 機器人通信協議EtherCAT和CAN如何選擇
機器人通信協議EtherCAT和CAN如何選擇

以下文章來源于機器人開發圈,作者付斌
當下,雖然行業中存在許多通信協議,但業內人士普遍認為,EtherCAT和CAN兩大協議,是機器人行業未來最重要的兩大協議。
越來越被重視的EtherCAT
據EtherCAT技術組織(ETG)2024年統計,EtherCAT已占據全球工業機器人通信協議市場39.2%的份額,年增長率達12.7%,表現遠超其他同類協議。在關鍵應用場景中,EtherCAT的優勢尤為明顯:無論是人形機器人的多關節實時協同控制、自動駕駛的多傳感器融合,還是工業4.0中的人機協作,它都在重新定義智能體與物理世界交互的方式。
EtherCAT是機器人關節主流通訊方式之一,在工業機器人、人形機器人關節控制中廣泛應用。比如說,庫卡、發那科等主流機器人廠商廣泛采用EtherCAT作為控制總線,以實現焊接、搬運、噴涂等復雜作業。
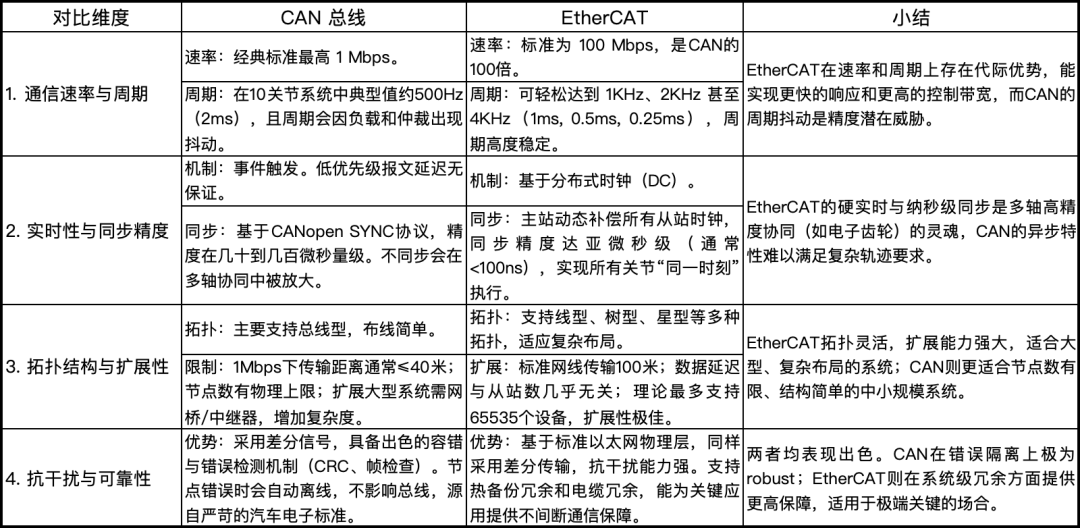
EtherCAT適用于對實時性要求高的場景:機器人關節的電流環、速度環、位置環三環控制,需快速完成“信號采集-運算處理-輸出”閉環流程。
支持機器人全身統一通訊架構,部分場景也會與CAN搭配,如機器人上半身走EtherCAT,下半身走CAN。
EtherCAT(Ethernet for Control Automation Technology)總線由德國倍福自動化有限公司在2003年首次提出,它是一種基于以太網的現場總線技術。誕生之初,工業界急需一種高速、高效且低成本的通信解決方案,EtherCAT應運而生,憑借其突破傳統以太網在工業自動化應用局限的特點,迅速獲得關注。它的最大特點是數據傳輸速度極快,能夠實現納秒級的同步精度。
