") 中科院上海硅酸鹽所/新加坡國立大學(xué):研發(fā)多自由度高靈敏柔性壓離子傳感器
中科院上海硅酸鹽所/新加坡國立大學(xué):研發(fā)多自由度高靈敏柔性壓離子傳感器

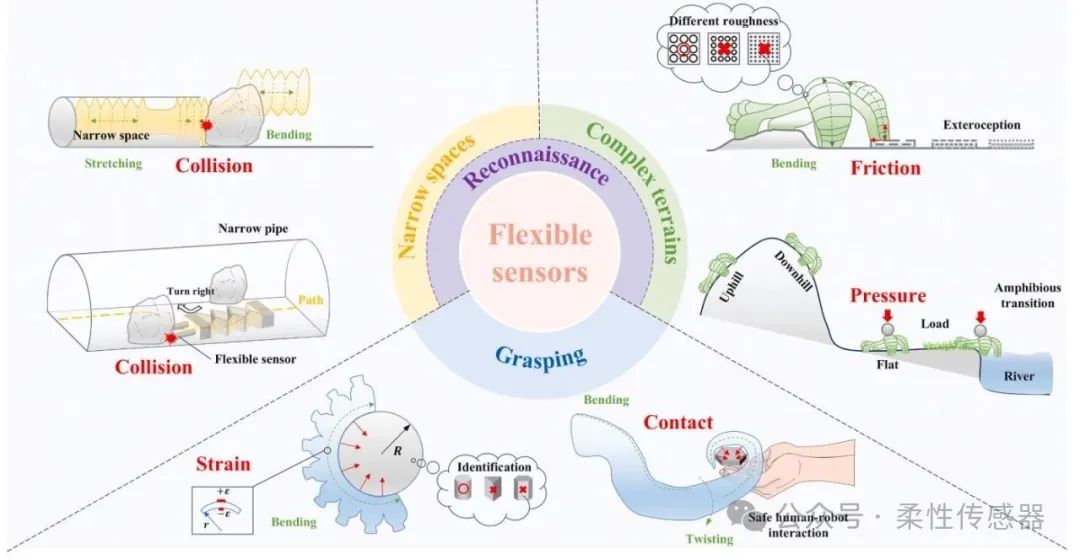
人體運(yùn)動(dòng)捕捉在生物力學(xué)評(píng)估、沉浸式VR/AR等領(lǐng)域需求迫切。傳統(tǒng)光學(xué)式與慣性式運(yùn)動(dòng)追蹤技術(shù)成本高、校準(zhǔn)復(fù)雜且長期佩戴不適。柔性彎曲傳感器作為新興解決方案,其中的電阻式、電容式與壓電式類型存在持續(xù)耗電、信號(hào)易受干擾或僅響應(yīng)動(dòng)態(tài)刺激等限制。柔性壓電離子傳感器兼具柔軟、自供能、動(dòng)靜態(tài)響應(yīng)等優(yōu)勢,卻長期受制于靈敏度低、感應(yīng)范圍窄,以及單一自由度響應(yīng)的問題,嚴(yán)重制約其在復(fù)雜人體運(yùn)動(dòng)捕捉中的實(shí)際應(yīng)用。因此,開發(fā)兼具超高靈敏度、寬檢測范圍及多自由度運(yùn)動(dòng)分辨能力的壓離子傳感器至關(guān)重要。
中科院上海硅酸鹽研究所孫靜研究員團(tuán)隊(duì)的王冉冉研究員和程蔭特聘研究員與新加坡國立大學(xué)Ho Ghim Wei教授進(jìn)行合作,通過材料與結(jié)構(gòu)的雙重設(shè)計(jì),開發(fā)出一款具備高靈敏度、可實(shí)時(shí)解析人體復(fù)雜動(dòng)作的SPIM柔性壓離子傳感器。材料上,借助離子-偶極相互作用促進(jìn)離子通道形成,空間位阻效應(yīng)放大正負(fù)離子遷移率失衡,協(xié)同實(shí)現(xiàn)3.2 mV/度的超高靈敏度;結(jié)構(gòu)上,采用四棱柱纖維搭配對(duì)稱納米網(wǎng)格電極,實(shí)現(xiàn)多彎曲自由度解耦,精準(zhǔn)識(shí)別屈伸、展收、環(huán)轉(zhuǎn)等復(fù)雜肢體動(dòng)作。該傳感器進(jìn)一步展示了手部動(dòng)作的數(shù)字孿生以及基于單關(guān)節(jié)操控的復(fù)雜VR交互,將超高靈敏度、寬角度響應(yīng)與多自由度分辨集成于緊湊可穿戴形態(tài),有望在穿戴式元宇宙界面交互領(lǐng)域獲得應(yīng)用。