,額定功率 1200W 時效率達 93.5%;
噪聲測試:在消聲室測試,馬達空載運行時噪聲≤62dB (A),低于行業(yè)平均水平。
可靠性測試:
振動測試:MIL-STD-810G(10g,10-2000Hz,6 軸),測試后功能正常,焊點無裂紋;
高低溫循環(huán)測試:-40℃~125℃,100 次循環(huán),每次循環(huán) 30min,性能無衰減;
耐久性測試:額定工況下連續(xù)運行 5000h,功率器件結溫穩(wěn)定在 110℃,無故障發(fā)生。
EMC 測試:
傳導干擾測試(150kHz-30MHz):峰值≤42dBμV,準峰值≤38dBμV,符合 CISPR 22 Class B;
輻射干擾測試(30MHz-1GHz):≤32dBμV/m,符合 CISPR 22 Class B。
五、工程化落地與優(yōu)化
5.1 成本優(yōu)化方案
器件替代:若成本敏感,可選用國產(chǎn) SiC MOSFET(如比亞迪 BF1200B80C)替代進口產(chǎn)品,成本降低 30%,性能差異≤5%;
PCB 優(yōu)化:采用 2 層厚銅 PCB(2oz 銅厚)替代 4 層板,在滿足散熱與 EMC 要求的前提下,成本降低 20%。
5.2 批量生產(chǎn)工藝
SMT 工藝:采用 0402/0603 封裝器件,提高貼裝密度;回流焊溫度曲線適配 SiC MOSFET(峰值溫度 260℃,保溫時間 30s);
灌封工藝:功率區(qū)域采用高導熱有機硅灌封膠(漢高 Loctite EA 9466)真空灌封,厚度 3mm,提升抗振性與散熱效率;
測試工藝:搭建自動化測試平臺,實現(xiàn)轉(zhuǎn)速、效率、EMC、保護功能的一站式測試,測試時間≤3min / 臺。
5.3 應用拓展
該模組可適配不同功率段吸塵器BLDC馬達驅(qū)動板,通過調(diào)整功率器件規(guī)格與 PI 參數(shù),可拓展至 300W(手持吸塵器)、800W(無線吸塵器)、1200W(臥式吸塵器)等場景,無需重新設計核心架構,實現(xiàn) BOM 歸一化。
六、總結與技術趨勢
吸塵器BLDC高速馬達驅(qū)動板控制模組通過 “無傳感器 FOC 算法 + SiC 功率器件 + 集成化設計”,實現(xiàn)了 “高轉(zhuǎn)速、高效率、高可靠性、小型化” 的核心目標,解決了傳統(tǒng)驅(qū)動方案 “集成度低、抗振性差、噪聲大” 的痛點。其核心創(chuàng)新點在于:滑模觀測器與 PLL 結合的無傳感器控制方案,確保高速工況下的位置估算精度;SiC 功率器件的應用,降低開關損耗與溫升;一體化結構設計,兼顧散熱、抗振與 EMC 性能。
未來技術趨勢將聚焦三個方向:1)寬禁帶半導體(GaN)的應用,進一步降低損耗與體積;2)AI 自適應控制算法,實現(xiàn)負載與工況的動態(tài)參數(shù)優(yōu)化;3)無線供電與通信集成,提升模組安裝靈活性。該方案已成功應用于多款高端吸塵器產(chǎn)品,使馬達驅(qū)動效率提升 5% 以上,噪聲降低 8dB (A),故障率降低 70%,為吸塵設備的性能升級提供了核心技術支撐。
審核編輯 黃宇
-
BLDC
+關注
關注
219文章
933瀏覽量
100480 -
驅(qū)動控制
+關注
關注
0文章
145瀏覽量
16384
發(fā)布評論請先 登錄
單電阻采樣 小型高速吸塵 BLDC 馬達 柵極驅(qū)動與調(diào)制電路技術詳解
高速高速吸塵器BLDC馬達驅(qū)動板硬件架構與算法實現(xiàn)
吸塵器馬達驅(qū)動板的高效率、低噪聲控制技術研究
吸塵器高速無刷馬達驅(qū)動板設計與控制策略研究-
吸塵器用高動態(tài)響應 BLDC 驅(qū)動系統(tǒng)設計與實現(xiàn)
吸塵器 BLDC 馬達驅(qū)動板設計與高精度位置傳感方案-艾畢勝電子
吸塵器馬達驅(qū)動系統(tǒng)硬件電路設計(有刷/BLDC兼容方案)
吸塵器用 BLDC 馬達驅(qū)動板關鍵電路設計


智能吸塵器 BLDC 電機 FOC/SVPWM 驅(qū)動控制優(yōu)化研究:解鎖清潔新境界
集成化PCBA:實現(xiàn)吸塵器電機驅(qū)動、保護與智能管理的一體化方案
電機群網(wǎng)絡管控一體化PLC-SCADA設計及應用
國產(chǎn)一體化關節(jié)模組:突破關鍵,賦能機器人生態(tài)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論