 驅動-緩沖-感知一體化:仿生腿式起落架如何重塑多旋翼無人機復雜地形著陸范式
驅動-緩沖-感知一體化:仿生腿式起落架如何重塑多旋翼無人機復雜地形著陸范式

低空經濟正從科幻概念轉變為現實產業,成為全球范圍內驅動區域經濟轉型與產業升級的重要力量。中國政府已將低空經濟納入國家發展戰略,標志著這一新興產業正迎來爆發式增長。預計到2029年,中國商用無人機市場規模將達到3000億元人民幣,五年內復合增長率達19.5%。在這一廣闊市場前景下,多旋翼無人機因其垂直起降靈活性、操作便捷性以及環境適應能力強等優勢,在低空飛行領域得到廣泛應用,特別是在物流運輸、環境監測、應急救援等領域發揮著日益重要的作用。
第一章 多旋翼飛行器發展機遇與著陸技術挑戰
從技術構型來看,多旋翼構型相比固定翼和復合翼具有結構相對簡單、控制邏輯成熟、懸停效率高等特點,主要適用于短途、低速的城市內交通和精細化作業任務。全球多旋翼無人機市場呈現出多元發展趨勢,其中四旋翼機構因簡單的四電機架構、低廉的物料成本和成熟的飛控生態系統,占據了2024年多旋翼無人機市場59.42%的份額。然而,隨著應用場景的不斷拓展,市場對八旋翼及更重型平臺的需求正以18.88%的年復合增長率快速攀升,這主要源于對更高有效載荷、冗余安全性以及復雜作業能力的需求。
盡管多旋翼飛行器市場前景廣闊,但其在實際應用中仍面臨諸多技術挑戰。當前無人機商業化應用的主要限制集中在電池能量密度、飛控與傳感技術以及信號傳輸三個方面。尤其是在復雜環境下的安全著陸問題,逐漸成為制約多旋翼飛行器廣泛應用的關鍵瓶頸之一。
傳統多旋翼飛行器通常采用滑橇或撐桿等固定式起落架,這類起落架雖然結構簡單、重量輕,但對著陸環境要求較為苛刻,通常需要平坦且穩定的起降平臺。在崎嶇地形、斜坡和非均質地面等復雜環境下,傳統起落架難以有效適應地形變化,可能導致機身姿態不穩定,沖擊緩沖能力不足,甚至在極端著陸條件下發生側翻或結構破壞等嚴重事故。特別是在農業植保、山地救援、電力巡檢等典型應用場景中,多旋翼飛行器往往需要在非結構化地形上執行起降任務,傳統起落架的局限性更加凸顯。
隨著低空經濟的深入發展,無人機應用場景不斷拓展至城市物流、應急救援、邊境巡邏等更加復雜的環境,對著陸系統的適應性和緩沖能力提出了更高要求。因此,提升低空多旋翼飛行器在復雜環境中的著陸適應性與緩沖能力,成為提高其任務執行能力和安全性的關鍵挑戰,也是低空經濟可持續發展必須解決的核心技術問題之一。
第二章 自適應起落架研究現狀與技術挑戰
2.1 傳統固定式起落架的局限性分析
傳統固定式起落架主要采用剛性結構設計,依賴被動阻尼元件(如彈簧、液壓減震器)吸收著陸沖擊能量。這種設計理念源于有人航空器,但在多旋翼無人機等低空飛行器上存在明顯局限性:首先,結構固定導致無法主動適應地形變化,在崎嶇地面上往往只有部分支腿接觸地面,造成機身傾斜甚至翻倒;其次,被動緩沖無法根據著陸條件動態調整緩沖特性,面對不同著陸速度、機身質量和地面條件時,難以實現最優緩沖效果;第三,剛性連接將地面沖擊直接傳遞至機身結構,容易導致機載設備損壞或結構疲勞損傷。
這些局限性在復雜作業環境中尤為突出。例如,在農業植保作業中,無人機需要在田埂、坡地等不規則地形上頻繁起降;在電力巡檢任務中,飛行器可能需要在山地、森林等非結構化環境中緊急降落;在城市物流配送場景下,無人機則需適應屋頂、陽臺等有限且不規則的著陸平臺。在這些應用場景下,傳統固定式起落架往往難以保證安全、穩定的著陸,限制了多旋翼飛行器的作業能力和應用范圍。
2.2 自適應起落架的技術演進與研究進展
為克服傳統起落架的局限性,國內外研究團隊從多個角度提出了自適應起落架解決方案,主要包括仿生結構設計、主動控制系統和集成化架構三個方向:
仿生結構設計方面,研究人員借鑒自然界生物的運動機理,提出了多種仿生起落架構型。Manivannan等設計了一種具有兩自由度的機器人腿式起落架,通過落震仿真和坡度極限分析驗證了其在斜坡地形上的適應性。Liu等基于鷹爪特性設計了仿生多指地形自適應無人機,實驗證明了其在斜坡、臺階和非結構化地形上的穩定著陸能力。此外,還有研究團隊借鑒蝗蟲后腿結構、螳螂被動適應機制以及鳥類爪部肌腱鎖定系統等生物力學原理,開發了多種具有地形適應能力的仿生起落架。
