 蔚來世界模型NWM全新版本使用指南
蔚來世界模型NWM全新版本使用指南

今天,「蔚來世界模型 NWM」全新版本正式開啟推送。首批超過46萬輛「Banyan 榕」車型將陸續收到推送。「Cedar 雪松」和「Cedar S 雪松」車型,也將于近期推送。此次,蔚來率先將「世界模型+閉環強化學習」研發范式應用于智能輔助駕駛研發,將城區與高速領航輔助全面模型化,在選道、博弈、控車等基礎行車體驗層面有了大幅提升。
但也因為研發范式的迭代,用戶朋友們在使用「蔚來世界模型 NWM」全新版本時,會發現有一些功能或體驗與過去發生了變化。因此,我們特意準備了「蔚來世界模型 NWM」全新版本使用指南,以問答的方式來幫助用戶朋友們盡快上手全新版本。
能不能用最精煉的話告訴我們
這次智能輔助駕駛到底升級了什么?
本次「蔚來世界模型 NWM」全新版本,我們在智能輔助駕駛多個場景均有技術能力與用戶體驗的全面升級,內容非常豐富,這里給大家提煉一下重點:
城區領航輔助:選道準、博弈強、控車穩的行車新體驗,新增智能控速,新增人機共駕;
高速領航輔助:全面模型化,變道、上下匝道更靈活,施工改道應對能力提升;
車位收藏:支持非固定車位、無劃線車位收藏,支持預約遙控泊車,學習過程交互更清晰;
城區領航換電:新增全國2,000+座二代及以上城區換電站領航換電;
隨心智行:在地下停車場支持有標識及指向信息地點的探索,可支持組合指令、控車指令;
主動安全:「通用障礙物預警及輔助 GOA」、「自動緊急避讓 AES」性能提升;
智能泊車輔助:泊車性能提升,車輛近距召喚啟動速度優化;
超感視界:新增ETC車道識別熱力圖。
選道準、博弈強、控車穩的行車體驗,體現在哪些方面?
本次全新版本,重點解決了領航輔助中最核心的問題,執行準確度大幅提升,體感舒適,大路更從容舒適,小路精準應對,高速輕松自由,模型化控車更擬人。
選道準:
路口選道準確,高速/城市快速路上下匝道與城區領航輔助銜接準確,換道果斷不偏航;
左右轉、上下匝道合理選擇車道,不遲疑;
掉頭場景響應能力增強,可掉頭場景豐富;
無效換道減少。
博弈強:
「禮貌」加塞意圖積極;
無保護左右轉能力提升,尤其是有盲區路口,車輛會控速緩行再平穩提速;
保持小路優異表現,人車混行既文明禮貌又通行效率高。
控車穩:
橫縱一體平穩絲滑控車;
舒適減減速:加速平穩、減速舒緩、過彎順滑,起步無推背感,行駛頓挫少;
博弈過程中縱向控速、橫向控車更平穩,變道、加塞、繞行、超車都安心;
少重剎、少猛打;
智能車速調節,隨車流自動浮動;
人機共駕絲滑不割裂,人車合一。
相比上個版本,
這次我使用領航輔助會更安心嗎?
是的,此次全新版本著重解決了用戶高頻的問題場景。比如城區的偏航、壓實線換道現象大幅減少,路口通行的猶豫感顯著減弱,對臨停車、慢行車的繞行能力大幅提升。高速應對施工場景能力更強,高速誤殺車的現象也大大減少。總而言之,無論是城區領航輔助還是高速領航輔助,日常使用的踏實感、安心感、可用度會大幅提升,相信可以讓用戶朋友們更加愿意使用領航輔助。
高速領航輔助模型化之后,
會不會出現部分體驗回退的情況?
