 吸塵器用高動態響應 BLDC 驅動系統設計與實現
吸塵器用高動態響應 BLDC 驅動系統設計與實現

一、引言
無線吸塵器馬達驅動板在清潔過程中面臨頻繁的負載突變(如從硬地板切換至地毯、吸入大顆粒雜物),要求 BLDC(無刷直流電機)驅動系統具備毫秒級動態響應能力,同時兼顧能效、靜音與可靠性。傳統驅動系統采用固定參數 PI 控制,存在響應滯后、超調量大等問題,難以適配復雜工況。本文設計一款高動態響應 BLDC 驅動系統,通過硬件架構優化與控制算法創新,實現負載突變時的快速轉矩調節與轉速穩定,滿足高端吸塵器的性能需求。
二、系統總體架構設計
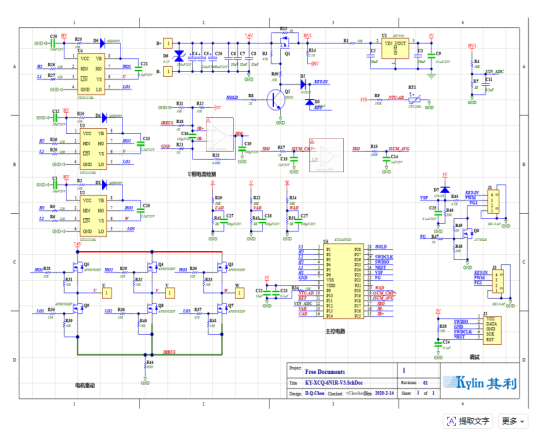
高動態響應 BLDC 驅動系統采用 “感知 - 控制 - 驅動 - 反饋” 閉環架構,核心由電源管理模塊、功率驅動模塊、主控單元、位置傳感模塊及保護電路組成。
(一)核心模塊選型
主控單元:選用 STM32H7 系列 MCU,主頻達 480MHz,集成浮點運算單元(FPU)與 Cordic 硬件加速器,可將坐標變換、PI 調節等核心運算耗時縮短至微秒級,為高動態控制算法提供硬件支撐。
功率驅動模塊:采用 GaN(氮化鎵)功率器件 ——Transphorm TP65H015G4WS,導通電阻僅 15mΩ,開關速度較傳統 Si MOSFET 提升 5 倍,開關頻率可突破 100kHz,減少驅動延遲;搭配 TI UCC21520 柵極驅動器,驅動電流達 4A,確保功率器件快速導通與關斷。
位置傳感模塊:選用 16 位分辨率的 AS5048B 磁感應編碼器,采樣頻率達 2MHz,角度更新時間僅 0.5μs,位置檢測誤差 ±0.05°,為動態控制提供高精度位置反饋。
電源管理模塊:采用同步 Buck 轉換器 MP2491,將電池包 20-29V 電壓轉換為 3.3V/5V,轉換效率達 96%,輸出紋波≤10mV,保障主控與傳感器穩定工作。
(二)硬件優化設計
PCB 布局:采用 “功率回路最小化” 設計,GaN 器件、母線電容、三相輸出端緊湊布局,功率回路面積≤5cm2,降低寄生電感;信號區與功率區采用隔離帶劃分,編碼器信號線采用差分走線,減少電磁干擾(EMI)。
電流采樣:選用高精度分流電阻(0.005Ω,精度 ±1%)進行三相電流采樣,搭配 TI INA282 電流采樣芯片,采樣帶寬達 1MHz,確保動態負載下電流信號的快速捕獲。
保護電路:集成過流、過溫、欠壓、過壓四重防護,過流檢測響應時間≤500ns,過溫保護閾值設為 125℃,欠壓 / 過壓閾值分別為 18V/32V,通過硬件快速關斷與軟件降額協同,提升系統可靠性。
三、高動態響應控制算法設計
(一)核心控制策略:模型預測控制(MPC)
傳統 FOC 算法依賴 PI 調節器,參數整定復雜且動態響應有限。本文采用模型預測電流控制(MPCC)替代傳統 PI 調節,核心原理如下:
基于 BLDC 電機數學模型,預測未來一個控制周期內的 d-q 軸電流變化趨勢;
以電流跟蹤誤差最小、開關損耗最優為目標函數,遍歷所有開關狀態;
選擇最優開關狀態輸出至功率驅動模塊,控制周期縮短至 10μs。
MPCC 算法無需復雜坐標變換與調制環節,響應速度較傳統 FOC 提升 3 倍,可快速跟蹤電流指令,實現轉矩的瞬時調節。
(二)動態優化技術
自適應參數辨識:通過擴展卡爾曼濾波(EKF)實時估算電機定子電阻、電感及反電動勢系數,補償溫漂與負載變化帶來的參數偏差,確保模型預測精度,使動態負載下電流跟蹤誤差≤2%。
快速弱磁控制:當轉速超過基速時,采用斜率限制策略動態注入負向 d 軸電流,避免母線電壓飽和,使馬達在 45000 r/min 高速下仍保持轉矩穩定,弱磁響應時間≤1ms。
