") 多車環(huán)境下車載毫米波雷達(dá)是否會相互干擾?
多車環(huán)境下車載毫米波雷達(dá)是否會相互干擾?

[首發(fā)于智駕最前沿微信公眾號]在汽車工業(yè)邁向智能化與自動化的進(jìn)程中,毫米波雷達(dá)已然成為了車輛感知體系中不可或缺的一部分。這種波長介于1毫米至10毫米之間的電磁波進(jìn)行探測的裝置,憑借其能夠穿透雨雪、濃霧及強(qiáng)光直射的全天候工作能力,為高級駕駛輔助系統(tǒng)提供了關(guān)鍵的距離與速度信息。
隨著自動駕駛等級從L2向L4、L5不斷攀升,單車搭載的雷達(dá)數(shù)量正在從兩三個躍升至十個甚至更多,這使得道路上的電磁環(huán)境變得空前復(fù)雜。當(dāng)多輛裝備了高性能雷達(dá)的汽車在擁擠的城市道路、狹窄的地下停車場或高速公路上匯聚時,它們各自發(fā)射的無線電信號是否會像嘈雜會場里的交談聲一樣互相干擾,從而失效?今天就詳細(xì)聊聊這個內(nèi)容。

毫米波雷達(dá)探測原理分析
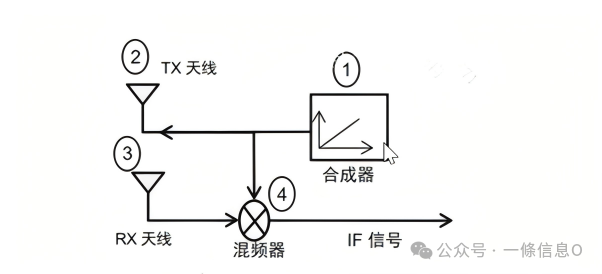
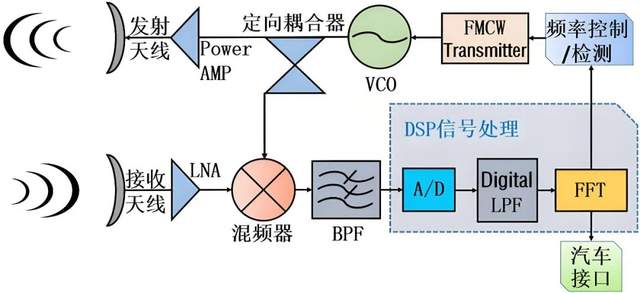
目前車載領(lǐng)域毫米波雷達(dá)的主流技術(shù)路徑是線性調(diào)頻連續(xù)波(FMCW)。這種雷達(dá)并不像傳統(tǒng)的脈沖雷達(dá)那樣發(fā)射間歇性的能量波,而是持續(xù)不斷地發(fā)出頻率隨時間線性增加的信號,這種信號在工程上被稱為“啁啾”(Chirp)。
如果我們將這種信號想象成一種不斷升高的哨聲,那么雷達(dá)的工作原理就是通過監(jiān)聽“回聲”來判斷周圍環(huán)境。當(dāng)這個“哨聲”撞擊到前方的障礙物后反射回來,雷達(dá)的接收天線呼吁會捕捉到這個帶有延遲的回聲。
接著,雷達(dá)內(nèi)部的混頻器會將當(dāng)前正在發(fā)射的信號與接收到的回聲信號進(jìn)行對比。由于電磁波飛行需要時間,回聲信號在頻率上會比當(dāng)前發(fā)射的信號滯后。通過計算這兩個頻率之間的差值,即差拍頻率,雷達(dá)就能精準(zhǔn)地推算出障礙物的具體距離。
