 單電阻采樣 小型高速吸塵 BLDC 馬達 柵極驅動與調制電路技術詳解
單電阻采樣 小型高速吸塵 BLDC 馬達 柵極驅動與調制電路技術詳解

手持式小型高速無刷吸塵器普遍采用 低壓大電流、高轉速(60k–120k r/min)、小體積、低成本、無感 FOC/方波驅動方案。為壓縮 PCB 面積與物料成本,主流機型大量使用單電阻母線采樣 + 分立/集成柵極預驅 + SVPWM/混合調制 架構。
本文從原理、拓撲、柵極回路、調制方式、單電阻采樣時序、損耗、EMC、開機尖峰與量產隱患展開,給出適合小型高速吸塵 BLDC 的柵極驅動調制標準化電路設計。
一、應用邊界與約束條件(吸塵器獨有) 1)電壓:3S–7S 鋰電(11.1V–25.2V) 2)轉速:超高線速、電頻率高、換相快、死區敏感 3)電流:峰值 20–40A、導通損耗為主 4)空間:超薄板、密集器件、導熱膠粘、風道出風、溫升受限 5)控制:無感、無霍爾、只用母線單電阻、依靠采樣重構三相 6)EMC:風道裸露、開關尖峰容易嘯叫、輻射超標、手機耦合干擾 因此電路核心矛盾:柵極快與慢、損耗與EMC、采樣開窗與死區、體積與散熱。
二、整體拓撲:單電阻采樣 + 六管全橋 + 預驅柵極調制
2.1 系統框圖 鋰電輸入→防反接/TVS→母線濾波 MLCC→六管 MOS 全橋→高速 BLDC MCU→PWM 邏輯→預驅柵極電路→上下橋 MOS 母線低端單電阻→運放放大→ADC→電流重構→限流/閉環/FOC
2.2 為什么選“單電阻”
- 只用 1 顆低阻大功率采樣電阻(0.5mΩ–5mΩ)
- 成本最低、走線最簡、占面積最小
- 缺點:需要配合調制開窗、時序對齊、盲區補償、死區擬合 適合:小高速吸塵、方波六步、低成本無感 FOC。
三、柵極驅動基礎回路(決定溫升、炸管、EMC、嘯叫)
3.1 典型集成預驅拓撲(吸塵器主流) 三片半橋 / 一片三橋預驅 + 自舉電路 - 每相上橋:自舉二極管 + 自舉電容(1μF X7R)
- 下橋:直接 12V 軌驅動
- 內置死區、過流鎖定、UVLO、互鎖
3.2 柵極等效模型關鍵參數
- Qg:MOS 總柵荷(越小越適合高速)
- Cgs / Cgd:米勒平臺(尖峰、直通根源)
- Rds(on):決定持續溫升
- dv/dt / di/dt:決定 EMC
3.3 柵極電阻二分法(工程落地) 標準做法:分開開通電阻 / 關斷電阻
- 開通 Rg_on:抑制 di/dt、壓低尖峰、降EMC(10Ω–22Ω)
- 關斷 Rg_off:偏小、加快泄放、防米勒誤導通(2Ω–6Ω)
- 柵極并聯 100p–220p:抑制柵振蕩、降嘯叫 禁忌
- 只用一顆電阻:要么熱、要么吵、要么炸
- 電阻太小:尖峰炸 EMI、打單電阻采樣
- 電阻太大:開關損耗爆、MOS 熱死
四、高速吸塵器適合哪一種調制方式(核心選型)
4.1 常見三種 PWM 調制對比 1)雙邊對稱調制(H-PWM-L-PWM)
- 采樣窗口碎、盲區大、單電阻最難采、發熱最大 2)單邊低側調制(固定上橋、調制下橋,常用六步方波)
- 窗口穩定、單電阻最好采、邏輯最簡、適合高速吸塵 3)SVPWM 居中調制(FOC)
- 利用率高、轉矩平滑、噪音低、但對齊時序復雜 量產吸塵器結論
- 低端:單邊下橋調制 + 六步方波 + 單電阻
- 高端:分段 SVPWM + 移窗采樣 + 單電阻無感 FOC
4.2 死區匹配(高速最容易忽視) 高速電頻高,死區過大:轉矩塌、弱抖、效率掉、熱風 死區過小:米勒直通、相間炸橋 工程:動態死區 低速:1μs–2μs 高速:400ns–800ns
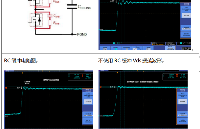
五、單電阻采樣對齊調制:怎么采、什么時候采、避開哪里 ### 5.1 采樣位置 下橋負極串聯一顆功率電阻→放大→ADC 只看到母線合成電流,看不到天然相電流
5.2 采樣必須滿足兩個條件 1)當前矢量必須兩相導通,開窗足夠 2)避開:死區、邊沿、尖峰、米勒、開關抖動
5.3 調制配合(電路寫法) PWM 需要拉出 最小有效采樣時間(Minimum Duty Valid Width)
- 窄占空跳過、插值補齊
- 居中翻轉、對齊采樣沿
- 避開自舉刷新沿
5.4 容易出現的硬件故障點
- 放大運放擺率不夠:高速采糊→過流誤保護、忽快忽慢
- 采樣走線夾在功率回路:耦合尖峰→跳動、限流亂跳
- 電阻靠近 MOS:溫升漂→零點漂移、低端無力 PCB:采樣必須差分、短、包圍地、遠離三相、遠離柵線
六、完整推薦參考電路(文字原理圖,適合寫文檔) 6.1 電源鏈 - BV → 12V DC-DC(給預驅)
- 12V → 3.3V LDO(MCU、運放) 6.2 預驅 & 自舉 每相:Boot Diode + 1μF Boot Cap + 柵二分電阻 + 小濾波電容
6.3 功率全橋 6 顆低壓 N 管、低 Rds、高 Qg耐受、60V 余量
6.4 單電阻放大 0.5–2mΩ → 差分運放 20–50 倍 → RC二階濾波 → ADC ### 6.5 BEMF 無感分壓 三相分壓鉗位 RC → 給到 ADC/比較,做零交叉換相
6.6 EMC 附屬
- 入口共模電感
- 母線附近高低搭配 MLCC + 低ESR - 相尖峰小型 RC/Snubber(輕量、不降效率)
七、損耗分解:為什么吸塵器一跑就熱 1)導通損耗:單電阻 + MOS 本體(最大) 2)開關損耗:高速、調制頻繁、柵速不配 3)死區損耗:高速放大 4)采樣放大靜態損耗(小) 優化:適度加大柵開通阻、動態死區、單邊調制壓低翻轉次數
八、量產典型問題對照(電路 + 調制雙向定位)
| 現象 | 表象 | 根因(柵/調制/采樣) |
| 起步抖、起不來 | 低頻抖動 | 死區大 + 采樣盲區 + 調制不對齊 |
| 跑久限流、忽快忽慢 | 隨機降速 | 采樣溫漂、走線耦合、尖峰打進ADC |
| MOS 容易炸 | 滿載瞬炸 | 米勒直通、柵阻不合理、無互鎖、殘壓 |
| 風聲尖嘯、刺耳 | 高頻異音 | 柵太快、雙邊調制、振蕩、EMC差 |
| 吸力不夠、發熱大 | 效率差 | 死區偏大、開關次數太多、雙邊翻轉 |
九、標準化設計要點總結(適合放進工藝/規范) 1)驅動:預驅 + 分開開通關斷柵阻 + 小消振電容 + 規整自舉 2)調制:高速優先單邊調制;FOC做移窗、擴窗對齊 3)采樣:單電阻差分走線、二階濾波、避開邊沿死區、預留最小開窗 4)保護:硬件快速關斷 + 軟件二次鎖死 + UVLO + BEMF堵轉 5)PCB:功率環極短、柵線獨立、采樣隔離、一地收斂 6)熱EMC:輕量Snubber、合理柵速、動態死區、原裝導熱復位
審核編輯 黃宇
-
BLDC
+關注
關注
219文章
933瀏覽量
100480 -
柵極驅動
+關注
關注
8文章
224瀏覽量
23957
發布評論請先 登錄
高速高速吸塵器BLDC馬達驅動板硬件架構與算法實現
吸塵器馬達驅動板的高效率、低噪聲控制技術研究
吸塵器高速無刷馬達驅動板設計與控制策略研究-
吸塵器用高動態響應 BLDC 驅動系統設計與實現
吸塵器 BLDC 馬達驅動板設計與高精度位置傳感方案-艾畢勝電子
吸塵器馬達驅動系統硬件電路設計(有刷/BLDC兼容方案)
吸塵器用 BLDC 馬達驅動板關鍵電路設計