高速領航輔助從傳統規則系統切換至模型化系統,如何用模型的靈活性去提升高速領航輔助體驗的上限,但又要不能讓模型的「黑盒子」屬性拉低高速領航輔助體驗的下限,是整個行業都需要重點攻克的難題。此次「蔚來世界模型 NWM」全新版本高速領航輔助全面模型化,歷經長里程驗證,基本可以做到無「陣痛期」,確保高速行駛穩定性的同時,對換道、施工、改道場景處理更好,高速ETC通行的體驗也進一步提升,同時優化誤剎這一痛點。
這次新增的「人機共駕」,
可以幫我做哪些事?
如果在城區領航輔助狀態下,你在某些場景希望對方向進行干預,比如換一條車道或者改變當前車輛的行駛軌跡,那么只需要轉動方向盤,系統就會實時跟隨干預的方向推演合理的行駛軌跡,并調整速度予以匹配。如果系統識別到這次的意圖是換道,還會主動打轉向燈。停止控制方向盤后,系統會立即銜接控制車輛。無論是介入「人機共駕」,還是人機共駕重新切換回城區領航輔助狀態,都不會有明顯的斷點,方向盤的阻尼也不會產生較勁的感覺,整個過程基本無感,大家更新后可以親自上手感受一下。
需要注意的是,目前版本里「人機共駕」僅適用于城區領航輔助,高速領航輔助暫不支持。我們已經在進行高速領航輔助下「人機共駕」的測試與評估,后續版本會上線。
我在家或者小區沒有固定的車位,過去用點到點全域領航輔助并不方便,這次有什么優化嗎?
此次全新升級的點到點全域領航輔助,就可以解決這一類用戶的問題了。
首先,我們新增支持非固定車位類型的收藏。那么當車輛達到收藏位置前的一段距離,它就會沿途尋找合適的車位并泊入,特別適合沒有固定車位但有相對固定停車區域的場景。
其次,我們新增支持無劃線車位的收藏。在觸發了路線學習后,只需要在空地掛P擋,或者采用拖框隨心停,都可以收藏停下的位置。
然后,我們新增支持預約遙控泊車。在點到點全域領航輔助進入園區或者停車場后,直至泊車前,都可以點擊預約遙控泊車按鈕,在達到車位后下車,自動切換到遙控泊入。
最后,整個路線學習過程的交互,在新版本里也變得更加清晰易懂,收藏的車位也可以和目的地關聯,下次導航更加便捷。如果是「家」或者「公司」,無需發起導航就可以進行路線學習。
不過,目前從城區領航輔助接入點到點收藏車位的路線時,如果在過閘機前有長距離的園區道路,園區內的行車表現會進入增強車道居中輔助的狀態。特別是在園區路線較長且沒有導航的情況下,可能會出現降速、偏航的表現。這是我們后續版本要重點解決的高優先級問題,會將園區行駛能力增強并接入全域領航輔助的功能范疇,屆時園區表現有會有顯著提升。
我發現這個版本更新后,在高速和城區領航輔助時都不能手動調節跟車距離了,這是為什么?
在此次全新版本中,我們實現了所有行車功能的模型架構統一,包括跟車距離在內的行車執行動作,均由模型根據實時環境智能決策,自適應控制車距,而不再依賴預設的跟車距離擋位。因此,此次我們下線了手動調節跟車距離的功能。
可能會有用戶朋友覺得,這樣會不會不再是自己可控的車距狀態。出于安全安心的考慮,目前的智能跟車距離會略大一些,在安全邊際上適當留一些余量,確保整體體驗的安心感。當然可能也有用戶朋友覺得跟車距離太大,不符合自己的駕駛習慣,我們會在后續版本中不斷通過強化學習優化不同場景的跟車距離,更加精細化的滿足用戶朋友們的需求。如果遇到異常的車距控制距離,也歡迎大家通過一鍵上報反饋,幫助我們持續優化。
在使用領航輔助的過程中,還有哪些需要格外注意的事項嗎?
