 新加坡國立大學、西交利物浦、蘇州大學:研究一種受貓頭鷹視覺啟發的類腦視覺傳感器
新加坡國立大學、西交利物浦、蘇州大學:研究一種受貓頭鷹視覺啟發的類腦視覺傳感器

01
內容概覽
現有技術缺點
CMOS弱光性能差:僅能感知1.0勒克斯照明,難檢測夜間/深空微弱光信號。
傳統計算能耗高:“感知-處理分離”架構(如GPU)能耗比生物系統高9個數量級。
神經形態器件適應性差:弱光靈敏度低,無法模擬貓頭鷹暗適應機制。
文章亮點
光電解耦雙模設計:模擬貓頭鷹暗適應,三端晶體管結構(絕緣聚合物包覆層+光吸收層)增強光敏性,并行光子感知與電學可塑性仿真。
超高弱光探測:主動適應指數331,感知0.146 nW·cm?2弱光(較CMOS提升3個數量級)。
穩定突觸可塑性:循環LTP/LTD,支持0.146~11.7 nW·cm?2光強跨3種神經網絡部署權重。
類腦系統集成:無人機空對地識別系統,0.146~11.7 nW·cm?2下識別準確率>95%。
應用場景
夜間監控:城市安防、邊境巡邏無輔助照明目標識別。
無人機搜救/探測:夜間搜救、深空(月球/火星)物質識別。
精密制導:導彈、衛星暗光環境目標跟蹤。
總結
在光子匱乏環境中被動目標探測對于擴展機器視覺在精密制導、智能監控和預警等眾多應用中的能力至關重要。 在此,受貓頭鷹視覺的啟發,作者報道了一種具有光電解耦機制的雙模突觸晶體管,能夠實現并行的光子感知與電學可塑性仿真。由此,該器件表現出約331的高主動適應指數,并具有感知低至0.146 nW cm?2的微弱光強的能力。作者還實現了具循環穩定性的突觸權重調制,呈現出長期的增強與抑制行為,并通過自適應對比度增強驗證了在0.146–11.70 nW cm?2光強范圍內跨三種基礎人工神經層次部署權重的可行性。該受貓頭鷹視覺啟發的器件為面向能效化與低光圖像處理的類腦視覺傳感器奠定了硬件基礎。
02
圖文簡介

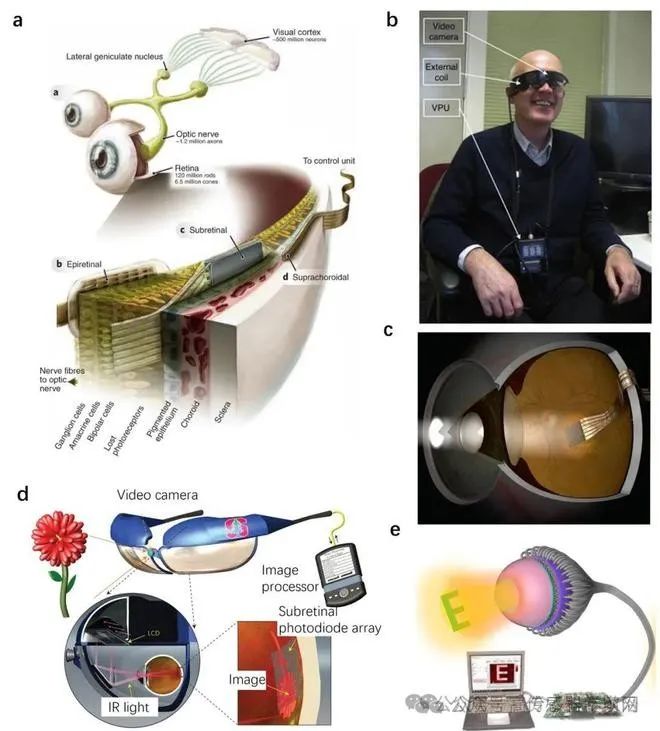
圖1. 受貓頭鷹啟發的類神經形態近傳感器計算。(a) 貓頭鷹視神經生物學突觸傳遞示意圖。通過神經遞質釋放和突觸權重調節對脈沖信號(突觸后電流,PSC)在時空上的積分。 (b) 人造神經系統實現。近傳感器計算架構(左)模擬生物信號的感知與處理,人工神經網絡(右)通過可編程權重模擬突觸可塑性。 (c) 光適應閾值示意圖。對比互補金屬氧化物半導體(CMOS)光電感受器器件(約1 lux,對應于555nm處約10^7 Wcm^-2的光強)、人類夜視(10^-2 到 10^-1 lux,對應于555 nm處約10^-9–10^-8 W cm^-2的光密度)和倉鸮夜視(約10^-3 lux,對應于555 nm處約10^-10 W cm^-2的光強)的光敏范圍。 (d) 貓頭鷹夜間光感受自適應機制示意圖。隨著光照持續時間增加,時間依賴的光敏性(P(t))上升,視網膜視桿細胞的暗適應使得目標成像逐步清晰。 (e) 自主無人機應用示意圖:將光學感測、視覺自適應和類神經形態計算集成,可在光子稀缺環境中無需輔助照明和后處理技術實現目標檢測。

