 RK平臺ROS2適配全指南:從編譯到運行,手把手搞定嵌入式機器人開發
RK平臺ROS2適配全指南:從編譯到運行,手把手搞定嵌入式機器人開發

在嵌入式機器人與智能硬件領域,瑞芯微(Rockchip)的RK356x、RK3588等arm64芯片憑借高性能、低功耗的優勢,成為眾多開發者的首選硬件平臺;而ROS2(Robot Operating System 2)作為新一代機器人操作系統,在分布式通信、實時性、多語言支持上的升級,更是嵌入式機器人開發的核心框架。
但不少開發者在將ROS2適配到RK平臺時,常會遇到“SDK與ROS2版本不兼容”“交叉編譯報錯”“板端運行缺失依賴”等問題。本文基于瑞芯微官方《Rockchip Linux SDK編譯ROS2說明》文檔,從適配邏輯、完整流程到避坑技巧,手把手教你搞定RK平臺的ROS2適配。
一、適配基礎:先搞懂“支持清單”
在開始適配前,必須先明確硬件、系統、ROS2版本的匹配關系,避免因版本不兼容走彎路。

1.1支持的硬件芯片
RK平臺目前僅支持arm64位芯片,已驗證的型號包括:
?RK356x系列(如RK3562、RK3568)
?RK3588系列
?其他同架構arm64芯片(內核版本無限制)
注意:32位arm芯片的rootfs暫未支持ROS2編譯,屬于待完善項。
1.2匹配的Linux SDK與Docker鏡像
RK Linux SDK基于Buildroot構建,ROS2的編譯依賴SDK提供的Python、bullet、opencv等基礎包,且需與Docker鏡像的Python版本嚴格一致(避免交叉編譯時庫版本沖突)。
已驗證的SDK與Docker匹配關系如下:
|
Linux SDK版本
|
Python版本
|
匹配Docker鏡像
|
額外要求
|
|
linux-5.10-stan-rkr1
|
3.10.5
|
jammy-ros2-build
|
需要添加ros2_dep.config補丁
|
|
linux-4.19-gen-rkr3
|
3.8.6
|
focal-ros2-build
|
需更新lttng-tools等依賴到指定版本
|
1.3已驗證的ROS2發行版
RK平臺已實測通過4個ROS2版本,源碼可直接從GitHub下載,版本信息如下:
|
ROS2發行版
|
版本號
|
下載鏈接(GitHub)
|
|
Foxy
|
ros2-release-foxy-20230620
|
https://github.com/ros2/ros2/releases/tag/release-foxy-20230620
|
|
Galactic
|
ros2-release-galactic-20221209
|
https://github.com/ros2/ros2/releases/tag/release-galactic-20221209
|
|
Humble
|
ros2-release-humble-20230724
|
https://github.com/ros2/ros2/releases/tag/release-humble-20230724
|
|
Iron
|
ros2-release-iron-20230912
|
https://github.com/ros2/ros2/releases/tag/release-iron-20230912
|
二、核心邏輯:為什么用“Docker+SDK”分離編譯?
很多開發者會疑惑:直接在RK SDK里編譯ROS2不行嗎?為什么要引入Docker?