主動控制系統方面,研究者們將機器人控制理論應用于起落架系統,實現了對地面接觸力的主動調節。Tian等針對無人直升機提出了一種線纜驅動的腿式起落架,并結合機身控制和接觸力優化設計了控制系統,以減少各著陸腿的沖擊載荷。Ni等基于六旋翼四足飛行器,利用零力矩點穩定距離和旋翼-地面間隙作為著陸安全判據,探索了飛行器穩定著陸的地形限制邊界。Boix等結合拉格朗日和牛頓-歐拉方法對系統動力學進行建模,引入接觸模型模擬地面相互作用力,并通過水平控制器保持飛行器姿態。
集成化架構方面,研究趨勢逐漸從單點技術創新轉向系統集成優化。任佳等基于多連桿機構設計了自適應起落架,并通過控制算法和動力學建模仿真驗證了該起降系統在復雜地形上的可行性。Tang等設計了一種具有三條運動支鏈的起落架機構,構建了虛擬等效并聯機構模型,用于研究機構與地形之間的相互作用及穩定性。這些研究體現了結構設計與控制策略協同優化的新趨勢。
2.3 當前研究存在的技術空白與挑戰
盡管自適應起落架研究取得了顯著進展,但現有技術方案仍面臨諸多挑戰:首先,結構與控制協同不足,多數研究側重于機械結構優化或控制算法設計,缺乏二者深度融合的集成解決方案;其次,能量效率較低,主動控制系統往往需要消耗大量能量,影響飛行器的續航能力;第三,系統復雜度高,多自由度機構與復雜控制算法增加了系統的開發、調試和維護難度;第四,環境感知能力有限,多數系統缺乏對地形特征的實時精確感知,難以實現真正意義上的智能自適應。
特別是在緩沖性能優化方面,當前研究仍存在明顯不足。大多數自適應起落架仍依賴被動緩沖元件或半主動控制方式,難以在復雜地形與多變著陸條件下實現最優緩沖效果。而主動控制系統則多采用傳統的力/位混合控制或阻抗控制框架,缺乏針對多旋翼飛行器著陸過程的專用控制策略。這種局限性導致飛行器在著陸過程中仍可能面臨較大的沖擊載荷和姿態不穩定問題,影響了其在復雜環境下的安全性和可靠性。
因此,如何設計一種結構緊湊、控制高效、適應性強的起落架系統,實現多旋翼飛行器在復雜環境下的安全穩定著陸,成為當前低空飛行器技術領域亟待解決的關鍵問題。本文正是在這一背景下,詳細介紹一種驅動緩沖一體化的仿生腿式起落架方案,并基于主動柔順控制理論設計了相應的緩沖控制策略。
第三章驅動緩沖一體化仿生腿式起落架構型設計
3.1 仿生設計理念與生物學基礎
自然界中的四足或多足動物在復雜地形運動方面展現出卓越的適應能力,這為無人機起落架設計提供了豐富的靈感來源。本方案特別借鑒了蝗蟲后腿的結構與運動機理,蝗蟲后腿主要由基節、股節、脛節以及附節組成,其中股節內包含脛節屈肌和羽狀伸肌,用以驅動脛節運動。這種生物結構具有幾個顯著優勢:首先,輕量化設計,通過優化的材料分布和空心結構實現高強度低重量;其次,能量高效存儲與釋放,肌腱和肌肉系統能夠有效存儲和釋放彈性能量;第三,快速響應能力,神經系統與肌肉系統的協同工作實現了毫秒級的運動響應;第四,環境適應性,通過關節角度調節和足部姿態調整,能夠適應各種不規則表面。

3.2 仿生腿式起落架構型設計
基于蝗蟲后腿的仿生學原理,介紹一種四足仿生腿式起落架。該起落架構型采用四腿對稱布局,在穩定性、重量及成本等方面實現了較優平衡。每條著陸腿包含三個主動關節:基關節、股關節和脛關節,分別對應蝗蟲后腿的基節、股節和脛節,實現了三自由度空間運動能力。
起落架結構設計特別注重輕量化與驅動集成化。基節作為腿部與機身的連接部件,承擔主要的結構支撐功能,其上集中布置了三個關節電機。這種集中式布局將重量集中在靠近機身重心的位置,顯著減小了著陸腿的運動慣量,降低了腿部運動對機體穩定性的影響。股節與脛節采用高強度輕質材料(如碳纖維復合材料)制造,進一步減輕了整體重量。脛節的驅動方式特別借鑒了蝗蟲后腿的運動機理,采用四連桿機構替代傳統的直驅方式,提高了傳動效率和控制精度。
足端設計是起落架構型的關鍵組成部分,本方案對蝗蟲附節進行了適當簡化,采用高摩擦柔性材料(如聚氨酯彈性體)包裹足端接觸面。這種設計具有多重優勢:首先,高摩擦系數增強了足端與地面之間的附著力,防止著陸過程中的滑動;其次,柔性材料能夠吸收高頻振動和微小沖擊,保護機身精密設備;第三,簡化結構降低了系統復雜度,提高了可靠性;第四,模塊化設計便于磨損更換和維護保養。
3.3 單腿運動學建模與分析
腿式起落架單腿運動學是整個系統運動控制的基礎,由于每條著陸腿構型相同,完成單腿運動學分析即可實現整個起落架系統的運動學建模。基于設計的腿式起落架構型,建立了腿部各關節和足端點位置的關系,包括正運動學和逆運動學分析。
