") 探索i.MX RT1180:高性能處理器的技術(shù)剖析與應(yīng)用指南
探索i.MX RT1180:高性能處理器的技術(shù)剖析與應(yīng)用指南

探索i.MX RT1180:高性能處理器的技術(shù)剖析與應(yīng)用指南
在當(dāng)今科技飛速發(fā)展的時(shí)代,高性能處理器在工業(yè)自動(dòng)化、物聯(lián)網(wǎng)等眾多領(lǐng)域發(fā)揮著至關(guān)重要的作用。NXP Semiconductors的i.MX RT1180 Crossover Processors以其卓越的性能和豐富的功能,成為了眾多工程師關(guān)注的焦點(diǎn)。今天,我們就來(lái)深入剖析這款處理器,探討其特點(diǎn)、技術(shù)參數(shù)以及在實(shí)際設(shè)計(jì)中的應(yīng)用要點(diǎn)。
文件下載:NXP Semiconductors i.MX RT1180交叉微控制器 (MCU).pdf
一、i.MX RT1180 簡(jiǎn)介
i.MX RT1180是i.MX RT系列中的高性能處理器,它集成了高性能的Arm? Cortex? - M7核心和高效節(jié)能的Cortex - M33核心。M7核心最高運(yùn)行速度可達(dá)800 MHz,M33核心最高可達(dá)300 MHz,這種雙核心的設(shè)計(jì)為不同類型的應(yīng)用提供了強(qiáng)大的處理能力。
它具備工業(yè)網(wǎng)關(guān)能力,通過先進(jìn)的以太網(wǎng)交換子系統(tǒng)和1.5 MB的片上RAM(帶ECC保護(hù)),支持工業(yè)實(shí)時(shí)協(xié)議(如Profinet、EtherCAT、EtherNet/IP等)以及最新的基于TSN的協(xié)議。此外,它還集成了先進(jìn)的電源管理模塊,簡(jiǎn)化了外部電源供應(yīng)的復(fù)雜度和電源排序。
應(yīng)用場(chǎng)景廣泛
i.MX RT1180適用于各種領(lǐng)域的應(yīng)用,如工業(yè)自動(dòng)化、樓宇自動(dòng)化、能源和物聯(lián)網(wǎng)等。具體應(yīng)用包括AC驅(qū)動(dòng)器、伺服驅(qū)動(dòng)器、網(wǎng)關(guān)、電機(jī)控制和工業(yè)網(wǎng)絡(luò)配套芯片等。
二、功能特性詳解
核心平臺(tái)特性
- Arm Cortex - M7核心平臺(tái):擁有32 KB的L1指令緩存和32 KB的L1數(shù)據(jù)緩存,支持單精度和雙精度浮點(diǎn)運(yùn)算單元(FPU),集成了最多16個(gè)獨(dú)立保護(hù)區(qū)域的內(nèi)存保護(hù)單元(MPU),總共有最多512 KB的I - TCM和D - TCM。在1.1 V(過驅(qū)動(dòng))下,頻率可達(dá)800 MHz,并且緩存和緊密耦合內(nèi)存(TCM)都支持ECC。
- Arm Cortex - M33核心平臺(tái):可用于啟動(dòng)和客戶應(yīng)用,具備16 KB的代碼緩存、16 KB的系統(tǒng)緩存和256 KB的TCM(也可作為SRAM供系統(tǒng)其他部分訪問),在1.1 V無(wú)體偏置的情況下,頻率為300 MHz,緩存和TCM同樣支持ECC。
內(nèi)存接口
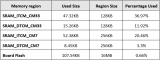
- 片上內(nèi)存:包括160 KB的啟動(dòng)ROM、512 KB帶ECC的CM7 TCM、256 KB帶ECC的CM33 TCM和768 KB帶ECC的專用OCRAM。
- 外部?jī)?nèi)存接口:
接口特性
- 音頻接口:支持SPDIF輸入和輸出、支持I2S、AC97、TDM和編解碼器/DSP接口的同步音頻接口(SAI)模塊、8通道PDM數(shù)字麥克風(fēng)輸入以及異步采樣率轉(zhuǎn)換器(ASRC)。
- 通信接口:包括USB 2.0 OTG控制器(帶集成PHY接口)、Ultra Secure Digital Host Controller(uSDHC)接口、低功耗通用異步收發(fā)器(LPUART)模塊、LPI2C模塊、I3C模塊、LPSPI模塊、Control Area Network(FlexCAN)模塊、FlexIO模塊和先進(jìn)靈活的以太網(wǎng)接口。
- ADC/CMP:擁有16位雙通道SAR ADC(每個(gè)ADC可同時(shí)進(jìn)行2次轉(zhuǎn)換,3.5 Msps)、12位DAC、模擬比較器(ACMP)、SINC濾波器(4通道)和電壓參考(VREF)。
- GPIO和引腳復(fù)用:具備帶中斷能力的通用輸入/輸出(GPIO)模塊和輸入/輸出復(fù)用控制器(IOMUXC),提供集中的焊盤控制。
電源管理與控制
定時(shí)器和PWMs
- 包括通用可編程定時(shí)器(GPT)模塊、低功耗周期性中斷定時(shí)器(LPIT)模塊、定時(shí)器/PWM模塊(TPM)、低功耗定時(shí)器(LPTMR)模塊、Quad Timer(TMR)模塊、FlexPWM模塊、增強(qiáng)型正交解碼器(eQDC)和看門狗定時(shí)器(WDOG)。
系統(tǒng)調(diào)試與安全功能