EtherCAT僅使用了物理層、鏈路層、應用層三層協議,與多數傳統的現場總線相同,但相比于其它實時以太網協議,如PROFINET、EtherNet/IP等,其協議棧更加精簡。因此它具備超高速的數據傳輸能力,能夠在極短時間內完成大量數據的交換,滿足機器人實時控制需求,使機器人可以快速響應指令,實現高精度的運動控制。其分布式時鐘技術可確保網絡中所有設備的時鐘精確同步,讓機器人各關節動作協調一致,避免因時間偏差導致的運動誤差。
On-the-Fly/Processing on the Fly?(飛行處理)是EtherCAT技術的護城河。有工程師表示,這個特性目前只在EtherCAT上見到了,而且不基于IP協議。該機制是其高性能的核心設計,允許從站在不存儲完整報文的情況下,直接讀取或寫入數據實現微秒級實時通信。
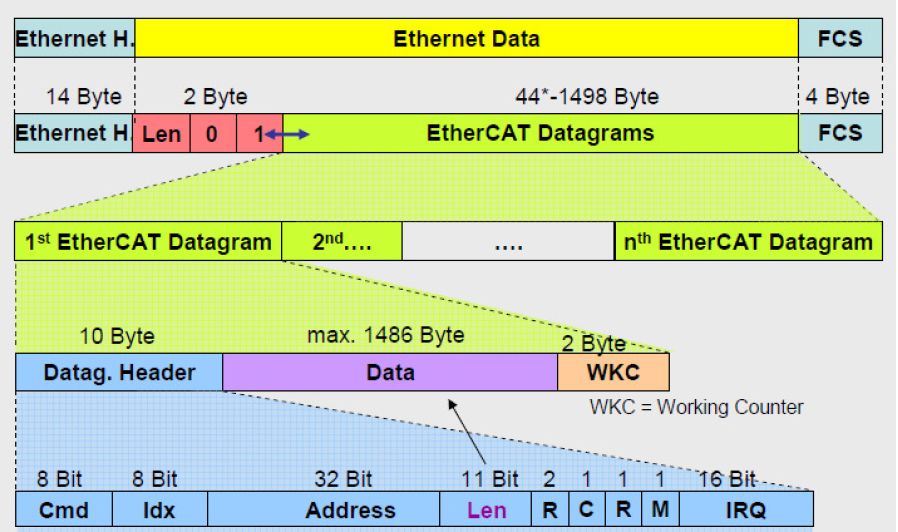
與傳統以太網協議不同,數據幀無需存儲轉發,從站設備在數據經過時直接讀取或寫入數據段,單幀處理延遲僅為1μs。技術實現主要包括:
分布式時鐘同步:基于主從站時鐘偏移補償算法,實現全網絡節點時間同步誤差低于100 ns(遵循IEEE 1588增強標準);
數據幀結構優化:采用8字節緊湊型幀頭,數據負載率可達98%(高于PROFINET的60%),顯著提升帶寬利用率。
從性能和安全的角度,EtherCAT很強,但占據主導的另一個主要原因在于開放。
從工程師角度來看,EtherCAT使用起來可能不如CAN友好,不過對運動控制,有要求的場景,EtherCAT協議最有性價比。
目前,MCU廠商對于EtherCAT的重視程度非常高。
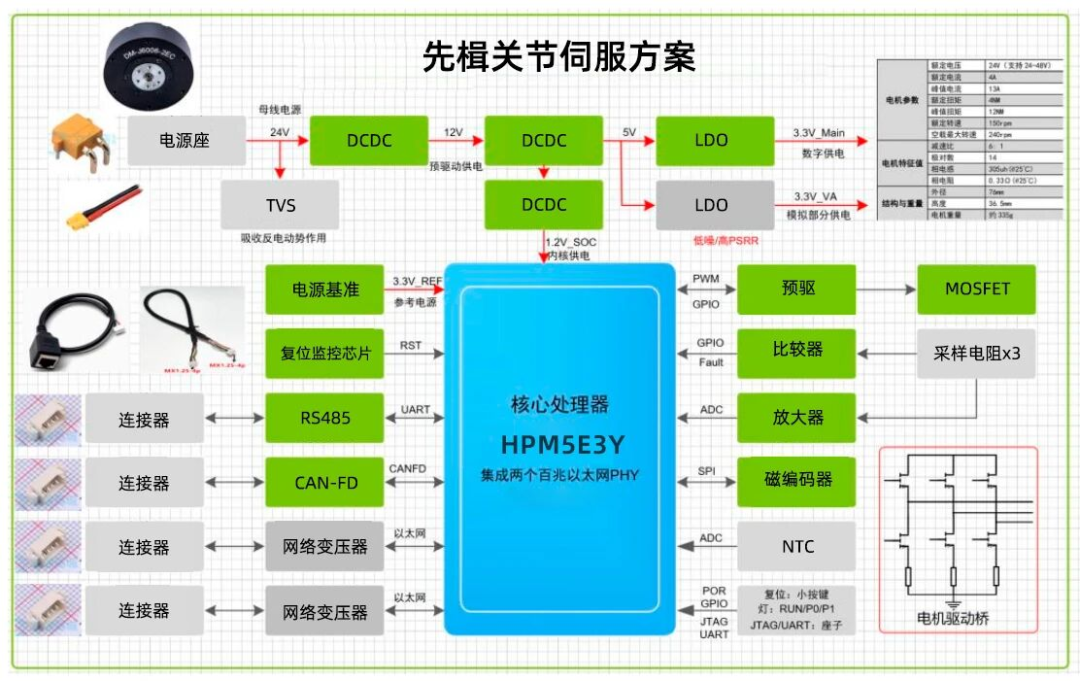