基于單腿運動學模型,進一步分析了整機的地形適應能力。四腿起落架采用中心對稱布局,相鄰足端水平間距為725 mm,結合足端的垂向運動范圍計算可得,該起落架能夠適應0°-16°坡度的地形。這一地形適應范圍覆蓋了大多數丘陵、山地等復雜地形,顯著擴展了多旋翼飛行器的作業范圍和應用場景。
3.4 結構優化與輕量化設計
為滿足多旋翼飛行器對重量和尺寸的嚴苛要求,本方案在起落架構型設計中實施了多項優化措施。首先,通過拓撲優化技術對腿部結構進行輕量化設計,在保證強度和剛度的前提下,最大限度地減少材料用量。優化過程中特別考慮了著陸沖擊載荷的分布特性,確保結構在極端工況下的安全性。
其次,采用多功能集成設計理念,將傳感器、驅動器和結構件有機整合。例如,將關節編碼器、力矩傳感器與電機一體化設計,減少了額外安裝空間和連接部件;在結構內部布置線纜通道,保護信號線和電源線免受外部環境影響;利用結構空腔作為散熱通道,提高電子器件的熱管理能力。
第三,實施模塊化設計策略,將起落架系統分解為基座模塊、腿部模塊和足端模塊等標準化組件。這種設計不僅便于制造和裝配,還支持快速更換和維護,提高了系統的可維護性和可用性。此外,模塊化設計還為不同應用場景下的配置調整提供了靈活性,用戶可根據具體需求選擇不同長度、剛度的腿部模塊。
最后,通過材料選擇與工藝優化進一步減輕系統重量。主要承力部件采用碳纖維復合材料,在關鍵連接部位使用鈦合金緊固件,在非承力部位使用工程塑料。制造工藝上,采用3D打印技術制造復雜形狀部件,減少連接件數量和裝配難度,同時優化了應力分布,提高了結構可靠性。
第四章仿生腿式起落架動力學建模與實驗驗證
4.1 起落架系統動力學建模
為準確描述仿生腿式起落架在著陸過程中的動態行為,本方案建立了完整的系統動力學模型。建模過程采用多體動力學方法,將起落架系統分解為機身、腿部連桿和關節等剛體組件,通過約束方程描述各組件之間的運動關系。動力學模型特別考慮了以下幾個關鍵因素:
關節摩擦與間隙效應:實際機械系統中存在的關節摩擦和傳動間隙會顯著影響系統的動態響應。模型采用庫侖摩擦+粘性摩擦的組合模型描述關節摩擦,通過等效彈簧-阻尼系統模擬傳動間隙的影響。這些非線性因素的引入提高了模型的預測精度,為控制算法設計提供了更真實的被控對象描述。
驅動器動力學特性:關節電機的動態響應直接影響起落架系統的整體性能。模型包含了電機繞組的電氣動力學、轉子機械動力學以及減速器的傳動特性,特別考慮了電機轉矩飽和、速度限制等非線性約束。驅動器模型的引入使仿真分析能夠更準確地預測實際系統中的力矩響應和帶寬限制。
地面接觸動力學:足端與地面之間的接觸相互作用是著陸過程的核心物理現象。模型采用等效連續接觸模型描述法向接觸力,將離散的碰撞過程近似為連續的非線性彈簧-阻尼系統。切向摩擦力則采用LuGre摩擦模型,能夠準確描述靜摩擦向動摩擦轉變的過程以及粘滑現象。接觸模型參數的確定基于典型地面材料(如土壤、混凝土、草地)的力學特性測試數據,確保了模型的環境適應性。
多物理場耦合效應:實際著陸過程中存在多種物理場的相互作用,包括結構變形與振動、空氣動力學干擾、熱效應等。模型通過簡化但物理意義明確的方式考慮了這些耦合效應,如通過等效質量-彈簧系統模擬結構柔度的影響,通過經驗公式估算地面效應引起的空氣動力變化。
4.2 整機著陸動力學建模
在單腿動力學模型基礎上,進一步建立了包含飛行器機身、旋翼系統和起落架系統的整機著陸動力學模型。整機模型考慮了以下幾個關鍵動力學因素:
旋翼氣動力與反扭矩:多旋翼飛行器的旋翼系統不僅提供升力,還產生顯著的反扭矩和陀螺效應。模型基于葉素動量理論計算各旋翼的氣動力,考慮了旋翼之間的氣動干擾以及地面效應引起的升力變化。反扭矩模型則反映了電機轉速變化對機身姿態的擾動影響,為著陸過程中的姿態穩定控制提供了基礎。
機身柔性效應:實際飛行器機身并非完全剛體,在著陸沖擊作用下會產生彈性變形和振動。模型通過模態疊加法簡化描述機身的柔性特性,保留了主要低階模態對系統動態響應的影響。這種處理方式在保證模型精度的同時,顯著降低了計算復雜度,便于實時控制算法的設計與驗證。
質量分布與慣量特性:飛行器的質量分布和慣量特性直接影響著陸過程中的動力學行為。模型詳細考慮了電池、傳感器、載荷等關鍵部件的實際安裝位置和質量參數,基于三維CAD模型計算了系統的質量矩陣和慣量張量。這些慣性特性參數是著陸穩定性分析和控制參數整定的重要依據。
