 瑞芯微(EASY EAI)RV1126B 車輛檢測
瑞芯微(EASY EAI)RV1126B 車輛檢測

1. 車輛檢測簡介
車輛檢測是一種基于深度學習的對人進行檢測定位的目標檢測,能廣泛的用于園區管理、交通分析等多種場景,是違停識別、堵車識別、車流統計等多種算法的基石算法。
本車輛檢測算法在數據集表現如下所示:

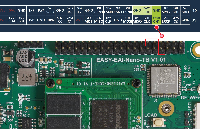
基于EASY-EAI-Nano-TB硬件主板的運行效率:

2. 快速上手
2.1 開發環境準備
如果您初次閱讀此文檔,請閱讀《入門指南/開發環境準備/Easy-Eai編譯環境準備與更新》,并按照其相關的操作,進行編譯環境的部署。
在PC端Ubuntu系統中執行run腳本,進入EASY-EAI編譯環境,具體如下所示。
cd ~/develop_environment
./run.sh 
2.2 源碼下載
在EASY-EAI編譯環境下創建存放源碼倉庫的管理目錄:
cd /opt
mkdir EASY-EAI-Toolkit
cd EASY-EAI-Toolkit通過git工具,在管理目錄內克隆遠程倉庫
git clone https://github.com/EASY-EAI/EASY-EAI-Toolkit-1126B.git
注:
* 此處可能會因網絡原因造成卡頓,請耐心等待。
* 如果實在要在gitHub網頁上下載,也要把整個倉庫下載下來,不能單獨下載本實例對應的目錄。
2.3 模型部署
要完成算法Demo的執行,需要先下載車輛檢測算法模型。
百度網盤鏈接為:https://pan.baidu.com/s/11t903AfO1M3AfPsw7uRriw?pwd=1234 (提取碼:1234 )。

同時需要把下載的車輛檢測算法模型復制粘貼到Release/目錄:
2.4 例程編譯
進入到對應的例程目錄執行編譯操作,具體命令如下所示:
cd EASY-EAI-Toolkit-1126B/Demos/algorithm-car/
./build.sh cpres注:
* 由于依賴庫部署在板卡上,因此交叉編譯過程中必須保持/mnt掛載。
* 若build.sh腳本帶有cpres參數,則會把Release/目錄下的所有資源都拷貝到開發板上。
2.5 例程運行及效果
通過串口調試或ssh調試,進入板卡后臺,定位到例程部署的位置,如下所示:
cd /userdata/Demo/algorithm-car/
運行例程命令如下所示:
sudo ./test-car_detect car_detect.model test.jpg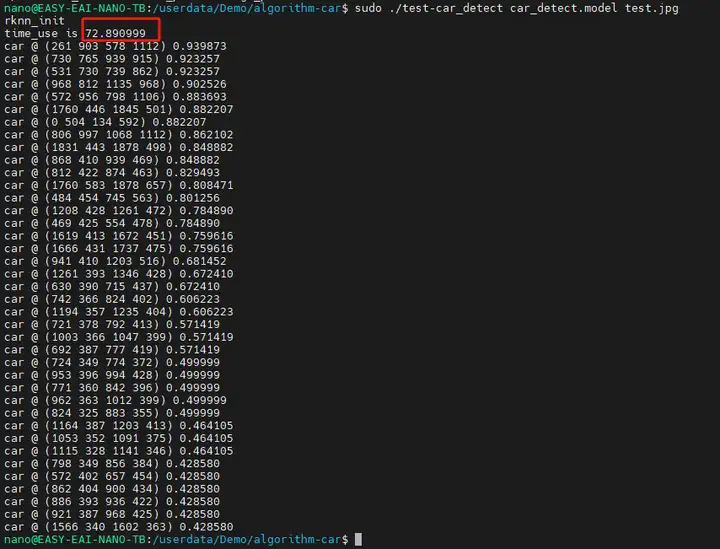
在EASY-EAI編譯環境可以取回測試圖片:
cp /mnt/userdata/Demo/algorithm-car/result.jpg .
結果圖片如下所示:

API的詳細說明,以及API的調用(本例程源碼),詳細信息見下方說明。
3. 車輛檢測API說明
3.1 引用方式
為方便客戶在本地工程中直接調用我們的EASY EAI api庫,此處列出工程中需要鏈接的庫以及頭文件等,方便用戶直接添加。

3.2 車輛檢測初始化函數
車輛檢測初始化函數原型如下所示。
int car_detect_init(rknn_context *ctx, const char * path)具體介紹如下所示。

3.3 車輛檢測運行函數
車輛檢測運行函數car_detect_run原型如下所示。
int car_detect_run(rknn_context ctx, cv::Mat input_image, person_detect_result_group_t *detect_result_group)具體介紹如下所示。