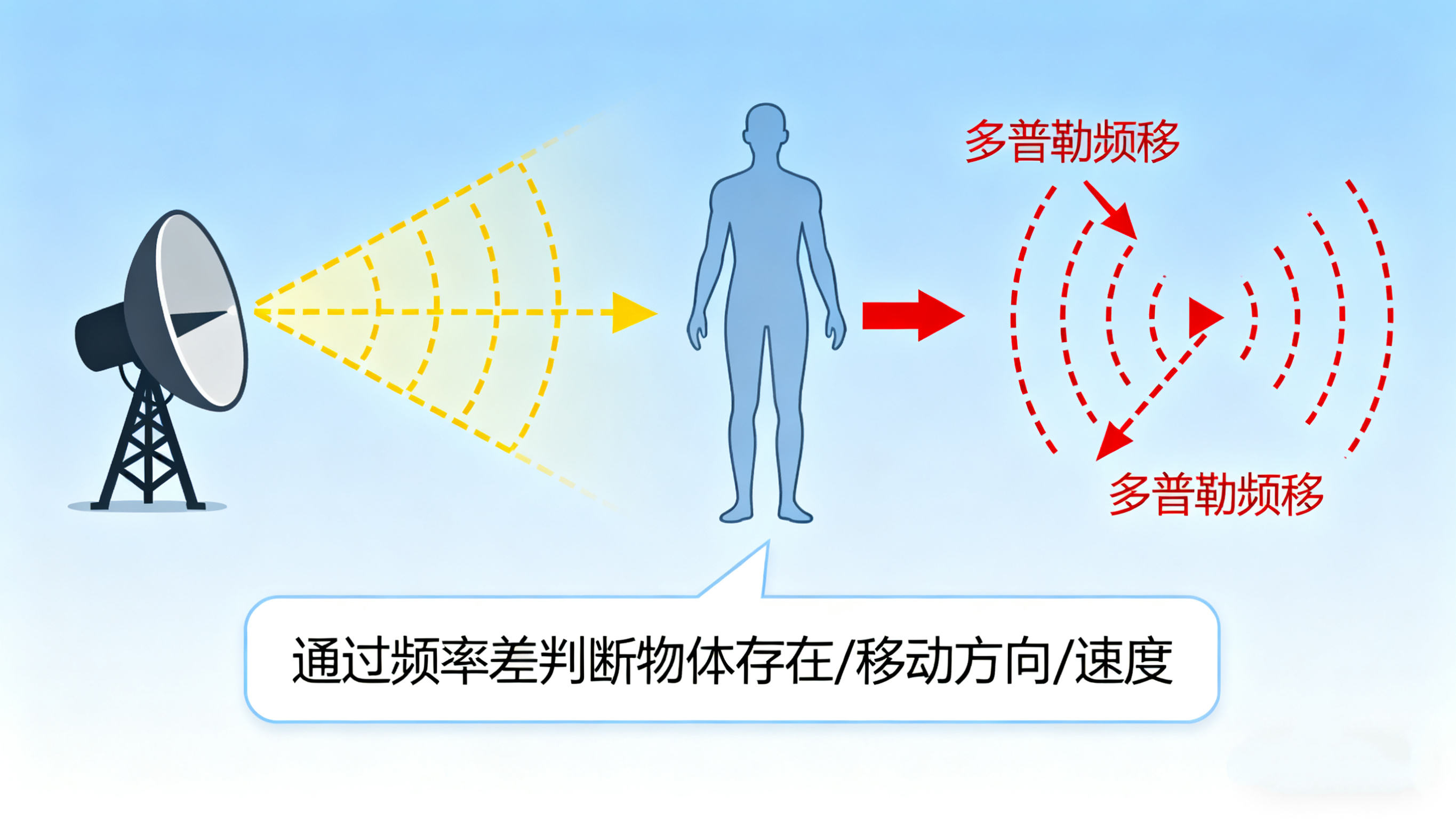
如果障礙物還在移動,回聲信號還會因為多普勒效應(yīng)產(chǎn)生相位變化,通過對連續(xù)多個脈沖的相位分析,雷達(dá)就能感知物體的相對速度。這種測距與測速的結(jié)合,構(gòu)成了車輛對動態(tài)環(huán)境最基本的認(rèn)知能力。

圖片源自:網(wǎng)絡(luò)
早期,毫米波雷達(dá)主要工作在24 GHz頻段,帶寬相對較窄,探測精度也有限。隨著技術(shù)的發(fā)展,全球范圍內(nèi)逐漸統(tǒng)一向77 GHz至81 GHz的高頻段過渡。高頻段不僅帶來了更小的天線尺寸,更重要的是它提供了高達(dá)4 GHz的可調(diào)帶寬,這直接提升了雷達(dá)的分辨率,使其能夠區(qū)分出距離非常近的兩個物體。
然而,正是這種頻率的高度集中和帶寬的共享,為后續(xù)的互干擾埋下了伏筆。在早期的ADAS應(yīng)用中,由于配備雷達(dá)的車輛比例較低,電磁干擾的問題并不突出,可以通過簡單的信號過濾技術(shù)掩蓋。但現(xiàn)在,每一輛新車都可能裝備前向、后向及四個角雷達(dá),電磁空間的擁擠程度已經(jīng)達(dá)到了一個臨界點。
這種演進(jìn)還伴隨著雷達(dá)架構(gòu)的變革,即從傳統(tǒng)的單輸入單輸出(SISO)向多輸入多輸出(MIMO)技術(shù)跨越。MIMO技術(shù)通過多個發(fā)射和接收天線的組合,形成虛擬天線陣列,極大地提高了雷達(dá)的角度分辨率,使其具備了初步的成像能力。
然而,MIMO系統(tǒng)在提升感知精度的同時,也因為發(fā)射信號的增多而增加了相互干擾的概率。這種復(fù)雜電磁環(huán)境的形成,標(biāo)志著車載雷達(dá)技術(shù)進(jìn)入了一個從單純追求探測性能向追求電磁兼容性和魯棒性轉(zhuǎn)變的新階段。