傳感器與執行器動力學:控制系統的實際性能受到傳感器測量特性和執行器響應能力的限制。模型包含了主要傳感器(IMU、關節編碼器、足端力傳感器)的測量噪聲、延遲和帶寬特性,以及執行器(關節電機)的響應延遲和飽和特性。這些實際約束的考慮使仿真結果更貼近真實系統的表現,提高了控制算法設計的可靠性。
第五章 基于主動柔順控制的緩沖策略設計與實現
5.1 阻抗控制理論基礎
阻抗控制作為一種典型的主動柔順控制方法,通過模擬質量-彈簧-阻尼系統的動態特性,實現對環境交互力的有效調節。其核心思想是在機器人末端執行器與環境之間建立期望的動態關系,而不是直接控制位置或力。
在著陸緩沖場景中,阻抗控制的三個關鍵參數具有明確的物理意義:剛度系數Kd決定了系統對外部擾動的抵抗能力,高剛度意味著系統對外部位置變化產生較大的反作用力;阻尼系數Bd影響系統的能量耗散速率,決定了沖擊響應的振蕩特性和收斂速度;慣性系數Md反映了系統的加速特性,影響對力變化的響應速度。通過合理調節這三個參數,可以使起落架系統呈現出從剛性到柔性的連續特性變化,適應不同著陸條件下的緩沖需求。
5.2 基于力的阻抗控制策略設計
采用基于力的阻抗控制框架,以力閉環為內環,阻抗控制環為外環構建控制系統。這種架構的優勢在于能夠直接控制足端與地面之間的接觸力,實現精確的力跟蹤性能,特別適合著陸緩沖這種力控優先的應用場景。
控制系統設計包含以下幾個關鍵環節:
期望阻抗模型設計:根據多旋翼飛行器的著陸動力學特性,設計了兩階段阻抗模型。第一階段(預接觸階段)采用低剛度、中等阻尼的參數配置,實現足端與地面的柔順接觸;第二階段(緩沖階段)根據接觸力反饋動態調整阻抗參數,實現最優沖擊吸收。模型參數基于飛行器質量、著陸速度和地面剛度等先驗信息進行初步整定,并通過在線自適應機制進行微調。
力/位混合控制架構:考慮到著陸過程中不同階段的控制重點不同,系統采用力/位混合控制架構。在垂直方向(主要沖擊方向)采用基于力的阻抗控制,精確調節足端接觸力;在水平方向(側向穩定方向)采用基于位置的阻抗控制,維持機身姿態穩定。這種混合架構在保證緩沖性能的同時,提高了系統的姿態穩定能力。
關節空間映射算法:阻抗控制器在操作空間(足端)生成期望的力/位指令后,需要通過逆動力學計算轉換為關節空間的力矩指令。采用加權偽逆雅可比矩陣方法解決冗余驅動問題,在滿足足端力控制要求的同時,優化關節力矩分配,避免個別關節過載,提高系統整體可靠性。
前饋補償機制:為改善力控制系統的動態響應,在基本阻抗控制回路基礎上增加了前饋補償環節。前饋信號基于機身運動狀態和地面剛度估計生成,提前預測接觸力變化趨勢,補償系統的相位滯后,提高力跟蹤精度和響應速度。
5.3 單腿著陸緩沖仿真分析
為驗證主動柔順控制策略對起落架著陸緩沖性能的提升效果,首先進行了單腿著陸緩沖仿真分析。仿真設置著陸腿觸地速度為2 m/s,地面接觸模型參數設置為:接觸剛度Kn=3000N/mKn=3000 N/m、接觸阻尼Dn=300N/(m?s?1)Dn=300 N/(m?s?1)、動摩擦系數μm=0.5μm=0.5、靜摩擦系數μs=0.7μs=0.7。
仿真比較了三種緩沖策略的性能差異:無緩沖策略(各關節鎖死,剛性接觸);關節緩沖策略(基于電機三環PID控制的位置緩沖);主動柔順控制策略(基于阻抗控制的力/位混合控制)。評價指標包括機體過載系數(加速度與重力加速度比值)、關節峰值扭矩和能量吸收效率。
仿真結果表明,主動柔順控制策略在各項指標上均表現最優。在機體過載方面,無緩沖策略峰值達到17g,關節緩沖策略為10g,而主動柔順控制策略僅為3g,相比前兩者分別降低了82.4%和70%。在關節扭矩方面,股關節峰值扭矩從無緩沖的112.5 N·m降低到主動柔順控制的24.2 N·m,降幅達78.5%;脛關節峰值扭矩從16.3 N·m降低到3.8 N·m,降幅達76.7%。這些數據充分證明了主動柔順控制在降低沖擊載荷方面的顯著優勢。
進一步分析表明,主動柔順控制的優勢不僅體現在峰值載荷的降低,還表現在沖擊過程的平順性。無緩沖策略和關節緩沖策略的載荷曲線均出現劇烈波動,表現出明顯的沖擊特性;而主動柔順控制的載荷曲線變化平穩,沖擊能量被更均勻地吸收和耗散,避免了載荷突變對系統造成的損傷風險。