這背后是RK團隊為降低維護成本、提升版本靈活性設計的適配邏輯:
2.1 ROS官方方案的痛點
ROS2官方雖提供了arm64交叉編譯的Docker鏡像(如Dockerfile_ubuntu_arm64_prebuilt),但僅支持Ubuntu 18.04(Bionic)系統,而RK Linux SDK的rootfs基于Buildroot定制,與Ubuntu 18.04的庫結構差異極大,直接使用會導致大量依賴沖突。
2.2 RK方案的優勢:解耦SDK與ROS2
RK采用“SDK提供依賴+ Docker編譯ROS2”的分離模式:
?RK Linux SDK:僅負責編譯ROS2所需的基礎依賴(如Python、Eigen、OpenCV),不直接編譯ROS2本體,避免SDK升級對ROS2的影響;
?Docker容器:提供統一的Ubuntu編譯環境,結合SDK的交叉工具鏈與Sysroot,確保ROS2編譯產物能適配RK的rootfs;
?最終通過“重新打包rootfs”將ROS2集成到RK板端,實現靈活升級(換ROS2版本只需換Docker編譯,無需重構SDK)。
三、手把手適配流程:4步從0到ROS2運行
接下來進入實操環節,全程基于“RK3562 + Linux 5.10 SDK + ROS2 Iron”示例,其他型號可參考適配。
3.1第一步:編譯RK SDK,集成ROS2依賴
先確保SDK已包含ROS2的基礎依賴,關鍵是配置ros2_dep.config文件。
步驟1.1檢查/添加ros2_dep.config
ros2_dep.config是ROS2依賴的配置文件,存放于buildroot/configs/rockchip/目錄下,包含LTTNG、Python等必需依賴的開關。
?若存在該文件:檢查是否包含LTTNG_TOOLS(ROS2 Iron必需),若缺失則手動添加:
# 編輯ros2_dep.configtail-f buildroot/configs/rockchip/ros2_dep.config# 添加以下內容(支持tracetools功能)BR2_PACKAGE_LTTNG_TOOLS=yBR2_PACKAGE_LTTNG_LIBUST=y
?若不存在該文件:需給SDK打2個補丁(補丁文件可從RK官方鏈接下載):
# 進入SDK的buildroot目錄cdbuildroot# 打補丁(添加libasio依賴和ros2_dep.config)patch -p1 < ../linux-sdk-patches/buildroot/0001-package-add-libasio.patchpatch -p1 < ../linux-sdk-patches/buildroot/0002-configs-rockchip-add-ros2-build-dependencies.patch
步驟1.2將ros2_dep.config集成到SDK編譯
修改SDK的defconfig文件(如RK356x機器人方案的rockchip_rk356x_robot_defconfig),引入ros2_dep.config:
# 編輯defconfigvim buildroot/configs/rockchip/rockchip_rk356x_robot_defconfig# 在文件中添加一行(引入ROS2依賴配置)#include "ros2_dep.config"
步驟1.3完整編譯SDK的rootfs
執行SDK編譯命令,生成包含ROS2依賴的rootfs:
# 進入SDK根目錄cd/path/to/rk-linux-sdk# 編譯rootfs(根據芯片型號選擇defconfig)./build.sh rockchip_rk356x_robot_defconfig# 編譯完成后,rootfs輸出在buildroot/output/rockchip_rk356x_robot/
3.2第二步:搭建Docker編譯環境
基于匹配的Docker鏡像,搭建ROS2的交叉編譯環境。
步驟2.1安裝Docker并配置用戶組
在Ubuntu PC(建議20.04及以上)上安裝Docker,避免每次執行需sudo:
# 安裝Dockersudoapt install docker.io# 將當前用戶加入docker組(無需sudo)sudo usermod -aG docker$USERnewgrp docker # 生效用戶組
步驟2.2導入匹配的Docker鏡像
先確認SDK編譯的Python版本,再導入對應Docker鏡像(鏡像從RK官方鏈接下載):
# 查看SDK的Python版本(示例輸出:Python 3.10.5)./buildroot/output/rockchip_rk356x_robot/host/bin/python --version# 導入匹配的鏡像(Python 3.10.5對應jammy-ros2-build)gunzip jammy-ros2-build.tar.gz # 解壓鏡像docker image load -i jammy-ros2-build.tar # 導入鏡像
步驟2.3啟動Docker容器并掛載SDK輸出目錄
啟動容器時,需將SDK的output目錄(含交叉工具鏈、rootfs)掛載到容器內,確保編譯時能調用SDK資源:
# 啟動容器,掛載SDK的output目錄(source替換為你的SDK output路徑)docker run -it --mounttype=bind,source=/home/yourname/rk-sdk/buildroot/output/rockchip_rk356x_robot/,target=/buildroot jammy-ros2-build# 進入容器后,默認用戶為builder,密碼:rockchip
步驟2.4拷貝編譯腳本與ROS2源碼到容器
從RK官方鏈接下載ros2-build-scripts.tar.gz(編譯腳本)和ros2-sources.tar.gz(ROS2源碼),拷貝到容器內并解壓:
# 1. 在Ubuntu PC端,查找容器ID(示例容器ID:c519d9d668f9)docker containerls# 2. 拷貝文件到容器的/tmp目錄docker containercpros2-build-scripts.tar.gz c519d9d668f9:/tmp/docker containercpros2-sources.tar.gz c519d9d668f9:/tmp/# 3. 在容器內解壓文件到/opt/ros目錄tar zxf /tmp/ros2-build-scripts.tar.gz -C /tar zxf /tmp/ros2-sources.tar.gz -C /# 解壓后,/opt/ros下會有cross-compile(交叉編譯配置)和各ROS2版本目錄ls/opt/ros # 輸出:cross-compile foxy galactic humble iron
步驟2.5修改腳本的Python版本號
確保編譯腳本的Python版本與SDK一致(示例SDK為3.10.5,無需修改;若為3.8.6則需將“310”改為“38”):
編輯交叉編譯配置文件vim /opt/ros/cross-compile/cross-compile.mixin檢查Python版本相關配置(如3.10對應310)示例:將所有"3.10"改為"3.8"(若SDK為Python 3.8.6)
3.3第三步:編譯ROS2,解決交叉編譯關鍵問題
進入ROS2版本目錄(如Iron),執行編譯腳本,重點處理“TRY_RUN手動配置”問題。
步驟3.1執行編譯前準備
# 進入ROS2 Iron目錄cd/opt/ros/iron# 準備源碼(腳本會檢查源碼完整性)./prepare-source.sh
步驟3.2執行編譯腳本
# 開始編譯ROS2(耗時約15-30分鐘,取決于PC性能)./build-ros2.sh# 編譯成功的標志:輸出類似以下內容Summary: 317 packages finished [15min 37s]build ros quit & cleanup
關鍵問題:處理TRY_RUN手動配置
交叉編譯時,fastrtps和rosbag2_cpp會觸發TRY_RUN報錯(因無法在PC端運行arm64程序),需手動在RK板端執行程序并記錄結果。
案例1:fastrtps的TRY_RUN報錯
報錯信息:
CMake Error: TRY_RUN() invokedincross-compiling mode, pleasesetSM_RUN_RESULTandSM_RUN_RESULT__TRYRUN_OUTPUT