相關(guān)研究以“Ultrasensitive multi-degree-of-freedom piezoionic sensor via synergistic hydrogel-ion interactions”為題發(fā)表于最新一期國際期刊《Nature Communications》。論文第一作者是方悅博士、歐陽昊碩士與程蔭特聘研究員,通訊作者為程蔭特聘研究員、Ho Ghim Wei教授和王冉冉研究員。
圖文解析
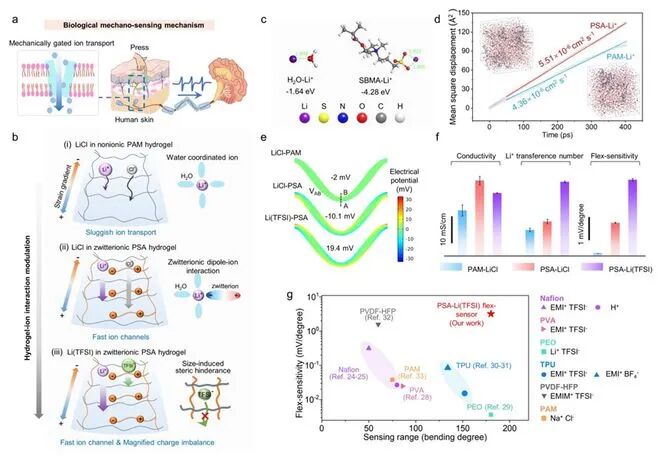
圖1. SPIM柔性傳感器的設(shè)計(jì)及超高靈敏度的機(jī)理分析
圍繞SPIM傳感器的設(shè)計(jì)邏輯與超高彎曲靈敏度機(jī)理,圖1呈現(xiàn)了從生物啟發(fā)到性能突破的路徑。圖1a描述了人體皮膚機(jī)械感受器的離子門控傳輸機(jī)制。圖1b中對(duì)比了三種水凝膠-離子組合體系,其中兩性離子水凝膠-無機(jī)鹽(PSA-LiCl)通過偶極-離子相互作用構(gòu)建獨(dú)立遷移通道提升了離子遷移效率,而兩性離子水凝膠-有機(jī)鹽(PSA-Li (TFSI))則借助聚合物-離子雙重作用實(shí)現(xiàn)了超高靈敏度。密度泛函理論計(jì)算顯示(圖1c),Li+與PSA中SBMA基團(tuán)的結(jié)合能(-4.3 eV)低于與水分子的結(jié)合能(-1.6 eV),分子動(dòng)力學(xué)模擬證實(shí)PSA水凝膠中離子擴(kuò)散系數(shù)更高(圖1d),有限元仿真呈現(xiàn)了PSA-Li (TFSI)體系更顯著的電勢差(19.4 mV)(圖1e)。圖1f性能對(duì)比表明各項(xiàng)指標(biāo)均優(yōu)于傳統(tǒng)壓離子傳感器及其他機(jī)制傳感器(圖1g)。
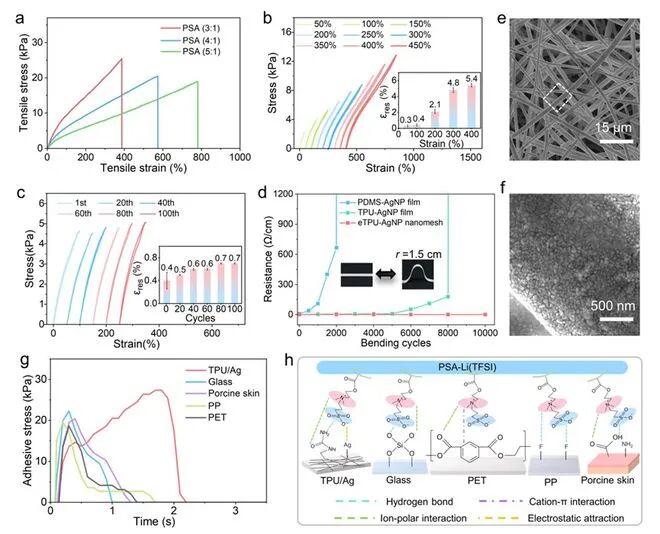
圖2.機(jī)械/電氣韌性與界面韌性