5.4 阻抗參數對緩沖性能的影響分析
阻抗控制參數的選擇直接影響系統的緩沖性能,通過參數敏感性分析,探究了阻抗參數對緩沖性能的影響規律,為參數整定提供理論指導。
剛度系數Ks的影響分析:保持其他參數不變,改變剛度系數KsKs的仿真結果表明,隨著Ks值的增加,機體過載峰值線性增大,但機體位置誤差相應減小。這一現象反映了剛度系數的基本物理意義——系統剛度越大,對外部位置擾動的抵抗能力越強,但產生的反作用力也越大。在著陸緩沖場景中,需要在降低沖擊載荷和保持機身穩定之間尋找平衡點。過低的剛度雖然能減少沖擊,但可能導致機身過度下沉,增加機載設備觸地風險;過高的剛度則會使系統接近剛性接觸,失去緩沖效果。基于仿真結果,建議將剛度系數設置在使系統處于臨界阻尼或過阻尼狀態的范圍內,兼顧沖擊吸收和姿態穩定。
阻尼系數Kd的影響分析:仿真分析發現,阻尼系數Kd的變化基本不影響機體位置的穩態誤差,但顯著影響系統的動態響應過程。減小Kd值可以降低機身過載峰值,但會增加超調量和減緩響應速度;增大Kd值則能抑制振蕩,減少超調量,但會使系統達到穩態的時間延長。這一特性反映了阻尼系數在能量耗散中的作用——適當阻尼可以快速消耗沖擊能量,但過大阻尼會阻礙系統的必要運動。針對著陸緩沖應用,建議采用時變阻尼策略:接觸初期采用較小阻尼,允許系統快速調整姿態;接觸穩定后增加阻尼,提高系統抗擾動能力。
參數整定策略:基于仿真分析結果,提出了一套系統的阻抗參數整定方法。首先根據飛行器質量、著陸速度和地面剛度估計,計算理論最優參數;然后通過離線仿真進行初步驗證和調整;最后在實際系統中實施在線自適應調整,根據實時傳感器反饋微調參數。這種分層整定策略既保證了參數的物理合理性,又適應了實際環境的動態變化。
第六章整機著陸緩沖性能綜合評估
6.1 高度差地形著陸分析
為評估仿生腿式起落架在真實復雜地形下的著陸性能,首先模擬了高度差地形條件下的著陸過程。設置地形高度差H=200 mm,這是實際復雜環境中常見的典型地形特征。飛行器整機質量為40 kg,下沉速度為2 m/s。
結果顯示,在200 mm高度差地形條件下,采用主動柔順控制的仿生腿式起落架表現出卓越的著陸緩沖性能。機體過載峰值穩定在2g左右,與水平地面著陸工況基本保持一致,表明系統具有良好的地形自適應能力。沖擊能量被四條著陸腿協同吸收和分配,避免了因地形不平導致的沖擊集中現象。
進一步分析著陸過程中的腿間協調機制發現,系統通過實時調整各腿的阻抗參數,實現了沖擊載荷的均衡分配。首先觸地的腿部(接觸較高地形)采用較低剛度和阻尼,增強柔順性,吸收初始沖擊;隨后觸地的腿部(接觸較低地形)則適當增加剛度,提供穩定支撐。這種動態阻抗調節策略確保了四條腿在不同時間、不同高度接觸地面時,能夠協同工作,共同維持機身穩定。
能量吸收分析表明,在200 mm高度差地形下,系統能夠吸收約85%的初始動能,其余部分通過機身的小幅運動緩慢耗散。這種能量分配特性避免了沖擊能量的突然釋放,減少了機體振動和設備損傷風險。與固定式起落架相比,仿生腿式起落架在同等條件下的沖擊載荷降低了約75%,顯著提高了著陸安全性。
6.2 斜坡地形著陸分析
斜坡地形是多旋翼飛行器在野外作業中經常遇到的挑戰性環境。模擬了坡角α=15°的斜坡地形著陸過程,評估了仿生腿式起落架在傾斜面上的著陸穩定性和緩沖性能。
結果表明,在15°斜坡地形上,主動柔順控制策略能夠有效應對重力分力引起的滑移趨勢。機身姿態調整過程顯示,系統在觸地后的0.5秒內即可將滾轉角穩定在1°以內,俯仰角穩定在2°以內,達到了操作安全的姿態要求。這一快速穩定能力源于阻抗控制的自適應特性——系統根據各腿接觸力的差異,實時調整腿部姿態,使機身重心投影保持在支撐多邊形內,確保靜態穩定。
力分布特性分析揭示了斜坡著陸過程中的載荷分配規律。位于斜坡下方的腿部承受較大垂直載荷(約占總載荷的60%),但同時提供主要的抗滑移摩擦力;位于斜坡上方的腿部雖然垂直載荷較小,但在防止機身傾覆方面發揮關鍵作用。主動柔順控制系統通過調節各腿的剛度和阻尼,優化了這種力分布,既保證了足夠的抗滑移能力,又避免了局部過載。
與水平地面著陸相比,斜坡地形下的沖擊吸收效率略有下降(約80% vs 85%),但仍遠高于傳統起落架的被動緩沖能力(通常低于50%)。這種性能下降主要源于斜坡地形導致的初始接觸不同步和重力分力的持續作用。盡管如此,仿生腿式起落架在15°斜坡上的綜合著陸性能仍然滿足安全要求,過載峰值控制在2.5g以內,姿態穩定時間小于1秒,證明了其在傾斜地形下的實用價值。