解決步驟:
1.將容器內的測試程序(如/buildroot/build/ros/fastrtps/cmTC_4f573)拷貝到RK板端;
2.在RK板端執行程序,記錄輸出:
# RK板端執行/tmp/cmTC_4f573-SM_RUN_RESULT # 輸出:PTHREAD_RWLOCK_PREFER_READER_NP
1.在容器內編輯TryRunResults.cmake,填入結果:
vim/buildroot/build/ros/fastrtps/TryRunResults.cmake# 添加以下內容set(SM_RUN_RESULT"0"CACHESTRING"PTHREAD_RWLOCK_PREFER_READER_NP"FORCE)set(SM_RUN_RESULT__TRYRUN_OUTPUT"0"CACHESTRING"PTHREAD_RWLOCK_PREFER_READER_NP"FORCE)
案例2:rosbag2_cpp的TRY_RUN報錯
類似處理,在RK板端執行測試程序后,填入結果(示例輸出為缺失liblsan.so):
vim/buildroot/build/ros/rosbag2_cpp/TryRunResults.cmakeset(HAVE_SANITIZERS_EXITCODE"127"CACHESTRING"error while loading shared libraries: liblsan.so.0"FORCE)set(HAVE_SANITIZERS_EXITCODE__TRYRUN_OUTPUT"127"CACHESTRING"error while loading shared libraries: liblsan.so.0"FORCE)
可選:單獨編譯某個ROS2包
若只需編譯特定包(如demo_nodes_cpp),可使用colcon build --packages-select:
# 單獨編譯demo_nodes_cppcolconbuild --packages-selectdemo_nodes_cpp --cmake-args -DCMAKE_TOOLCHAIN_FILE=/buildroot/share/buildroot/toolchainfile.cmake
3.4第四步:打包rootfs,板端運行ROS2
編譯完成后,ROS2產物已存放在/buildroot/target/opt/ros目錄,需重新打包rootfs并燒錄到RK板端。
步驟4.1重新打包rootfs
在Ubuntu PC的SDK根目錄,執行打包命令:
# 進入SDK根目錄cd/path/to/rk-linux-sdk# 重新打包rootfs(生成rootfs.img)./build.sh rootfs
步驟4.2燒錄rootfs并運行ROS2
將rootfs.img燒錄到RK板端(使用RK燒錄工具),啟動后執行以下命令運行ROS2 Hello World:
# 進入ROS2目錄cd/opt/ros/iron# 設置環境變量(指定ROS2路徑和工作目錄)exportCOLCON_CURRENT_PREFIX=/opt/ros/ironexportROS_HOME=/userdata/source./local_setup.sh # 加載ROS2環境# 驗證ROS2環境(列出已安裝包)ros2 pkg list# 運行Hello World(啟動listener后臺進程,再啟動talker)ros2 run demo_nodes_cpp listener &ros2 run demo_nodes_cpp talker# 成功輸出(類似以下內容)[INFO] [1501839280.834017748] [talker]: Publishing:'Hello World: 1'[INFO] [1501839280.839280957] [listener]: I heard: [Hello World: 1]
四、避坑寶典:10個常見報錯的解決方案
適配過程中難免遇到編譯或運行報錯,以下是RK官方已驗證的10個高頻問題及解決方案,按報錯場景分類。
4.1編譯環境類報錯
1.編譯主機內存不足