電磁波交匯下的信號畸變與沖突原因
當(dāng)多輛車在同一時空下行駛,干擾的產(chǎn)生源于“非相干干擾”的過程。簡單來說就是被干擾雷達(dá)接收到了來自其他車輛干擾雷達(dá)直接發(fā)射或經(jīng)環(huán)境反射的信號。這些干擾信號進(jìn)入被干擾雷達(dá)的接收機(jī)后,會參與到信號處理的各個環(huán)節(jié),導(dǎo)致最終生成的環(huán)境圖像發(fā)生畸變。
根據(jù)干擾信號與本車信號在時間-頻率域上的重疊方式,干擾會呈現(xiàn)出背景噪聲的抬升和虛假目標(biāo)的產(chǎn)生兩種截然不同的物理表征。
背景噪聲抬升是目前最普遍的干擾形式。當(dāng)干擾雷達(dá)發(fā)射信號的斜率與被干擾雷達(dá)不一致時,兩者的頻率曲線會在極短的時間內(nèi)發(fā)生交疊。在混頻器中,這種瞬時的頻率碰撞會產(chǎn)生一個在時間上極短但在頻域上分布極廣的脈沖信號。
這種脈沖在雷達(dá)經(jīng)快速傅里葉變換(FFT)處理后,會均勻地散布在整個頻譜空間中,導(dǎo)致原本純凈的背景底噪顯著升高。這種現(xiàn)象的影響是隱蔽而危險的,它并不會讓雷達(dá)徹底死機(jī),但會極大地削弱雷達(dá)探測微弱目標(biāo)的能力。

圖片源自:網(wǎng)絡(luò)
像是遠(yuǎn)處的行人、騎行者或者橫穿馬路的動物等原本反射能量就較低的目標(biāo),其信號會徹底淹沒在被抬升的噪聲基底之下。這種靈敏度的下降意味著車輛的有效安全預(yù)警距離被變相縮短,給自動駕駛系統(tǒng)的決策留下了極大隱患。
更為嚴(yán)重的情況是會產(chǎn)生“鬼影”目標(biāo),這一般發(fā)生在干擾雷達(dá)與被干擾雷達(dá)的波形參數(shù)高度相似的情況下。如果兩個雷達(dá)的掃頻斜率完全相同,且它們在時間軸上恰好保持了一個相對固定的微小偏差,那么干擾信號經(jīng)過混頻后會生成一個頻率恒定的差拍信號。
在被干擾雷達(dá)的處理器看來,這個信號在特征上與真實物體的回波完全一致。于是,雷達(dá)會在感知層面上就會報告一個根本不存在的障礙物。這種虛假目標(biāo)不僅會觸發(fā)車輛不必要的緊急制動,還可能引發(fā)后續(xù)車輛的追尾風(fēng)險。雖然這種參數(shù)完全匹配的極端情況在概率上較低,但在同一品牌或同一方案商大規(guī)模出貨的背景下,大量同型號雷達(dá)會共享相似的默認(rèn)配置,使得這種風(fēng)險從理論可能性轉(zhuǎn)化為實際的道路威脅。
此外,雷達(dá)干擾的強(qiáng)度與車輛間的相對位置、天線輻射特性以及環(huán)境的多徑反射密切相關(guān)。在密集的城市交通中,金屬護(hù)欄、高層建筑以及其他車輛的金屬表面都會成為雷達(dá)波的反射鏡。
這導(dǎo)致干擾信號可能并不直接來自對向車輛,而是經(jīng)過多次反射后,從意想不到的角度射入天線。這種多徑效應(yīng)使得干擾的建模變得異常困難,因為傳感器不僅要處理視距內(nèi)的直接信號,還要應(yīng)對來自整個三維空間內(nèi)反復(fù)反彈的電磁雜波。這意味著,隨著雷達(dá)密度的增加,單純依靠增加天線方向性來抑制干擾的手段已逐漸顯現(xiàn)出其局限性。