6.3 側向著陸速度影響分析
實際作業中,多旋翼飛行器常常需要在有風或緊急情況下進行帶有側向速度的著陸。為評估系統在此類非理想著陸條件下的性能,模擬了不同側向著陸速度(0.5、1.0、1.5、2.0 m/s)的著陸過程,重點分析了側向沖擊吸收和姿態恢復能力。
結果表明,主動柔順控制策略能有效處理側向著陸速度帶來的挑戰。在四個不同側向著陸速度條件下,機體側向過載峰值均穩定在4g左右,不隨側向速度線性增加。這一特性表明系統具有良好的側向沖擊吸收能力,能夠將側向動能有效轉化為腿部勢能和熱能,避免直接傳遞至機身。
姿態恢復過程分析顯示,隨著側向著陸速度的增加,機身滾轉角偏差相應增大,但主動柔順控制能夠快速抑制這種偏差增長。在2.0 m/s側向速度下,最大滾轉角偏差為8°,但系統在1.2秒內即可將偏差收斂到1°以內。這種快速姿態恢復能力源于阻抗控制的自穩定特性——系統通過調節各腿的接觸力分布,產生恢復力矩,抵消側向沖擊引起的姿態擾動。
能量流分析揭示了側向沖擊吸收的物理機制。約60%的側向初始動能通過足端與地面的摩擦耗散,25%轉化為腿部關節的勢能存儲,15%轉化為機身的旋轉動能。這種能量分配模式既有效降低了沖擊載荷,又避免了過度滑動導致的失控風險。特別值得注意的是,系統能夠在吸收側向沖擊的同時,保持足夠的垂直支撐力,防止因側向運動導致的支撐失穩。
6.4 足端接觸動力學與摩擦力分析
足端與地面之間的接觸特性是影響著陸緩沖性能的關鍵因素。詳細分析了足端觸地后的動力學行為,特別關注了摩擦力的作用機制和影響因素。
接觸力演化過程中,足端觸地后經歷了三個階段:初始接觸階段(0-50 ms)、力增長階段(50-200 ms)和穩定階段(200 ms后)。在初始接觸階段,足端與地面發生碰撞,產生瞬態沖擊力;在力增長階段,系統通過阻抗控制調節接觸力,實現柔順緩沖;在穩定階段,接觸力達到穩態值,支撐機身重量。主動柔順控制通過預測接觸過程,提前調整關節力矩,平滑了接觸力變化,減少了瞬態沖擊。
摩擦力特性研究揭示了靜摩擦向動摩擦轉變的臨界條件。足端滑動主要發生在側向著陸速度大于1.0 m/s的條件下,此時切向力超過最大靜摩擦力,系統進入滑動摩擦狀態。主動柔順控制通過調整垂直載荷和足端姿態,優化了摩擦力的利用效率——在需要抗滑移時提高垂直載荷,增強靜摩擦;在需要耗散能量時允許可控滑動,利用動摩擦耗能。
地面適應性分析評估了系統對不同地面材料的適應能力。涵蓋了從剛性表面(混凝土)到柔性表面(草地)的不同地面條件。得出主動柔順控制能夠根據接觸剛度反饋,自動調整阻抗參數,在不同地面上保持一致的緩沖性能。在剛性地面上,系統增加阻尼系數,提高能量耗散速率;在柔性地面上,系統降低剛度系數,減少地面變形引起的反作用力。這種自適應性顯著擴展了系統的適用環境范圍,提高了實際應用中的可靠性。
第七章 結論與展望
7.1 主要研究成果總結
針對低空多旋翼飛行器在復雜環境下的安全著陸問題,從仿生結構與主動控制兩個維度開展深入研究,取得了一系列創新性成果:
首先,基于蝗蟲后腿的生物力學原理,成功設計了一種驅動緩沖一體化的四足仿生腿式起落架。該起落架構型通過多自由度關節設計,實現了210 mm高度差與16°坡角的地形適應能力,顯著擴展了多旋翼飛行器的作業范圍。輕量化與集成化設計使起落架系統重量不超過飛行器最大起飛重量的20%,在保證性能的同時最大限度地減少了對飛行器續航和載荷能力的影響。
其次,建立了完整的起落架系統動力學模型,包括單腿運動學、整機著陸動力學和地面接觸動力學。模型通過實驗驗證,能夠準確預測著陸過程中的動態響應,為控制算法設計和性能評估提供了可靠工具。實驗樣機的成功搭建和測試,進一步驗證了結構設計的合理性和模型的準確性,為后續技術轉化奠定了基礎。
第三,提出了基于阻抗控制的主動柔順控制策略,實現了關節剛度與阻尼的主動調節。該策略無需依賴傳統的彈簧、阻尼器等被動元件,通過傳感器獲取關節運動信息,結合控制算法實現關節力矩的實時調整,使起落架具備可調柔順性與緩沖能力。仿真與實驗結果表明,該控制策略能夠有效降低著陸沖擊,將機體過載峰值降低70-82.4%,關節峰值扭矩降低58.6-78.5%。