早在2023年12月,先楫就對外宣布,推出中國首款擁有德國倍福公司(Beckhoff)正式授權EtherCAT從站控制器(ESC, EtherCAT Slave Controller)的高性能MCU產品HPM6E00系列。而后針對機器人推出HPM6E8Y。在CES 2026上,先楫又發布機器人關節專用的高性能MCU HPM5E3Y,內置EtherCAT從站控制器和2個以太網PHY收發器,RISV-V內核主頻達480MHz,內置512KB RAM和1MB Flash閃存,同時體積非常小,最小封裝只有9×9毫米,非常匹配機器人關節空間有限、設計緊湊的要求。HPM5E3Y與HPM6E8Y兼容互補,構建全球最完整的機器人關節MCU系列。

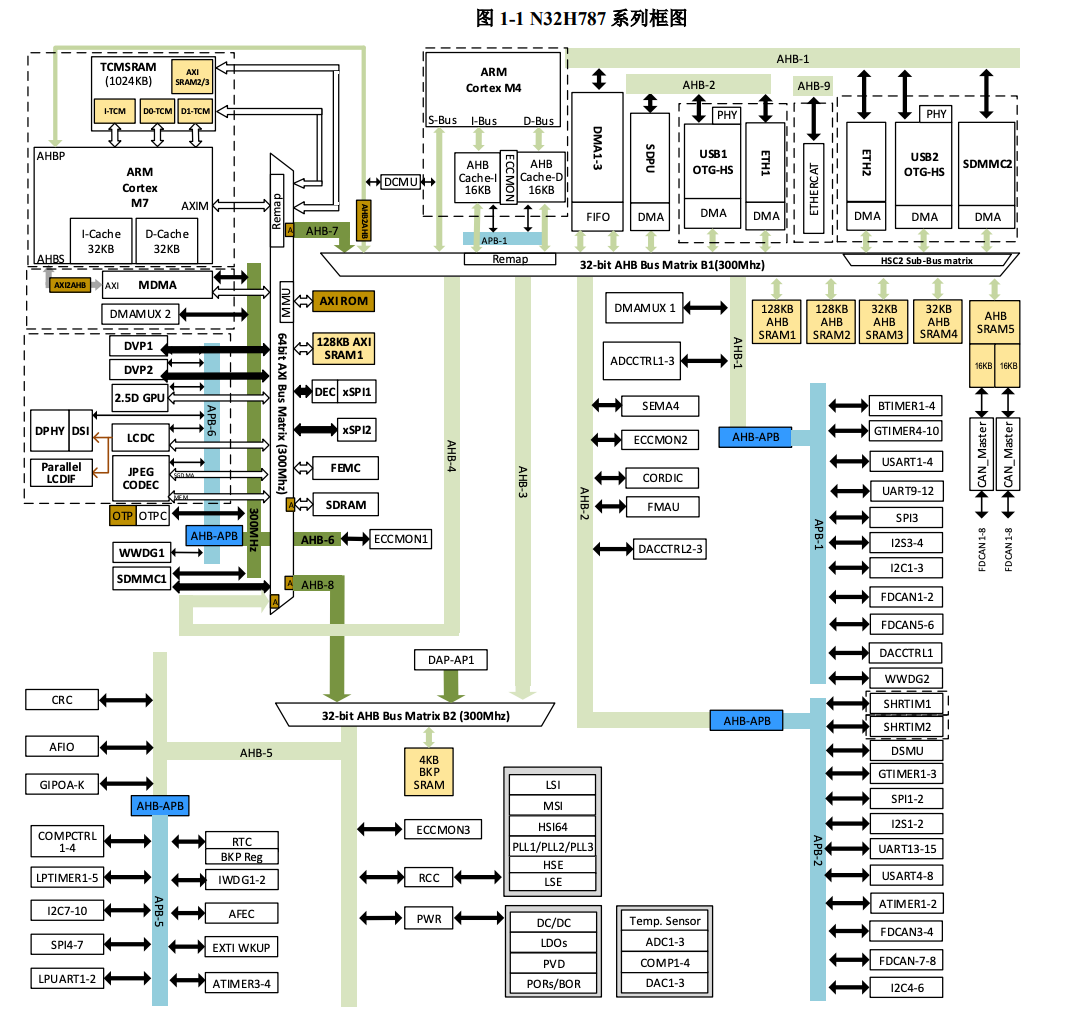
國民技術非常關注EtherCAT在機器人上的趨勢。2025年慕尼黑期間,國民技術發布國內首款M7+M4雙核異構的N32H785、N32GH785EC、N32H787、N32H788四大系列高性能MCU,以及M7內核的N32H760、N32H762、N32H765、N32H765EC四大系列高性能MCU,其中N32H788EC與N32H765EC系列集成EtherCAT從站控制器,是國內首個晶圓級集成倍福官方授權EtherCAT從站控制器。
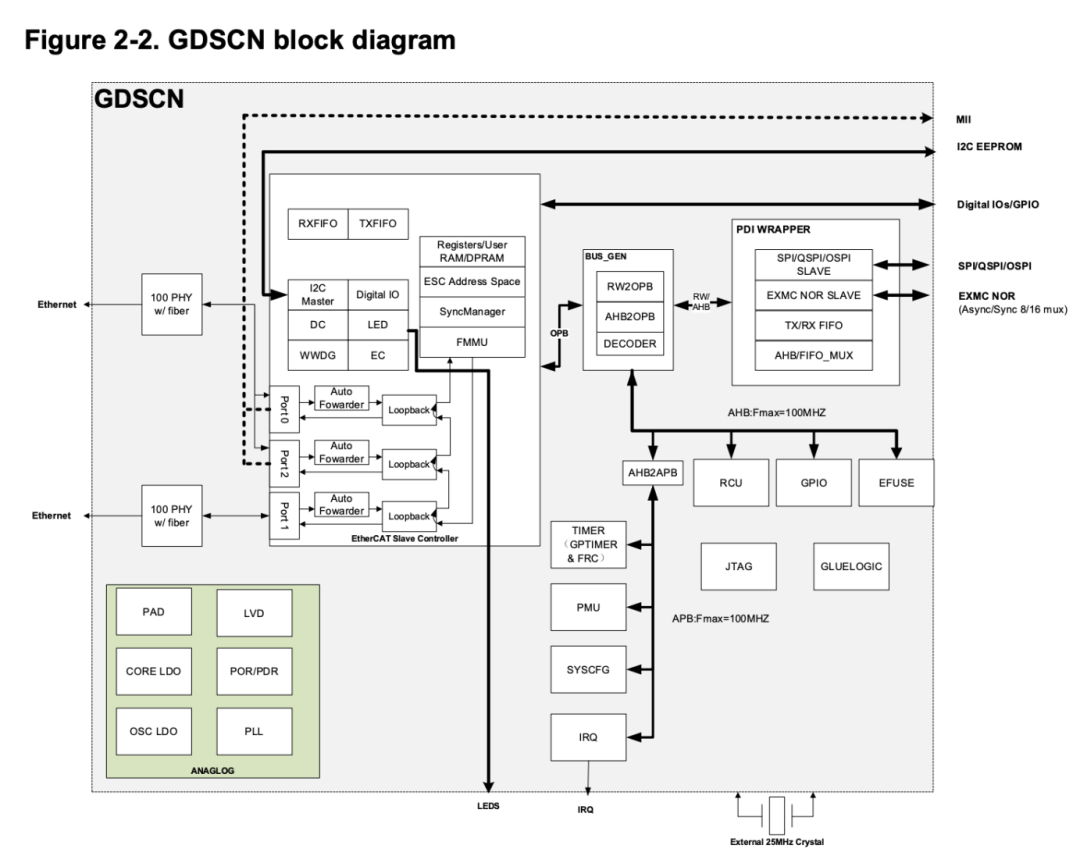
兆易創新也非常關注EtherCAT在機器人上的趨勢。2025年9月,兆易創新推出兩款芯片——GDSCN832系列EtherCAT從站控制器產品以及GD32H75E系列超高性能工業互聯MCU產品。EtherCAT從站控制芯片GDSCN832集成2個內部PHY和1個MII擴展接口,內置雙通道集成Ethernet物理層設備,每個通道均提供全雙工100BASE-TX收發器,支持100Mbps運行。