毫米波雷達(dá)間的相互干擾會導(dǎo)致什么問題?
雷達(dá)干擾對自動駕駛系統(tǒng)的破壞力,絕不只是在電信號的雜亂上,它會層層傳遞,最終動搖整個感知決策鏈的穩(wěn)定性。在真實行駛場景中,這種干擾可能表現(xiàn)為性能的退化。
舉個例子,在一個大霧彌漫的早晨,自動駕駛系統(tǒng)依賴毫米波雷達(dá)來監(jiān)測前方的路況。如果此時旁邊車道的雷達(dá)干擾導(dǎo)致了本車?yán)走_(dá)的噪聲基底升高了20分貝,那么原本可以在200米外發(fā)現(xiàn)的靜止障礙物,現(xiàn)在可能直到距離50米時才能被雷達(dá)從噪聲中提取出來。這種感知距離的驟降,直接抹殺了毫米波雷達(dá)作為長距離傳感器的核心優(yōu)勢。

圖片源自:網(wǎng)絡(luò)
在某些測試中,就有利用特制的干擾設(shè)備發(fā)射與某主流品牌車輛同頻率的毫米波,可以誘導(dǎo)車輛的自動駕駛功能失效。在測試中,車輛在檢測到障礙物并開始緩慢減速后,由于干擾信號持續(xù)破壞雷達(dá)的差拍信號,導(dǎo)致車輛在最后時刻無法準(zhǔn)確鎖定目標(biāo),從而發(fā)生猶疑后的加速撞擊。
雖然這屬于惡意攻擊的范疇,但它從側(cè)面證明了多車環(huán)境下的電磁干擾如果累積到一定程度,確實能夠讓車輛的感知系統(tǒng)產(chǎn)生嚴(yán)重的邏輯混亂,甚至導(dǎo)致在關(guān)鍵時刻“視而不見”。
除了漏檢和誤檢,干擾還會嚴(yán)重影響目標(biāo)跟蹤的連續(xù)性。在自動駕駛的算法架構(gòu)中,雷達(dá)點云會被輸入到跟蹤器中,通過歷史信息來預(yù)測物體的運動軌跡。當(dāng)互干擾發(fā)生時,雷達(dá)在不同幀之間提取的目標(biāo)特征會變得不穩(wěn)定,導(dǎo)致跟蹤器頻繁發(fā)生掉線或目標(biāo)ID切換。

圖片源自:網(wǎng)絡(luò)
對于高速行駛的車輛來說,這意味著感知系統(tǒng)無法給出一個穩(wěn)定的周邊車輛位置預(yù)期,從而迫使規(guī)劃決策層不斷地進(jìn)行緊急修正,表現(xiàn)出來就是車輛行駛的突兀感增加,舒適性下降,甚至可能因為頻繁的微小修正而引發(fā)失控風(fēng)險。
這種威脅在成像雷達(dá)時代變得更加復(fù)雜。高分辨率雷達(dá)通過輸出密集的點云來勾勒物體的輪廓,而互干擾會在點云圖中引入大量的隨機(jī)噪點,使得原本清晰的卡車輪廓變成一團(tuán)模糊的電磁云霧。
這給后端的深度學(xué)習(xí)識別模型帶來了巨大的挑戰(zhàn),算法可能難以區(qū)分哪些是真實的結(jié)構(gòu)點,哪些是干擾產(chǎn)生的雜點。隨著行業(yè)對感知精度的要求不斷提高,解決干擾問題已經(jīng)從提升用戶體驗的“加分項”,變?yōu)榱藳Q定自動駕駛系統(tǒng)能否在大規(guī)模復(fù)雜城市場景中落地的“必選項”。