研究聚焦傳感器的結(jié)構(gòu)穩(wěn)定性與界面兼容性,通過水凝膠力學(xué)性能優(yōu)化、電極設(shè)計(jì)及界面作用分析,保障傳感器長期使用的可靠性。水凝膠力學(xué)優(yōu)化方面,PSA水凝膠楊氏模量達(dá)14 kPa(圖2a),兼具柔軟性與支撐性,在50%-450%應(yīng)變范圍內(nèi)循環(huán)拉伸后殘余應(yīng)變極小(圖2b、2c),展現(xiàn)出優(yōu)異的回彈能力。電極設(shè)計(jì)上,采用靜電紡絲結(jié)合真空蒸鍍制備的eTPU-AgNP納米網(wǎng)電極,具有優(yōu)異電機(jī)械穩(wěn)定性(圖2d)。界面粘附性方面,PSA-Li (TFSI)水凝膠與電極的粘附強(qiáng)度高達(dá)27 kPa,粘附力源于氫鍵、離子-極性相互作用、靜電引力等多重作用,確保傳感器與皮膚或器件的穩(wěn)定結(jié)合。
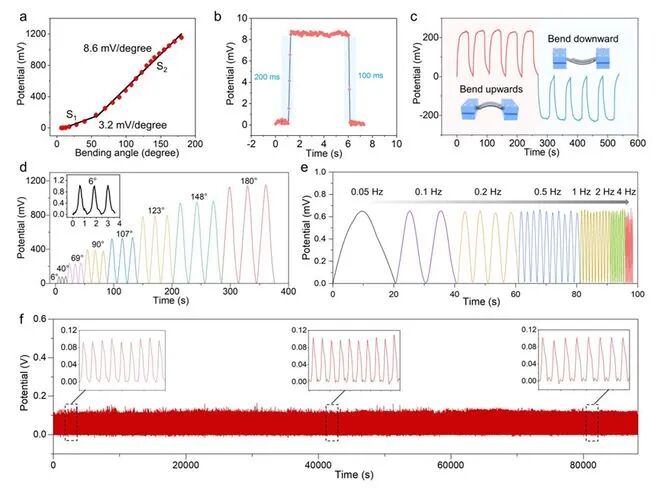
圖3. PSA-Li(TFSI)的傳感性能
圖3系統(tǒng)展示了SPIM傳感器的關(guān)鍵傳感指標(biāo)。在靈敏度與檢測范圍上(圖3a),輸出電勢隨彎曲角度呈兩段線性增長,60度以下靈敏度為3.2 mV/度,60-180度提升至8.6 mV/度,寬角度范圍充分覆蓋人體關(guān)節(jié)運(yùn)動(dòng)需求。響應(yīng)時(shí)間為200 ms,恢復(fù)時(shí)間100 ms,快速響應(yīng)特性滿足實(shí)時(shí)運(yùn)動(dòng)監(jiān)測場景(圖3b),并且具有上下彎曲方向識(shí)別能力上(圖3c)。信號(hào)重復(fù)性測試中(圖3d),在6-180度彎曲時(shí)信號(hào)一致性良好,即使6度微小彎曲也能產(chǎn)生穩(wěn)定可分辨的信號(hào)。頻率適應(yīng)性上(圖3e),在0.05-4 Hz頻率范圍內(nèi)均能有效捕獲,覆蓋人體關(guān)節(jié)日常運(yùn)動(dòng)的頻率范圍。長期穩(wěn)定性測試表明(圖3f),40度彎曲角度下經(jīng)過 10,000次循環(huán)后,輸出電勢無明顯衰減,展現(xiàn)出可靠的耐用性。
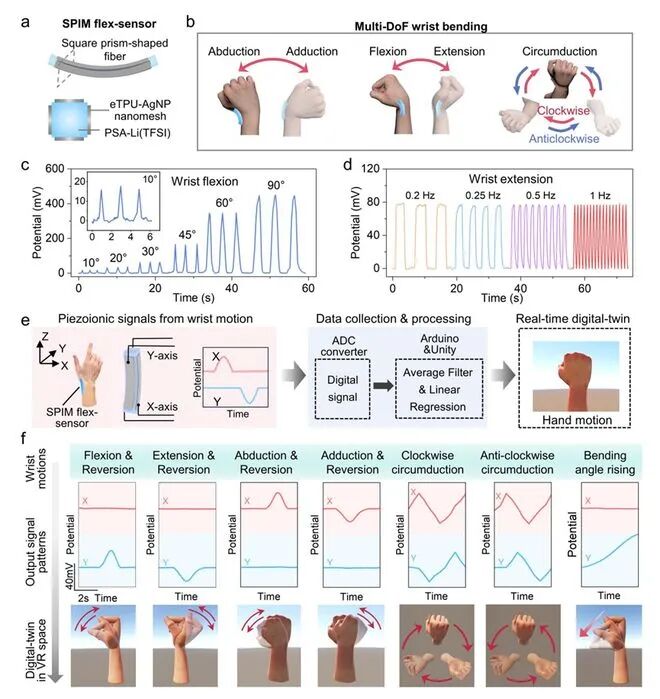
圖4.自由姿勢手部運(yùn)動(dòng)的數(shù)字孿生
