 面向視覺語言導航的任務驅動式地圖學習框架MapDream介紹
面向視覺語言導航的任務驅動式地圖學習框架MapDream介紹

MapDream
地圖不再是專家設計的產物
而是在任務目標下學習出的決策參考
在視覺語言導航(VLN)中,地圖長期作為獨立模塊構建,并通過固定接口交由導航策略使用。無論是BEV網格、拓撲圖還是語義記憶模塊,這些表示大多脫離策略學習而設計。結果是,機器人即使掌握場景的信息,也仍可能繞行甚至偏離目標,因為地圖中編碼的,并不一定是決定導航成功的關鍵信息。
我們認為,VLN邁向長期可靠決策的關鍵一步,是讓地圖表示進入訓練閉環,由任務目標在學習階段主導其形成方式,而不再停留在固定規則或外部模塊的層面。
MapDream正是沿著這一方向提出的:我們將地圖構建納入端到端訓練框架,在大規模數據支撐下,通過監督預訓練與強化學習聯合微調,使空間表示在訓練階段始終圍繞導航目標展開,并與策略決策緊密耦合,從而形成真正服務于長程指令執行的核心中間表示。
? 論文題目:
MapDream: Task-Driven Map Learning for Vision-Language Navigation
?論文鏈接:
https://arxiv.org/abs/2602.00222
? 項目主頁:
https://horizonrobotics.github.io/robot_lab/mapdream
從專家設計到任務主導
傳統VLN系統中的地圖通常依賴專家規則或獨立建圖模塊生成,其語義與幾何結構在訓練過程中保持固定。導航策略只能被動消費這些表示,無法反向影響地圖該強調哪些空間線索。MapDream打破了這一結構:我們在大規模數據支撐下,將地圖構建納入端到端訓練框架,通過監督預訓練與強化學習聯合微調,使空間表示直接圍繞導航目標學習。VLN中真正重要的,并非完整復原環境,而是為當前任務生成最有價值的空間接口。

MapDream將地圖表示納入訓練閉環,由任務直接塑造,而非專家預設。
在MapDream中,地圖被重新定義為一種可學習的中間表示。系統接收多幀單目觀測與自然語言指令,自回歸生成任務相關的BEV表示,僅保留三類與決策高度相關的要素——可通行結構、目標相關距離以及語義錨點。這種緊湊表達被輸入到VLN策略中用于多步動作預測,并在強化學習階段與策略同步優化,使最終得到的地圖分布與成功導航行為保持一致。
兩階段訓練
讓地圖真正進入學習閉環
MapDream采用兩階段訓練流程,使地圖從專家先驗出發,最終由任務目標決定。

MapDream采用兩階段訓練:先建立建圖—控制接口,再以強化學習聯合優化,使地圖服務于導航決策而非幾何重建。
第一階段是監督預訓練。通過輕量化的任務驅動BEV監督,模型學習基礎空間抽象,同時訓練策略學會使用這些地圖進行決策,從而建立穩定的“建圖—控制”接口。
第二階段是強化學習聯合微調。地圖模塊與VLN策略在統一導航獎勵下同步更新。此時地圖不再僅追求幾何一致性,而是被任務回報直接牽引,系統性地調整為最有利于完成指令的空間表達。
通過這一閉環過程,地圖真正成為由任務目標主導學習的核心表示。
任務決定地圖
改變機器人的導航方式
當地圖表示進入學習閉環后,機器人的行為模式發生了顯著變化。在長程指令執行中,它不再僅依賴局部觀測,而是借助生成的BEV抽象形成更穩定的全局方向感。路徑更加貼近示范軌跡,回溯與繞行明顯減少,整體執行呈現出更強的空間連貫性。

MapDream僅憑單目生成緊湊BEV地圖,緊貼真實路徑,優于在模糊路口易偏離的無地圖基線。
在標準VLN基準中,MapDream在單目設置下取得領先結果,并在跨數據集泛化與真實機器人實驗中保持穩定表現。這表明,由任務目標塑造的地圖能夠捕捉具有遷移性的空間結構,而不僅僅適配單一環境。

在R2R-CE與RxR-CE Val-Unseen上,MapDream單目性能最佳,路徑效率優于全景方法。
總結與展望
MapDream重新界定了視覺語言導航中“地圖”的角色。它不再是專家規則主導的靜態模塊,而是一種在訓練階段由任務目標塑造、并與決策系統端到端耦合的生成式空間接口。機器人在決定“下一步往哪走”之前,先通過地圖理解當前最關鍵的空間關系,從而形成更高效、更穩定的長程決策能力。
未來,我們希望將這一任務驅動地圖學習范式擴展到更長期的空間記憶、更復雜的交互任務以及真實環境中的自主探索,為具身智能構建真正以任務目標為核心的空間認知系統。
-
機器人
+關注
關注
213文章
31240瀏覽量
223081 -
導航
+關注
關注
7文章
578瀏覽量
44004 -
地圖
+關注
關注
0文章
43瀏覽量
13998
原文標題:開發者說|MapDream:讓導航任務決定地圖如何生成,而不應由專家預設
文章出處:【微信號:horizonrobotics,微信公眾號:地平線HorizonRobotics】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
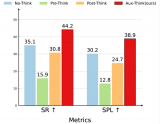
Progress-Think框架賦能機器人首次實現語義進展推理

iMLite AI Map 2.1 正式上線:智能穿戴迎來嵌入式離線地圖導航新體驗

沒有地圖,純視覺自動駕駛就只能摸瞎嗎?

隱式地圖:自動駕駛的“數字直覺“

Aux-Think打破視覺語言導航任務的常規推理范式
UI開發概述
鴻蒙5開發寶藏案例分享---一多開發實例(地圖導航)
谷歌地圖GPS定位
高德地圖攜手雷鳥創新打造新一代AI+AR智能導航解決方案
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
一種實時多線程VSLAM框架vS-Graphs介紹




 工商網監
工商網監
評論