盡管此次全新版本在基礎行車體驗上有大幅提升,但由于是「世界模型+閉環強化學習」研發范式下的首個版本,還有很多需要打磨和優化的場景,在使用時也請各位用戶朋友們格外注意。
在特殊道路上,如可變車道、潮汐車道、BRT車道等,或者一些極度復雜的路口、環島等,我們目前版本的表現還不夠完美,用戶朋友們在遇到這些道路時,請格外注意,隨時做好干預的準備。接下來我們會通過更大規模數據的訓練,進一步提升在這些復雜長尾場景中的表現。
由于這個版本具備了「效率換道」的全新能力,會跟隨車流隨時尋找最高效的車道,因此在變道時可能會出現先探一探再變道的情況,也難免會出現少量不必要的換道行為。在后續版本中,效率換道的能力會隨著訓練數據量和跟深入的強化學習不斷迭代,讓換道更加合理和智能。
此次我們取消了「橫向丟失」狀態,如果沒有打開「人機共駕」或者在高速路段,通過轉動方向盤干預時,領航輔助將完全退出至人駕狀態,不保留ACC縱向控制,也不會再自動恢復至領航輔助狀態。這主要是出于安全的考慮,以及隨著技術架構進步必要的改變。
大家使用過程中,可能會出現打轉向燈晚,甚至偶爾會出現不打燈、亂打燈的情況。這是因為目前轉向燈的控制,仍然是基于模型軌跡預測輸出打燈信號,相比模型的執行動作會稍有延遲,這也是行車模型化后全行業都在面臨的問題。我們也已經啟動了轉向燈預測的模型化方案研發,打轉向燈的準確性會有明顯提升,預計將在后續版本中上線。
最關鍵的,還是要提醒大家:目前所有的智能輔助駕駛都只是輔助駕駛,不能完全替代駕駛員的操控,也不能完全應對所有情形。大家還是要時刻保持必要的注意義務,適時予以干預,安全永遠是第一位的。
使用城區領航換電時如果遇到換電排隊怎么辦?原先的高速領航換電會有變化嗎?
此次版本更新,我們上線了城區領航換電功能,支持全國超過2,000座二代及以上城區換電站。只要在換電站搜索列表中標注「領航換電」標簽的站點,都可以支持這一功能。
換電下單后,如果我們已經在城市道路上激活了領航輔助,那么就會自動銜接領航換電進入園區。如果是手動駕駛接近換電園區,同樣可以用開啟領航輔助的方式激活領航換電進入園區。
如果換電無需排隊,那么車輛就會領航前往換電區域,并銜接換電泊車流程開始換電。如果需要排隊,車輛會領航前往換電站旁的等待區域臨停,叫號后再前往換電區域。如果換電路線上等待區域都被占用,車輛就會在等待區域的盡頭尋找合適的車位先行停下,叫號后再繼續領航前往換電區域。
換電結束后,可直接在換電站內發起導航,一鍵啟動領航駛出園區并銜接城區領航輔助。如果換電站是途經點,那可直接在換電后一鍵啟動領航。
這次城區領航換電,我們采用的是新技術方案,和原先高速領航換電的技術方案完全不同。出于資源投入優先級的考慮,我們首先在使用頻次更高的城區換電上落地了新方案。高速領航換電的技術方案,也會在后續版本更新上進行切換,在此之前我們會陸續下線基于原先技術方案的高速領航換電。
「停車場自主尋路」升級為「隨心智行」,是不是意味著能找的東西更多了?