如何解決毫米波雷達(dá)之間的相互干擾?
對于上面提到的可能發(fā)生的問題,在雷達(dá)自身的“免疫力”上下功夫是很有必要的,即通過先進(jìn)的數(shù)字信號處理技術(shù),在干擾信號還沒來得及破壞環(huán)境畫像之前就將其剔除。
目前的算法研究主要聚焦于時域重構(gòu)。由于干擾在時域通常表現(xiàn)為持續(xù)時間極短的尖峰脈沖,由此開發(fā)了基于異常值檢測的修復(fù)算法,將受干擾的采樣段進(jìn)行“切除”,然后利用自回歸模型或數(shù)學(xué)插值技術(shù),根據(jù)前后的正常信號推算出被切除部分的原始形態(tài)。這種方法就像是音頻處理中的降噪軟件,能夠有效地壓低因干擾帶來的背景噪聲。
除了基礎(chǔ)的信號修復(fù),更深層的方法是改變信號的調(diào)制方式,賦予每個雷達(dá)獨特的“指紋”。波形隨機(jī)化和頻率跳變技術(shù)正成為行業(yè)標(biāo)配。通過讓雷達(dá)在每一幀發(fā)射時,隨機(jī)改變起始頻率、改變掃頻的斜率或者在脈沖之間加入隨機(jī)的時間抖動,可以大幅降低兩臺雷達(dá)在時頻域長期保持重疊的概率。

圖片源自:網(wǎng)絡(luò)
此外,相位編碼連續(xù)波(PMCW)技術(shù)也被得到應(yīng)用,與FMCW通過頻率變化來測距不同,PMCW利用特殊的數(shù)字編碼(如Golay序列或m序列)對相位進(jìn)行調(diào)制。這種編碼具有極強(qiáng)的正交性,即使其他雷達(dá)發(fā)出了信號,只要編碼不匹配,被干擾雷達(dá)就會將其視為無害的白噪聲,從而在物理層面上消除了產(chǎn)生“鬼影”的可能性。
當(dāng)然,單靠一家廠商的努力很難徹底解決電磁空間的擁堵問題,行業(yè)的標(biāo)準(zhǔn)化與協(xié)同合作正成大勢所趨。目前,全球各大汽車強(qiáng)國都在推動雷達(dá)干擾協(xié)同方案的研究。歐盟的MOSARIM項目、德國的IMIKO項目以及中國的TIAA聯(lián)盟,都在探索如何為雷達(dá)建立一套通用的“交通規(guī)則”。
其中最受關(guān)注的方案包括頻率柵格化和時間槽分配。通過規(guī)定雷達(dá)發(fā)射信號必須對齊特定的頻率起始點(例如每10 MHz一個間隔),可以顯著減少無序發(fā)射帶來的干擾沖突。同時,通過V2X通信技術(shù),車輛之間可以交換各自雷達(dá)的工作狀態(tài),實現(xiàn)空間、時間或頻率上的動態(tài)避讓。

最后的話
毫米波雷達(dá)的相互干擾雖然是多車環(huán)境下不可避免的物理挑戰(zhàn),但它并非不可逾越的障礙。隨著信號處理算法從簡單的濾波向復(fù)雜的信號重構(gòu)演進(jìn),以及調(diào)制技術(shù)從線性調(diào)頻向數(shù)字編碼跨越,雷達(dá)系統(tǒng)的抗干擾能力正在經(jīng)歷質(zhì)的飛躍。
審核編輯 黃宇
-
自動駕駛
+關(guān)注
關(guān)注
794文章
14930瀏覽量
180640 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
109文章
1164瀏覽量
66322
發(fā)布評論請先 登錄
4D毫米波雷達(dá)是如何識別高度信息的?

4D毫米波雷達(dá)為什么稱為激光雷達(dá)的“替身”?
看不見的引擎:毫米波雷達(dá)線圈如何驅(qū)動自動駕駛
微波雷達(dá)和毫米波雷達(dá)有什么區(qū)別
全國產(chǎn)化毫米波雷達(dá)模組技術(shù)解析及智能感知應(yīng)用方案指南
車載毫米波雷達(dá)的工作原理和功能
德賽西威參與制定車載毫米波雷達(dá)國家標(biāo)準(zhǔn)
恩智浦如何釋放毫米波雷達(dá)的技術(shù)潛力
毫米波雷達(dá)重塑煤礦感知能力


CAN XL通信技術(shù)在車載毫米波雷達(dá)中的應(yīng)用(1)

毫米波雷達(dá)在自動駕駛中有何關(guān)鍵作用?
自動駕駛毫米波雷達(dá)之間會相互干擾嗎?

多毫米波雷達(dá)的實車連續(xù)測量應(yīng)用案例
ADAS和防撞系統(tǒng)中的毫米波雷達(dá)方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論