?現象:編譯中途卡頓或報錯“out of memory”;
?解決方案:開啟zram交換空間(示例分配12G):
sudo -i sumodprobe zramecho12G > /sys/block/zram0/disksizemkswap /dev/zram0swapon /dev/zram0free -h # 驗證交換空間已生效
2. pkg-config找不到
?現象:編譯tracetools時報錯“Could NOT find PkgConfig”;
?原因:Docker中未安裝pkgconf(非pkg-config),或SDK的host-pkgconf與Docker版本沖突;
?解決方案:在Docker中安裝pkgconf,并指定SDK的pkgconfig路徑:
# Docker中安裝pkgconfsudo apt install pkgconf# 設置PKG_CONFIG_PATH(指向SDK的sysroot)exportPKG_CONFIG_PATH=/buildroot/host/aarch64-buildroot-linux-gnu/sysroot/usr/lib/pkgconfig
4.2板端運行類報錯
3.板端報“GLIBCXX_3.4.30 not found”
?現象:運行ros2命令時,提示libstdc++.so.6: version 'GLIBCXX_3.4.30' not found;
?原因:ROS2編譯使用的工具鏈與SDK的工具鏈版本不匹配;
?解決方案:必須使用RK Linux SDK自帶的交叉工具鏈編譯ROS2(Docker掛載的/buildroot目錄已包含該工具鏈)。
4.編譯結果出現x86_64動態庫
?現象:ROS2的Python庫(如_rclpy_pybind11.cpython-310-x86_64-linux-gnu.so)是x86架構,無法在arm64板端運行;
?原因:pybind11交叉編譯時默認使用PC的Python路徑;
?解決方案:修改pybind11配置,指定arm64的Python模塊后綴:
# 1. 在pybind11_vendor/CMakeLists.txt中添加list(APPEND extra_cmake_args"-DPYBIND11_PYTHONLIBS_OVERWRITE=OFF")list(APPEND extra_cmake_args"-DPYTHON_MODULE_EXTENSION=.cpython-310-aarch64-linux-gnu.so")# 2. 在cross-compile.mixin中添加相同參數
4.3依賴與配置類報錯
5. CMake找不到exlibConfig.cmake
?現象:編譯ament_cmake_vendor_package時,報錯“Could not find exlibConfig.cmake”;
?原因:交叉工具鏈路徑與CMAKE_PREFIX_PATH沖突;
?解決方案:編譯時不指定CMAKE_TOOLCHAIN_FILE(依賴Docker與SDK掛載的環境自動識別)。
6. google_benchmark缺少limits頭文件
?現象:編譯foxy版本時,報錯“‘numeric_limits’ is not a member of ‘std’”;
?原因:benchmark_register.h缺失
?解決方案:在該頭文件中添加#include
7. _FORTIFY_SOURCE編譯報錯
?現象:編譯mimick_vendor時,報錯“_FORTIFY_SOURCE requires compiling with optimization (-O)”;
?原因:SDK工具鏈定義了_FORTIFY_SOURCE,但未開啟編譯優化;
?解決方案:刪除工具鏈中的_FORTIFY_SOURCE定義,或在編譯時添加-O2優化參數。
8.需要設置CMAKE_INCLUDE_PATH
?現象:編譯orocos_kdl_vendor時,報錯“EIGEN3_INCLUDE_DIR NOTFOUND”;
?原因:CMake無法找到SDK中的Eigen頭文件;
?解決方案:指定CMAKE_INCLUDE_PATH指向SDK的sysroot:
exportCMAKE_INCLUDE_PATH='/buildroot/host/aarch64-buildroot-linux-gnu/sysroot/usr/include/'
9. tracetools找不到lttng-ust
?現象:編譯tracetools時,報錯“cannot find -llttng-ust-common”;
?原因:pkg-config找到了Docker的lttng,而非SDK的lttng;
?解決方案:設置PKG_CONFIG_PATH指向SDK的pkgconfig目錄(同問題2的解決方案)。
10.交叉編譯時numpy路徑錯誤
?現象:編譯action_msgs時,警告“unsafe header path: /usr/local/lib/python3.10/dist-packages/numpy/core/include”;
?原因:Python使用PC端的numpy路徑;
?解決方案:在cross-compile.mixin中預設numpy的include路徑(指向SDK的sysroot)。
五、待完善方向:這些功能還在優化中
目前RK平臺的ROS2適配仍有2個待完善項,開發者需注意:
1.刪除不必要的安裝文件:編譯后的ROS2目錄包含cmake、頭文件、靜態庫等冗余文件,未來可優化為僅保留運行必需的動態庫和腳本;
2.arm32位rootfs支持:當前僅支持arm64,32位芯片(如RK3288)的適配仍在開發中。
六、總結與建議
RK平臺的ROS2適配核心是“SDK提供依賴+ Docker編譯+ rootfs集成”,既解決了官方ROS2鏡像與RK系統的兼容性問題,又實現了SDK與ROS2的解耦維護。
給開發者的3點實操建議:
1.版本匹配是前提:務必確保SDK的Python版本、Docker鏡像、ROS2版本三者對應,避免版本沖突;
2.交叉編譯多檢查:編譯后通過file命令驗證產物架構(如file _rclpy_pybind11.so應顯示“aarch64”);
通過這套流程,你可以快速在RK356x、RK3588等芯片上跑通ROS2,為嵌入式機器人開發打下基礎。后續可基于此擴展激光SLAM、運動控制等功能,充分發揮RK芯片的硬件性能與ROS2的軟件生態優勢。

-
嵌入式
+關注
關注
5204文章
20560瀏覽量
335906 -
機器人
+關注
關注
213文章
31254瀏覽量
223139 -
操作系統
+關注
關注
37文章
7421瀏覽量
129504 -
瑞芯微
+關注
關注
27文章
811瀏覽量
54557
發布評論請先 登錄
RK3562 單板機嵌入式 ROS2 開發指南:環境搭建與工程編譯

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
米爾RK3576成功上車!ROS2 Humble生態系統體驗
RIO嵌入式控制平臺怎么助力機器人應用?
分享一份RK3308開發板ROS使用手冊指南
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
《嵌入式 - STM32開發指南》手把手教你搭建STM32開發環境 [Windows版 - 3]
![《<b class='flag-5'>嵌入式</b> - STM32<b class='flag-5'>開發指南</b>》<b class='flag-5'>手把手</b>教你搭建STM32<b class='flag-5'>開發</b>環境 [Windows版 - 3]](https://file.elecfans.com/web1/M00/D9/4E/pIYBAF_1ac2Ac0EEAABDkS1IP1s689.png)
《嵌入式 - STM32開發指南》手把手教你搭建STM32開發環境 [Linux版 - 3]
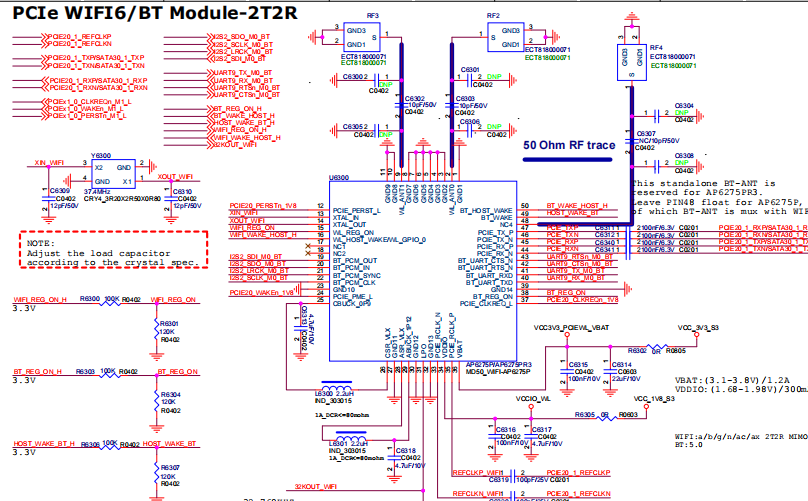
一文搞定RK平臺Wi-Fi/BT調試!從配置到問題解決全攻略
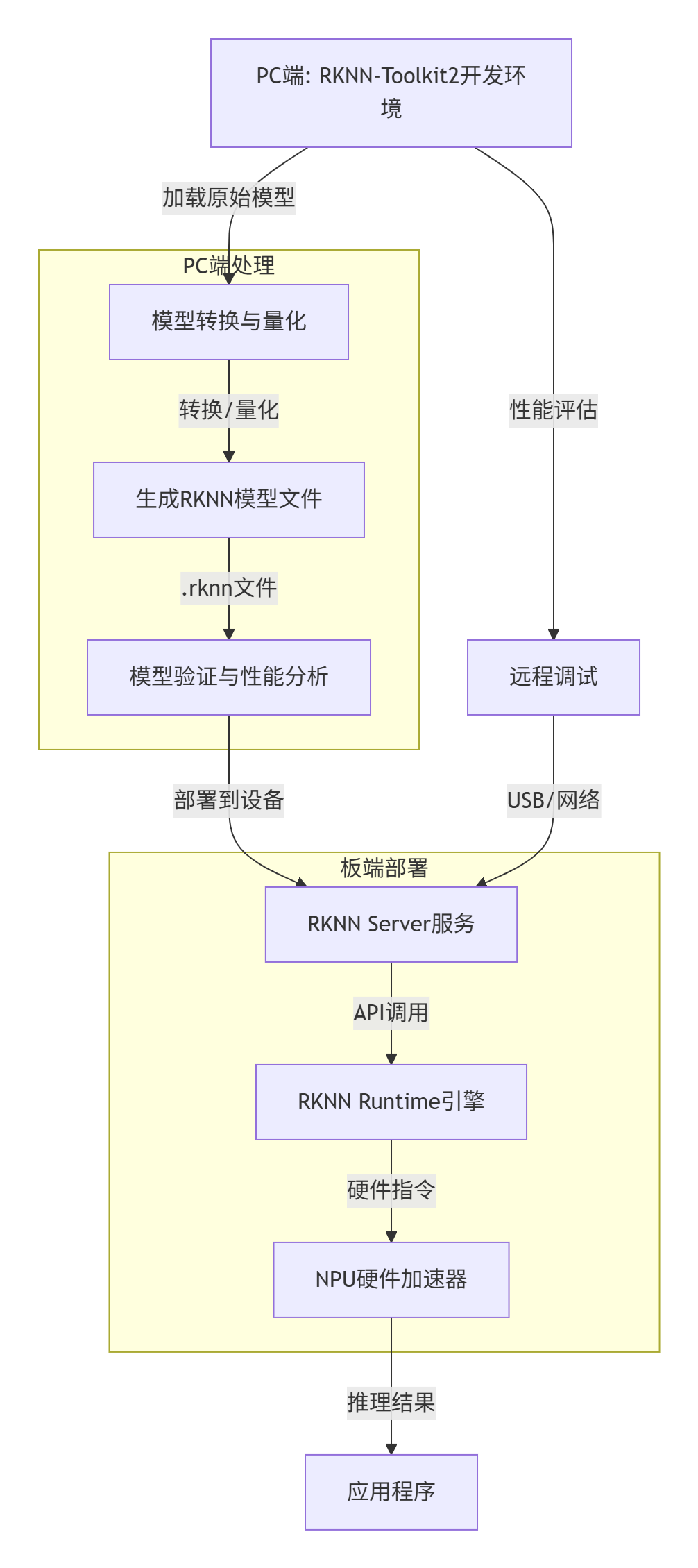
瑞芯微RKNPU開發全指南:從環境搭建到性能優化,一文搞定邊緣AI部署
開發必看,RK3576基于Ubuntu22.04安裝 測試ROS2機器人系統




 工商網監
工商網監
評論