探索MAX15024:高性能單/雙路高速MOSFET柵極驅動器
從芯片到方案,靈活因應多元 BLDC 驅動應用需求
UCC2753x系列單通道高速柵極驅動器:特性、應用與設計要點詳解
基于仁懋MOSFET的直流電機驅動電路:柵極電阻選型與VGS波形優化
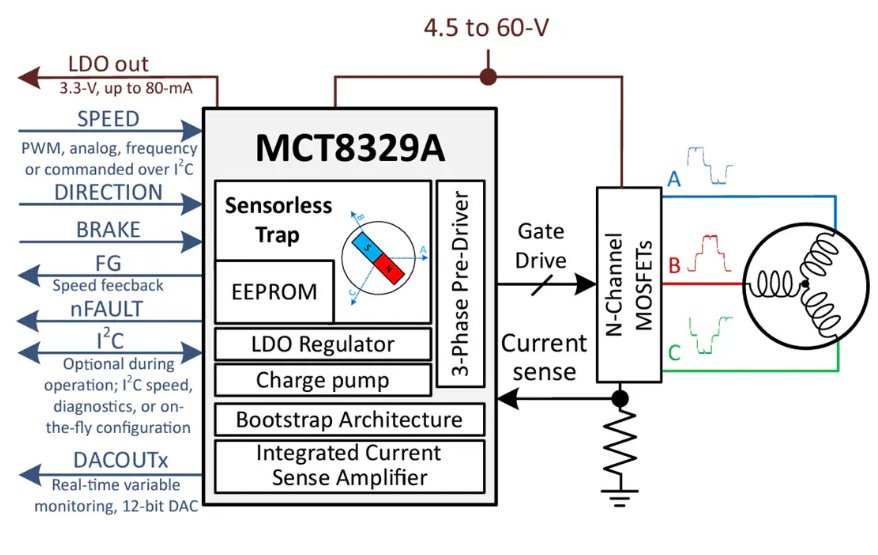
MCT8329A高速無傳感器梯形控制三相BLDC柵極驅動器技術解析
智能吸塵器 BLDC 電機 FOC/SVPWM 驅動控制優化研究:解鎖清潔新境界
靜音降噪馬達驅動技術改善手持吸塵器工作噪聲與振動控制
新品 | 驅動無刷直流 (BLDC) 電機用三相柵極驅動器評估板




 工商網監
工商網監
評論