基于多自由度響應(yīng)能力,SPIM傳感器實(shí)現(xiàn)了腕關(guān)節(jié)復(fù)雜運(yùn)動(dòng)的精準(zhǔn)捕獲與數(shù)字孿生重建,展示其運(yùn)動(dòng)追蹤應(yīng)用。傳感器采用四棱柱狀PSA-Li (TFSI)纖維搭配對(duì)稱eTPU-AgNP納米網(wǎng)格電極(圖4a),貼合腕骨位置可同步監(jiān)測多方向關(guān)節(jié)運(yùn)動(dòng),涵蓋腕關(guān)節(jié)屈曲/伸展、外展/內(nèi)收、順時(shí)針/逆時(shí)針環(huán)轉(zhuǎn)等復(fù)雜運(yùn)動(dòng)模式(圖4b)。頻率響應(yīng)測試中,40度伸展運(yùn)動(dòng)在0.2-1 Hz不同頻率下,傳感器輸出信號(hào)幅值穩(wěn)定,與驅(qū)動(dòng)頻率完全匹配,動(dòng)態(tài)響應(yīng)性能可靠(圖4d)。數(shù)字孿生流程通過傳感器采集信號(hào),經(jīng)ADC轉(zhuǎn)換、濾波處理及線性回歸分析后,在Unity引擎中實(shí)現(xiàn)手部運(yùn)動(dòng)的實(shí)時(shí)數(shù)字孿生,其中環(huán)轉(zhuǎn)運(yùn)動(dòng)時(shí),X-Y軸電極產(chǎn)生具有特定相位差的三角波信號(hào),可精準(zhǔn)還原運(yùn)動(dòng)軌跡,如視頻1所示。
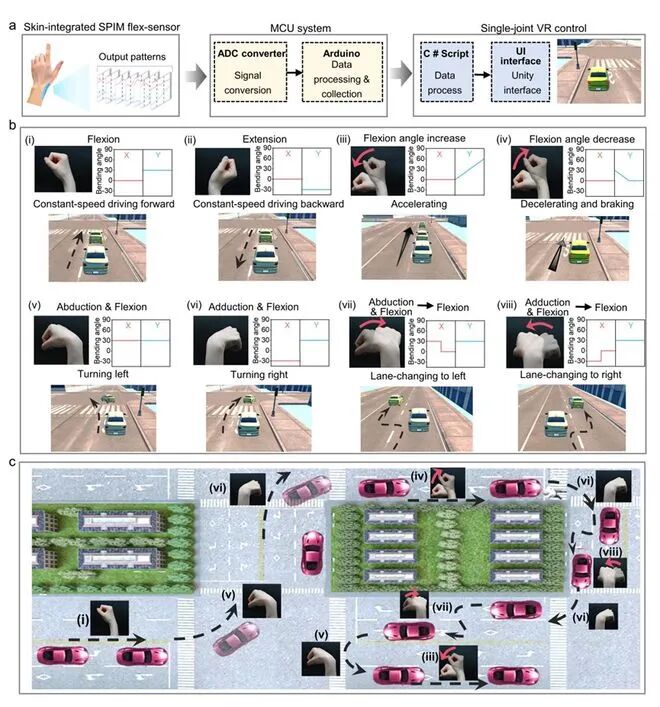
圖5.單一緊湊傳感器實(shí)現(xiàn)單關(guān)節(jié)虛擬現(xiàn)實(shí)控制
SPIM傳感器可通過單關(guān)節(jié)動(dòng)作實(shí)現(xiàn)VR場景的復(fù)雜控制,驗(yàn)證其作為人機(jī)交互接口的實(shí)用性與便捷性。皮膚集成的SPIM傳感器將腕關(guān)節(jié)彎曲的方向與幅度轉(zhuǎn)化為X、Y軸電勢信號(hào),經(jīng)MCU系統(tǒng)處理后,映射為VR場景中的控制指令,實(shí)現(xiàn)物理動(dòng)作到虛擬操作的直接轉(zhuǎn)換(圖5a)。圖5b中描述了8種核心駕駛指令,對(duì)應(yīng)腕關(guān)節(jié)的單一或組合動(dòng)作。在VR交通場景演示中(圖5c),佩戴傳感器的操作者通過簡單直觀的腕關(guān)節(jié)運(yùn)動(dòng),即可完成虛擬汽車的轉(zhuǎn)向、加速、變道等復(fù)雜操作(如視頻2所示),驗(yàn)證了傳感器在沉浸式交互中的高效性與直觀性,為元宇宙應(yīng)用提供了輕量化、高精度的控制方案。