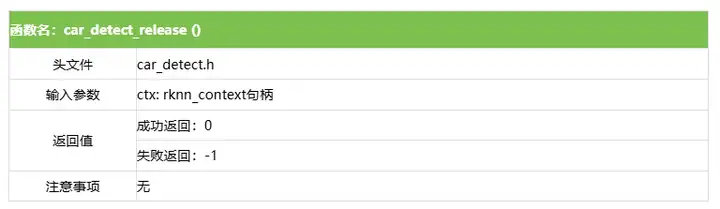
3.4 車輛檢測釋放函數
車輛檢測釋放函數原型如下所示。
int car_detect_release(rknn_context ctx)具體介紹如下所示。
4. 車輛檢測算法例程
例程目錄為Demos/algorithm-car/test-car_detect.cpp,操作流程如下。
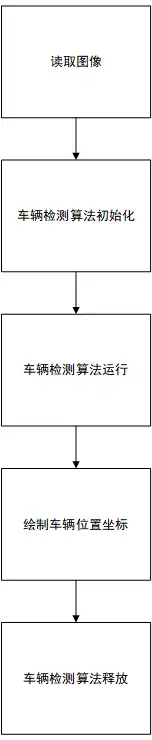
參考例程如下所示。
#include
#include
#include
#include "car_detect.h"
using namespace cv;
using namespace std;
static Scalar colorArray[10]={
Scalar(255, 0, 0, 255),
Scalar(0, 255, 0, 255),
Scalar(0,0,139,255),
Scalar(0,100,0,255),
Scalar(139,139,0,255),
Scalar(209,206,0,255),
Scalar(0,127,255,255),
Scalar(139,61,72,255),
Scalar(0,255,0,255),
Scalar(255,0,0,255),
};
int plot_one_box(Mat src, int x1, int x2, int y1, int y2, char *label, char colour)
{
int tl = round(0.002 * (src.rows + src.cols) / 2) + 1;
rectangle(src, cv::Point(x1, y1), cv::Point(x2, y2), colorArray[(unsigned char)colour], 3);
int tf = max(tl -1, 1);
int base_line = 0;
cv::Size t_size = getTextSize(label, FONT_HERSHEY_SIMPLEX, (float)tl/3, tf, &base_line);
int x3 = x1 + t_size.width;
int y3 = y1 - t_size.height - 3;
rectangle(src, cv::Point(x1, y1), cv::Point(x3, y3), colorArray[(unsigned char)colour], -1);
putText(src, label, cv::Point(x1, y1 - 2), FONT_HERSHEY_SIMPLEX, (float)tl/3, cv::Scalar(255, 255, 255, 255), tf, 8);
return 0;
}
int main(int argc, char **argv)
{
if (argc != 3)
{
printf("%s \n", argv[0]);
return -1;
}
const char *model_path = argv[1];
const char *image_path = argv[2];
/* 參數初始化 */
detect_result_group_t detect_result_group;
/* 算法模型初始化 */
rknn_context ctx;
car_detect_init(&ctx, model_path);
/* 算法運行 */
cv::Mat src;
src = cv::imread(image_path, 1);
struct timeval start;
struct timeval end;
float time_use=0;
gettimeofday(&start,NULL);
car_detect_run(ctx, src, &detect_result_group);
gettimeofday(&end,NULL);
time_use=(end.tv_sec-start.tv_sec)*1000000+(end.tv_usec-start.tv_usec);//微秒
printf("time_use is %f\n",time_use/1000/10);
/* 算法結果在圖像中畫出并保存 */
// Draw Objects
char text[256];
for (int i = 0; i < detect_result_group.count; i++)
{
detect_result_t* det_result = &(detect_result_group.results[i]);
if( det_result->prop < 0.4)
{
continue;
}
sprintf(text, "%s %.1f%%", det_result->name, det_result->prop * 100);
printf("%s @ (%d %d %d %d) %f\n", det_result->name, det_result->box.left, det_result->box.top,
det_result->box.right, det_result->box.bottom, det_result->prop);
int x1 = det_result->box.left;
int y1 = det_result->box.top;
int x2 = det_result->box.right;
int y2 = det_result->box.bottom;
/*
rectangle(src, cv::Point(x1, y1), cv::Point(x2, y2), cv::Scalar(255, 0, 0, 255), 3);
putText(src, text, cv::Point(x1, y1 + 12), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
*/
plot_one_box(src, x1, x2, y1, y2, text, i%10);
}
cv::imwrite("result.jpg", src);
/* 算法模型空間釋放 */
car_detect_release(ctx);
return 0;
}-
Linux
+關注
關注
88文章
11800瀏覽量
219424 -
瑞芯微
+關注
關注
27文章
824瀏覽量
54623 -
EASY-EAI靈眸科技
+關注
關注
4文章
84瀏覽量
3710 -
RV1126B
+關注
關注
0文章
72瀏覽量
229
發布評論請先 登錄
瑞芯微(EASY EAI)RV1126B 音頻輸入

瑞芯微(EASY EAI)RV1126B PWM使用
瑞芯微(EASY EAI)RV1126B 音頻輸出

瑞芯微(EASY EAI)RV1126B BSD(車輛盲區檢測)

【EASY EAI Nano-TB(RV1126B)開發板試用】+初識篇
【EASY EAI Nano-TB(RV1126B)開發板試用】命令行功能測試-shell腳本進行IO控制-燈閃
【EASY EAI Nano-TB(RV1126B)開發板試用】命令行功能測試-shell腳本進行IO控制-紅綠燈項目
【EASY EAI Nano-TB(RV1126B)開發板試用】命令行功能測試-shell腳本進行IO控制-紅綠燈按鈕項目
【EASY EAI Nano-TB(RV1126B)開發板試用】+1、開箱上電
【EASY EAI Nano-TB(RV1126B)開發板試用】介紹、系統安裝
RV1126系列選型指南:從RV1126到RV1126B,一文看懂升級差異

【免費試用】EASY EAI Nano-TB(RV1126B)開發套件評測

瑞芯微RV1126B特性概述
替代升級實錘!實測RV1126B,CPU性能吊打RV1126

瑞芯微(EASY EAI)RV1126B 人體關鍵點識別



 工商網監
工商網監
評論