最后,通過多工況系統仿真,全面評估了仿生腿式起落架在不同復雜環境下的著陸性能。在200 mm高度差地形和15°斜坡地形下,系統能夠保持一致的緩沖性能,機體過載峰值穩定在2g左右;在伴隨側向速度的著陸工況下,系統有效吸收側向沖擊能量,使機身姿態快速恢復平穩。這些性能指標充分證明了所提方案在實際應用中的可行性和優越性。
7.2 技術優勢與應用前景
與傳統起落架方案相比,提出的驅動緩沖一體化仿生腿式起落架具有多方面技術優勢:
適應性優勢:能夠適應高度差200 mm、坡度16°以內的復雜地形,顯著擴展了多旋翼飛行器的作業環境范圍。傳統固定式起落架通常要求平坦地面,而仿生腿式起落架可以應對野外、山地、城市復雜環境等多種非結構化地形。
緩沖性能優勢:主動柔順控制使系統能夠根據著陸條件動態調整緩沖特性,實現最優沖擊吸收。與傳統被動緩沖相比,峰值載荷降低70%以上,有效保護了機身結構和機載設備。
能量效率優勢:驅動緩沖一體化設計減少了額外緩沖元件的重量和能量損耗,提高了系統整體效率。集中式驅動布局降低了運動慣量,減少了控制能耗。
安全可靠性優勢:冗余設計和容錯控制提高了系統可靠性,即使在單腿故障情況下仍能保持基本著陸能力。實時狀態監測和故障診斷功能進一步增強了系統安全性。
基于這些技術優勢,仿生腿式起落架在多個領域具有廣闊應用前景:
應急救援領域:在地震、洪水等災害現場,地形往往遭到破壞,傳統無人機難以安全起降。仿生腿式起落架能夠適應崎嶇地形,實現救援物資投送、傷員搜尋等關鍵任務。
農業植保領域:農田環境存在田埂、溝渠、坡地等不規則地形,傳統無人機起降困難。自適應起落架使無人機能夠在田間任意位置起降,提高作業效率和安全性。
電力巡檢領域:高壓輸電線路多經過山區、林地等復雜地形,巡檢無人機需要在不平整地面緊急降落。仿生腿式起落架提供了可靠的應急著陸能力,保障設備和人員安全。
城市物流領域:城市環境中的無人機起降點有限且不規則(如陽臺、屋頂),傳統起落架適應性不足。自適應起落架使無人機能夠在更多地點精確著陸,拓展了物流配送網絡。
7.3 未來研究方向展望
盡管取得了階段性成果,但仿生腿式起落架技術仍面臨多方面挑戰,需要在以下方向繼續深入研究:
智能化感知與決策:現有系統主要依賴預設控制策略,對環境的感知和理解能力有限。未來應集成視覺、激光雷達等多模態傳感器,實現地形特征的實時識別和分類,基于環境信息智能調整控制策略。深度學習等人工智能技術的引入,可以進一步提高系統對復雜地形的理解能力和決策水平。
能量回收與利用:著陸緩沖過程消耗大量能量,目前主要通過阻尼耗散。未來可研究能量回收技術,將沖擊動能轉化為電能存儲,提高系統能量效率。壓電材料、電磁阻尼等新型能量回收機制值得探索,可能為無人機續航能力的提升提供新途徑。
多功能集成設計:當前起落架主要功能限于著陸緩沖,未來可向多功能集成方向發展。例如,集成抓取機構使無人機能夠棲息于樹枝、欄桿等結構;集成行走機構實現地面移動能力,拓展無人機的應用模式;集成傳感器平臺,在著陸狀態下持續執行監測任務。
群體協同著陸:隨著無人機集群技術的發展,多機協同著陸成為新的研究方向。未來應研究群體著陸的協調控制方法,避免著陸過程中的相互干擾,優化群體著陸的時空布局,提高集群作業的整體效率和安全性。
標準化與模塊化:為推動技術的廣泛應用,需要建立仿生腿式起落架的標準化體系,包括接口標準、性能測試標準和安全認證標準。模塊化設計使系統能夠根據不同應用需求靈活配置,降低制造成本和維護難度。
人機交互與安全性:隨著無人機在人口密集區域的廣泛應用,起落架系統的安全性和人機交互友好性變得尤為重要。未來應研究起落架與周圍環境(包括人員)的安全交互機制,開發碰撞檢測與避讓功能,確保在各種意外情況下的安全響應。
綜上所述,仿生腿式起落架技術作為多旋翼飛行器在復雜環境下安全著陸的關鍵解決方案,具有重要的理論研究價值和實際應用前景。隨著低空經濟的蓬勃發展和無人機應用場景的不斷拓展,這項技術必將在未來無人機系統中發揮越來越重要的作用,為人類探索和利用低空空間提供可靠的技術支撐。
&注:此文章內使用的圖片部分來源于【牛飛航,尹喬之,魏小輝,等. 基于主動柔順控制的仿生起落架緩沖方法.航空學報】及公開網絡獲取,僅供參考使用,配圖作用于文章整體美觀度,如侵權可聯系我們刪除,如需進一步了解公司產品及商務合作,請與我們聯系!!