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2577文章
55355瀏覽量
793289
發(fā)布評(píng)論請(qǐng)先 登錄
華南理工大學(xué):超靈敏橡膠傳感器,突破柔性傳感“不可能三角”

新加坡國立大學(xué):研發(fā)用于水下傳感應(yīng)用的自激式線性神經(jīng)形態(tài)柔性壓力傳感器

SCH16T-K01:高性能6自由度傳感器的技術(shù)剖析與應(yīng)用指南
首爾國立大學(xué):研究生物啟發(fā)型離子傳感器:將自然機(jī)制轉(zhuǎn)化為傳感技術(shù)

中科院/重慶大學(xué):仿生“電子皮膚”獲突破!梯度模量設(shè)計(jì)讓傳感器實(shí)現(xiàn)“寬壓域、高靈敏、抗漂移”

四川大學(xué):協(xié)同離子-電子傳輸應(yīng)變傳感器實(shí)現(xiàn)寬工作范圍內(nèi)超高且可調(diào)靈敏度
中科院寧波材料所:雙結(jié)構(gòu)石墨烯/PDMS復(fù)合傳感器,用于可穿戴設(shè)備應(yīng)用
同濟(jì)大學(xué):仿生納米通道氣凝膠晶體管,突破生物傳感靈敏度極限
南京理工大學(xué):研發(fā)柔性機(jī)械傳感器表界面微結(jié)構(gòu)-面向軟體機(jī)器人
清華大學(xué):研發(fā)高柔性壓電駐極體聲學(xué)傳感器,抗環(huán)境噪聲能力遠(yuǎn)超商用麥克風(fēng)
西南大學(xué),西華大學(xué),河北工業(yè)大學(xué),重慶大學(xué):基于雙介質(zhì)層的離子壓力傳感器耦合超高靈敏度和寬范圍檢
上海光機(jī)所在高數(shù)值孔徑多芯成像光纖微氣泡缺陷研究中取得進(jìn)展
十字形多自由度超聲電機(jī)接觸分析模型研究
Analog Devices Inc. ADIS16550六自由度慣性傳感器數(shù)據(jù)手冊(cè)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論