GD32H75E集成了EtherCAT IP,使其內置ESC子系統以及一系列高性能外設資源,如3x CAN-FD、2x USB、高性能數字濾波器HPDF、EDOUT、14bit ADC、12bit DAC、比較器等。

CAN也是繞不開的大山
CAN(以及其更適用于運動控制的變種CANopen)是機器人另一主流通訊方案,尤其適用于對實時性要求稍低的場景,如機器人下半身、輪式機器人驅動。
隨著EtherCAT成本下降,CAN的應用場景有所壓縮,但在關節數量少、控制頻率低的機器人如四足機器人、機器狗中仍廣泛使用;同時,CAN在人形機器人中仍然不可或缺,比如智元靈犀X1采用100Mbps EtherCAT 1KHZ實時通信轉發、EtherCAT轉3路CANFD數據域(波特率達5Mbps)。
CAN支持多網段劃分。如果機器人全身若有40多個關節,可按肢體(胳膊、腿)分成多個CAN FD網段,避免總線仲裁導致的延遲與丟包。
CAN總線最初為汽車電子設計,核心設計強調可靠性與抗干擾能力。其采用“載波監聽多路訪問/非破壞性仲裁”(CSMA/CA)機制,允許多個節點在總線空閑時主動發送數據。若發生沖突,優先級高的報文(ID值較小)可繼續傳輸,優先級低的則自動延遲發送,實現無數據損毀的仲裁。
這一機制支持分布式決策,具備高可靠性,適用于傳遞開關量、傳感器數據等非周期性信息,因此在汽車電子控制單元(ECU)間通信中應用廣泛。然而,當CAN總線應用于對實時性與周期性要求極高的多軸協同運動控制場景時,其固有局限便顯現出來。