在「蔚來世界模型 NWM」的首個版本中,我們推出了「停車場自主尋路」功能,可以在沒有導航信息、沒有先驗地圖、沒有學習記憶的前提下,在地下停車場內通過語音指令尋找出口和樓棟號。這是對模型能力上限的一次探索。在此次全新版本中,這一功能升級為「隨心智行」,可以認知地下停車場內更多的場景,新增了控車指令,還能理解更復雜的組合指令,并且可以實現邊漫游、邊響應指令的隨心探索體驗。
這次我們可以尋找有標識且有指向信息的場景,比如某某大樓、某某超市、某某酒店、某某電梯廳、充電車位等,還可以識別停車樓層。
可以支持組合語音指令,比如“Hi NOMI,領航先去18號樓,再幫我找個車位停下”,系統就會先尋找到18號樓,然后附近尋找空車位泊入。
可以實現語音控車,比如“Hi NOMI,前方路口左轉”,“Hi NOMI,前面靠邊停一下”。
探索過程中取消隨心智行,“Hi NOMI,取消隨心智行”,系統會進入漫游狀態。同時也可以在地下停車場內,通過方向盤左側中間按鍵激活功能,在下達指令前同樣是漫游狀態。
需要注意的是,目前「隨心智行」功能僅支持地下停車場內使用,還不具備通過閘機的能力,也無法與城區領航輔助銜接。同時,大家進入某些停車場時,會發現中控屏地圖會進入「停車場導航」的界面,并引導你前往停車場內電梯廳或其它商家信息。但「停車場導航」僅為人駕提供必要的導航信息參考,與智能輔助駕駛沒有任何關系,不管是以點到點全域領航輔助的方式進入停車場,還是在停車場內進行隨心智行探索,都是基于「蔚來世界模型 NWM」的認知與推理能力,沒有任何導航信息的參與。
-
模型
+關注
關注
1文章
3751瀏覽量
52099 -
輔助駕駛
+關注
關注
1文章
416瀏覽量
15807 -
蔚來
+關注
關注
1文章
585瀏覽量
15225
原文標題:「蔚來世界模型 NWM」全新版本使用指南
文章出處:【微信號:NIO-Wechat,微信公眾號:蔚來】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
蔚來世界模型NWM全新版本正式推送
如何使用新版本J-Flash編程CW32 MCU
【直播預告】RT-Trace 全新版本發布|ITM輸出 MemoryWatch 功能首發實測! | 問學直播

戴爾數據保護軟件迎來全新版本
全新AMD Vitis統一軟件平臺2025.1版本發布
軟件更新 | 從數據到模型,全面升級!TSMaster新版助力汽車研發新突破

NVIDIA GTC巴黎亮點:全新Cosmos Predict-2世界基礎模型與CARLA集成加速智能汽車訓練
蔚來世界模型NWM首個版本正式推送
普華基礎軟件開源汽車操作系統新版本代碼上線
普華基礎軟件開源車用操作系統迎來全新版本
網絡傳輸利器索尼NXL-ME80 V1.2新版本發布
SOA架構開發小助手PAVELINK.SOA-Converter 2.1.2新版本發布

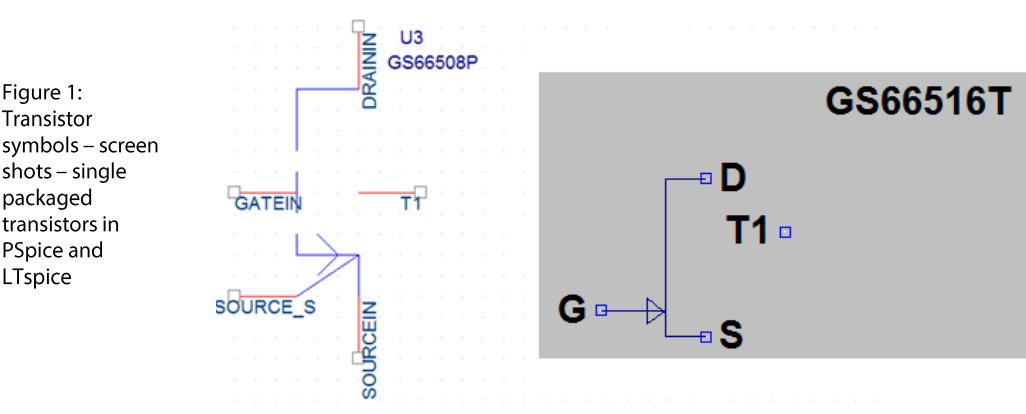
GaN HEMT的SPICE模型使用指南及示例



 工商網監
工商網監
評論