圖2. ODAS結構表征與光適應性能。(a) ODAS三維結構示意圖:自下而上依次為ITO柵電極、PVA介電層(120nm)、PVCn:PbS納米晶光吸收層(100 nm)、Ag源/漏電極(100 nm)及C8-BTBT溝道層(50 nm)。(b) 橫截面透射電子顯微鏡(TEM)圖像(比例尺:25 nm)及相應的能譜(EDS)映射圖(比例尺:25 nm)。(c) PVCn:PbS納米晶摻混薄膜與C8-BTBT溝道的吸收光譜。(d) 光適應機制的動態過程:光激發在PVCn:PbS層產生電子—空穴對(左);在柵電壓作用下電子—空穴對分離,空穴被界面陷阱態俘獲并在溝道界面處累積(中);去除光刺激后,載流子被重新俘獲并復合,完成類似視桿細胞的光適應循環(右)。(e) 在不同照度(0.146–11.7 nWcm?2)下隨適應時間增加的漏極電流(IDS),展示對光強的自適應能力。(f) 在不同適應時間(1–30 s)下,光敏度(Pt)與照度的關系。(g) 主動適應指數(AAI)與光照強度的相關性。

圖3. ODAS 陣列的電路結構與性能表征。(a) ODAS 陣列的示意圖。 (b) 1 9 × 1 7 ODAS 陣列的光學圖像(比例尺:2 mm)及單器件放大圖(比例尺:50 μm)。 (c) 等效電路拓撲:交叉陣列結構由位線、字線和漏極電壓構成。 (d) 器件間 IDS–VG雙向掃描曲線。 (e) 陣列上器件閾值電壓的空間分布。 (f) 陣列開關比均勻性的分析。統計分布呈高斯特征(μ = 3.12,σ = 0.05)。 (g) ODAS 陣列上動態光適應過程的可視化。以定向方式對陣列施加光刺激以形成字母“X”、“J”、“T”、“L”和“U”。被激活器件的光電流在適應過程中逐漸增加。

圖4. ODAS 的光控突觸特性。(a) ODAS 光突觸測試示意圖,光脈沖從器件底部的透明柵極輸入。 (b)光電突觸對輸入光脈沖表現出非易失響應。輸出電流的變化表明其記憶信息的能力。 (c) ODAS 對不同波長光脈沖(365nm、470 nm、590 nm 和 940 nm)的非易失光電流響應。 (d) ODAS 在不同照度下(0.73 nW cm?2、1.46 nW cm?2 和 4.38 nW cm?2)對光脈沖的非易失光電流響應。 (e) 光刺激后光電流的衰減速率。 (f) 在940 nm、超低光強0.146 nW cm?2 條件下的 ODAS 持續光電電流(PPC)。 (g) 在能量消耗與弱光檢測能力方面,ODAS 與已報道的光電突觸器件的比較。 (h) ODAS 的光子信息再記憶能力測試。