從CAN和EtherCAT選擇上看,CAN多在已有CAN總線架構的系統中進行擴展,對于軸數較少(如6軸以下)、同步與動態性能要求不極致的桌面機器人、AGV等,CAN足夠且經濟,同時在極端環境下具有公認的魯棒性。而EtherCAT則適合在高性能或者大規模分布式的機器人系統,雖然單節點成本可能較高,但其在簡化布線、免中繼設備、便于調試維護以及性能提升等方面的綜合價值,往往使長期成本更具優勢。
I3C這一協議也在發展
I3C是新興的傳感器通訊協議,國外大廠正推動其在機器人靈巧手領域的應用,可省去外部PHY,簡化硬件設計。比如,NXP的i.MX RT1180集成2個I3C接口,可連接多個伺服節點與傳感器;英飛凌的PSOC Edge支持I3C;瑞薩最新推出的RA8系列高性能MCU中,也均支持了I3C總線;Microchip的PIC18-Q20系列配備了通信速率快的I3C模塊;ST的STM32N6、STM32H5、STM32H7、STM32U3均支持I3C。
I3C適配靈巧手多電機控制、高密度傳感器數據采集(如電子皮膚、力矩傳感器),適合傳感器數量多、安裝空間受限的場景(如機器人手指)。
目前機器人靈巧手主流仍采用CAN FD,I3C因生態成熟度不足,尚未大規模落地。此外,有工程師認為I3C的方案在抗干擾能力上較差,所以很難在靈巧手上實現規模化落地。
不過,當前技術扔在不斷發展和進化之中。一些國產芯片正在講將I3C納入研發范疇,未來將根據市場需求推進量產,同時關注CAN XL等新型協議的發展。屆時,整個市場將會進一步發生變化。
-
機器人
+關注
關注
213文章
31246瀏覽量
223093 -
通信協議
+關注
關注
28文章
1093瀏覽量
42287 -
CAN
+關注
關注
59文章
3079瀏覽量
473106 -
ethercat
+關注
關注
20文章
1529瀏覽量
45668
原文標題:機器人通信協議,為什么EtherCAT和CAN才是未來?