負載前饋補償:基于編碼器檢測的轉速變化率,預判負載突變趨勢,提前調整 q 軸電流指令,減少轉速跌落與恢復時間。實測表明,該策略可使負載突變時轉速超調量從 15% 降至 3%,恢復時間從 50ms 縮短至 15ms。
(三)位置信號優化處理
針對動態工況下的位置信號抖動,設計 “自適應卡爾曼濾波 + 插值算法”:通過實時調整濾波增益,抑制高頻干擾;采用線性插值將編碼器采樣頻率從 2MHz 提升至 10MHz,位置檢測分辨率達 0.01°,確保低速轉矩精度 ±2%,高速轉速紋波≤1%。
四、系統測試與性能驗證
搭建實驗平臺,以某型號吸塵器用 BLDC 馬達(額定功率 600W,額定轉速 40000 r/min,極對數 4)為控制對象,對驅動系統進行性能測試,測試結果如下:
(一)動態響應性能
轉速階躍響應:從 20000 r/min 階躍至 40000 r/min,響應時間≤8ms,超調量≤2.5%;從 40000 r/min 階躍至 20000 r/min,制動時間≤10ms,無反向轉動。
負載突變響應:額定負載下突加 150% 負載,轉速跌落≤5%,恢復時間≤12ms;突卸 100% 負載,轉速超調≤3%,恢復時間≤8ms。
(二)能效與靜音性能
能效:額定負載下系統效率達 94%,較傳統驅動系統提升 6%;輕載(30% 額定負載)效率達 91%,提升 8%,有效延長吸塵器續航。
靜音:動態負載下轉矩脈動≤3.5%,整機運行噪音低至 58dB (A),較傳統方案降低 5dB (A)。
(三)可靠性測試
連續運行:85℃環境下連續運行 1000 小時,電機溫升≤60℃,驅動板無故障;
沖擊測試:承受 1000 次振動沖擊(加速度 10g,頻率 10-2000Hz),系統功能正常;
電磁兼容:傳導騷擾滿足 CISPR 22 Class B 標準,輻射騷擾滿足 CISPR 25 Class 3 標準。
五、結語
本文設計的高動態響應 BLDC 驅動系統,通過 GaN 功率器件的應用、PCB 布局優化,結合模型預測控制與動態優化算法,實現了負載突變時的快速響應與穩定控制。測試結果表明,系統動態響應速度、能效與靜音性能均優于傳統方案,可滿足高端無線吸塵器的技術需求。
未來,可進一步融合 AI 算法,實現負載特性自學習與控制參數自適應調整;同時探索 SiC 器件與多電機協同控制技術,推動驅動系統向更高能效、更優動態性能、更小體積方向發展,為吸塵器行業的智能化升級提供核心支撐。
審核編輯 黃宇
-
驅動系統
+關注
關注
3文章
406瀏覽量
28622 -
BLDC
+關注
關注
219文章
925瀏覽量
100424
發布評論請先 登錄
吸塵器 BLDC 馬達驅動板設計與高精度位置傳感方案-艾畢勝電子
吸塵器馬達驅動系統硬件電路設計(有刷/BLDC兼容方案)
吸塵器用 BLDC 馬達驅動板關鍵電路設計

其利天下高性能吸塵器驅動方案如何實現更強吸力與智能保護?

其利天下吸塵器無刷電機控制方案
無刷吸塵器在吸塵器領域帶來了革命性的提升,其優勢是全方位的【其利天下】
智能吸塵器 BLDC 電機 FOC/SVPWM 驅動控制優化研究:解鎖清潔新境界
無刷直流電機在車載吸塵器馬達驅動方案中的應用:突破效率與響應瓶頸
智能吸塵器無刷電機驅動方案:高能效、長壽命與低噪聲實現
面向手持吸塵器的高效FOC驅動系統:優化真空效率與整機能效
集成化PCBA:實現吸塵器電機驅動、保護與智能管理的一體化方案
吸塵器高效無刷電機驅動PCBA集成方案與功率拓撲優化
新品推薦 | MOS管在吸塵器產品上的應用

壓力傳感器AS6295在智能吸塵器中的作用

吸塵器“心臟”革命!仁懋TOLL技術重塑吸塵器動力




 工商網監
工商網監
評論