圖5. 使用電脈沖進行的突觸特性測試。(a) ODAS 電脈沖測試示意圖。脈沖輸入由柵極電壓調控。 (b) 興奮性突觸后電流(EPSC)的動態響應。在基線電壓(0.2 V)與峰值電壓(1.2 V)交替施加脈沖(脈寬500ms)作用下,0–16 s 區間內 EPSC 呈階梯狀上升,與長時程增強(LTP)的線性動力學一致。 (c) 幅度依賴的電脈沖沖突突觸電流測試。在固定脈寬500 ms、頻率1Hz條件下,比較不同脈沖幅值(1.0 V、1.5 V 和 2.0 V)下 EPSC振幅的變化。 (d) LTP 與長時程抑制(LTD)循環特性。峰值電壓在 1.2 V 與 -0.2 V 之間切換,表現出 30 個循環的穩定性。 (e) LTP–LTD 循環測試的高 PSC 值與低PSC值的箱線圖(n = 30)。箱線圖中,水平中線表示中位數,下四分位數與上四分位數分別表示第25百分位與第75百分位,須端表示最大值與最小值。 (f)浮點權重與 4 位離散權重的硬件映射示意圖。神經網絡全連接層的權重矩陣通過突觸電導值在物理上進行編碼。 (g) 基于 ODAS 的多層感知器(MLP)在MNIST數據集上的 4 位仿真性能:測試準確率達到 90%(藍色曲線),訓練損失值隨迭代次數增加收斂至 0.12(橙色曲線)。

圖6. 智能目標識別應用示意圖。(a) 使用無人機模擬灰林鸮進行夜間空對地識別的示意圖。 (b) 無人機在五個亮度等級下對目標進行光學捕獲的示意圖。 (c)均方根對比度與適應時間的關系。圖像的均方根對比度可基于圖像灰度值映射到不同光強下的歸一化光電流來定義。 (d) 在不同照度水平仿真數據集上對YOLOv5網絡的訓練過程,隨著訓練周期增加網絡損失值收斂。 (e) 在不同訓練輪次下精確度、mAP_0.5和mAP_0.5:0.95的變化趨勢。 (f) 適應過程中對比度變化對目標識別置信度的影響。 (g) ODAS 與已報道的用于識別仿真的光學突觸器件的比較。
審核編輯 黃宇
-
視覺傳感器
+關注
關注
3文章
276瀏覽量
23867
發布評論請先 登錄
南京工業大學,新加坡國立大學,國家納米科學技術中心,安徽大學:研究基于金屬有機框架的氣體傳感器

華芯微電子獲評蘇州大學優秀社會實踐基地
新加坡國立大學:研發用于水下傳感應用的自激式線性神經形態柔性壓力傳感器

Keysight與新加坡研究機構合作推進量子計算研究
國芯科技與西交利物浦大學啟動2025年度蘇州市關鍵核心攻關項目
首爾國立大學:研究生物啟發型離子傳感器:將自然機制轉化為傳感技術

時識科技DAVIS346傳感器助力清華大學突破LIBS技術瓶頸
時識科技牽頭制定動態視覺傳感器性能測試方法國家標準
全北國立大學:研究可穿戴汗液傳感貼片,用于無創連續健康監測

類腦視覺芯片里程碑突破:復旦團隊首創二維半導體DRAM仿生神經元

蘇州大學校長一行到訪思必馳參觀交流
北京理工大學:研究眼機界面智能傳感硬件——從可穿戴到仿生




 工商網監
工商網監
評論