文章出處:【微信號:gkongbbs,微信公眾號:工控論壇】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
EtherCAT主站協議棧EC-Master在ROS(機器人操作系統)中的應用

EtherCAT?技術前瞻:人形機器人通信的新選擇!
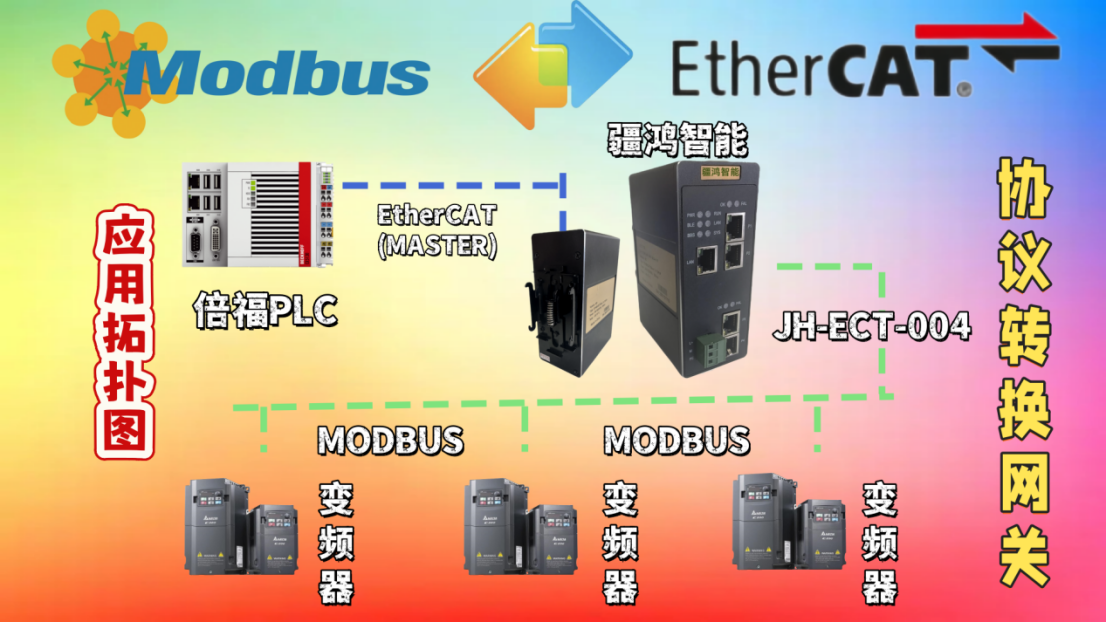
集成異構網絡:EtherCAT轉MODBUS機器人通信方案
讓老舊醫療設備“聽懂”新語言:CAN轉EtherCAT的醫療行業應用
讓太陽能逆變器“狂飆”的秘訣-耐達訊CAN轉EtherCAT網關
破界而立:CAN轉EtherCAT在VAV系統的融合實踐
條碼信號“搭子”來了:CAN轉EtherCAT掃碼連動器,靠譜!
耐達訊CAN轉EtherCAT網關,變頻器通信升級的“真香”指南
打破協議壁壘,CAN轉EtherCAT連接工業相機秒變跨國CP”!
讓電磁閥“聽懂”EtherCAT:耐達訊CAN轉EtherCAT網關
倉庫機器人效率翻倍的秘密:CAN主站+Modbus TCP的網關神操作
工業通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機器人的“紅線”
跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信

當PLC遇上電焊機器人:EtherCAT轉CANopen上演工業級“語言翻譯官”
通信新思路:EtherCAT轉Profinet網關在自主研發機器人中的技術實踐與優化




 工商網監
工商網監
評論