湖南泰德航空技術有限公司于2012年成立,多年來持續學習與創新,成長為行業內有影響力的高新技術企業。公司聚焦高品質航空航天流體控制元件及系統研發,深度布局航空航天、船舶兵器、低空經濟等高科技領域,在航空航天燃/滑油泵、閥元件、流體控制系統及航空測試設備的研發上投入大量精力持續研發,為提升公司整體競爭力提供堅實支撐。
公司總部位于長沙市雨花區同升街道匯金路877號,株洲市天元區動力谷作為現代化生產基地,構建起集研發、生產、檢測、測試于一體的全鏈條產業體系。經過十余年穩步發展,成功實現從貿易和航空非標測試設備研制邁向航空航天發動機、無人機、靶機、eVTOL等飛行器燃油、潤滑、冷卻系統的創新研發轉型,不斷提升技術實力。
公司已通過 GB/T 19001-2016/ISO 9001:2015質量管理體系認證,以嚴苛標準保障產品質量。公司注重知識產權的保護和利用,積極申請發明專利、實用新型專利和軟著,目前累計獲得的知識產權已經有10多項。湖南泰德航空以客戶需求為導向,積極拓展核心業務,與國內頂尖科研單位達成深度戰略合作,整合優勢資源,攻克多項技術難題,為進一步的發展奠定堅實基礎。
湖南泰德航空始終堅持創新,建立健全供應鏈和銷售服務體系、堅持質量管理的目標,不斷提高自身核心競爭優勢,為客戶提供更經濟、更高效的飛行器動力、潤滑、冷卻系統、測試系統等解決方案。
-
飛行器
+關注
關注
13文章
831瀏覽量
47681 -
無人機
+關注
關注
236文章
11298瀏覽量
195622 -
仿生
+關注
關注
1文章
36瀏覽量
8593
發布評論請先 登錄
保載時滯與能量衰減:艦載機起落架雙氣腔緩沖器突伸性能的臨界加載因素研究

多物理場耦合動力學:機電液耦合下無人機起落架伺服系統解耦控制與動態響應優化研究

一種磁流變與油氣復合兩級緩沖系統在直升機自適應起落架中的協同設計與落震性能研究



基于落震實驗臺的磁流變起落架著陸沖擊動力學與載荷減緩效能綜合評估研究

新能源無人機風光一體化巡檢系統應用的可行性

無人機智能巡檢系統重塑煤礦安全監測新范式
起落架收放試驗臺:起落架疲勞測試背后的材料科學與精密控制

索尼FCB-CR8530一體化機芯在無人機光電吊艙中的關鍵作用
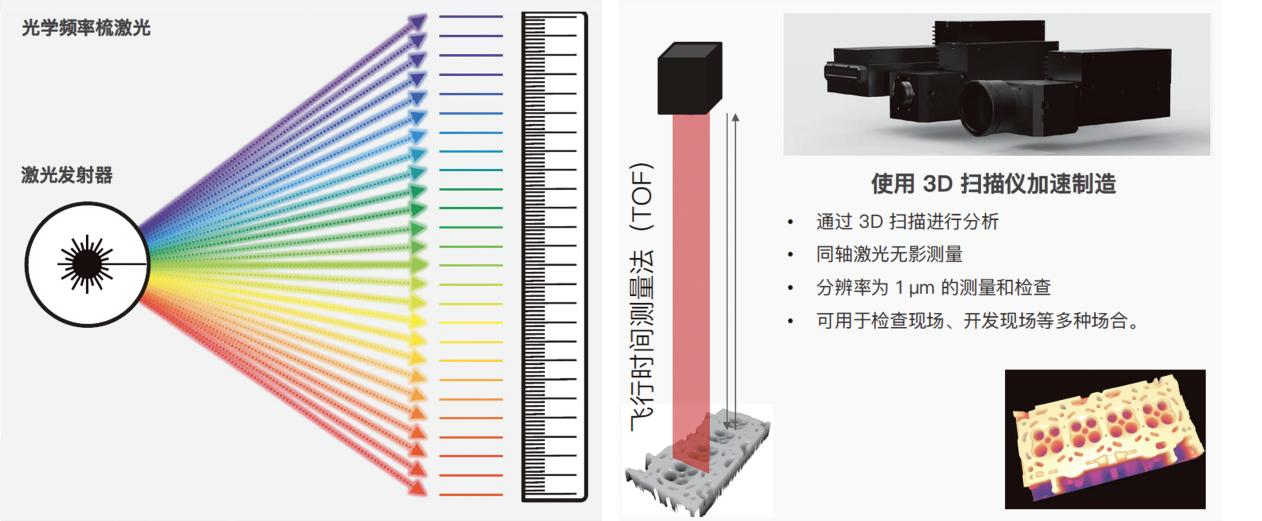
起落架深孔型腔內輪廓的檢測探究 - 激光頻率梳 3D 輪廓檢測
愛普生M-G370PDF復雜地形下無人機飛行的卓越應用

為什么新能源電站要用無人機風光一體化巡檢系統?




 工商網監
工商網監
評論