- 支持Arm Cortex - M7 CoreSight?調(diào)試和跟蹤架構(gòu),以及CoreSight Serial Wire Output(SWO)和嵌入式跟蹤路由器(ETR),可將跟蹤數(shù)據(jù)路由到系統(tǒng)內(nèi)存。
- 支持5引腳(JTAG)和SWD調(diào)試接口。
- 安全功能由多種硬件加速實(shí)現(xiàn),包括Trusted Resource Domain Controller(TRDC)、TrustZone? - M(TZ - M)、Physical Unclonable Function(PUF)、EdgeLock?安全飛地、電池備份安全模塊(BBSM)、內(nèi)聯(lián)加密引擎(IEE)和On - The - Fly AES Decryption(OTFAD)等。
三、電氣特性分析
芯片級(jí)條件
- 絕對(duì)最大額定值:需要注意各電源引腳的電壓范圍,如VDD_SOC為 - 0.3至1.2 V,DCDC_IN為 - 0.3至3.96 V等,超出這些范圍可能會(huì)對(duì)設(shè)備造成永久性損壞。
- 熱特性:不同封裝的熱阻不同,如14 x 14 mm封裝的結(jié)到環(huán)境熱阻為26.3℃/W,了解這些參數(shù)有助于進(jìn)行散熱設(shè)計(jì)。
- 電源架構(gòu):集成了DCDC和LDOs,可根據(jù)不同的負(fù)載電流配置DCDC的工作模式,以提高效率。
- 工作范圍:不同核心在不同頻率下的工作電壓范圍不同,例如M7核心在800 MHz時(shí),VDD_SOC為1.1至1.15 V,并且在頻率高于600 MHz時(shí)需要啟用FBB。
- 最大供應(yīng)電流:給出了不同電源軌的最大電流,如DCDC_IN在105/125°時(shí)最大電流為1000 mA,這對(duì)于電源設(shè)計(jì)的功率預(yù)算非常重要。
- 典型功率模式供應(yīng)電流:詳細(xì)列出了不同功率模式下(如過驅(qū)動(dòng)運(yùn)行、正常驅(qū)動(dòng)運(yùn)行、欠驅(qū)動(dòng)運(yùn)行等)的電流和功耗,幫助工程師評(píng)估系統(tǒng)的功耗情況。
系統(tǒng)電源和時(shí)鐘
- 電源供應(yīng)要求和限制:電源上電和下電順序有嚴(yán)格要求,如VDD_BBSM_IN必須在其他電源之前開啟,并且需要注意DCDC_PSWITCH的延遲和電壓要求。
- 內(nèi)部POR和電源檢測(cè):內(nèi)部檢測(cè)器監(jiān)控VDD_SOC,當(dāng)VDD_SOC低于一定值時(shí),內(nèi)部POR會(huì)被觸發(fā)。
- 集成LDO電壓調(diào)節(jié)器參數(shù):不同的LDO(如LDO_BBSM_ANA、LDO_PLL等)有各自的電壓輸出范圍、輸出電流和外部去耦電容要求。
- DCDC:可配置為節(jié)能模式,具備過流保護(hù)、過壓保護(hù)、低壓檢測(cè)和低壓警告等保護(hù)功能。
- PLL的電氣特性:不同的PLL(如音頻PLL、528 MHz PLL等)有不同的時(shí)鐘輸出范圍、參考時(shí)鐘和鎖定時(shí)間等參數(shù)。
- 片上振蕩器:有外部輸入時(shí)鐘(RTC_XTALI和XTALI)和內(nèi)部環(huán)形振蕩器,建議使用外部晶體作為RTC_XTALI的時(shí)鐘源。
I/O參數(shù)
- I/O DC參數(shù):包括XTALI和RTC_XTALI的DC輸入電壓范圍,以及不同GPIO銀行的DC規(guī)格,如輸入電壓范圍、輸出電流和上拉/下拉電阻等。
- I/O AC參數(shù):給出了不同GPIO銀行的最大頻率、上升時(shí)間和下降時(shí)間等動(dòng)態(tài)參數(shù),對(duì)于高速信號(hào)處理設(shè)計(jì)非常關(guān)鍵。
系統(tǒng)模塊
- 復(fù)位時(shí)序參數(shù):POR_B的有效持續(xù)時(shí)間有要求,以確保系統(tǒng)正確啟動(dòng)。
- JTAG和SWD時(shí)序參數(shù):規(guī)定了JTAG和SWD的時(shí)鐘頻率、周期時(shí)間、數(shù)據(jù)設(shè)置時(shí)間和保持時(shí)間等參數(shù),方便進(jìn)行調(diào)試接口設(shè)計(jì)。
外部?jī)?nèi)存接口
- SEMC規(guī)格:有異步和同步模式,每種模式都有不同的輸出和輸入時(shí)序要求,如地址輸出有效時(shí)間、數(shù)據(jù)輸出有效時(shí)間等。
- SRAMC參數(shù):在異步模式下有特定的輸出和輸入時(shí)序。
- FlexSPI參數(shù):不同的模式(如SDR和DDR)有不同的輸入/輸出時(shí)序要求,并且不同的引腳復(fù)用選項(xiàng)有不同的性能規(guī)格。
音頻
- PDM麥克風(fēng)接口時(shí)序參數(shù):在時(shí)鐘分頻器啟用時(shí),PDM麥克風(fēng)需要滿足特定的設(shè)置和保持時(shí)序要求。
- SAI/I2S切換規(guī)格:在控制器和目標(biāo)模式下,SAI有不同的AC時(shí)序要求。
- SPDIF時(shí)序參數(shù):SPDIF數(shù)據(jù)采用雙相標(biāo)記碼發(fā)送,有特定的調(diào)制時(shí)鐘時(shí)序。
模擬
- 16位ADC電氣規(guī)格:包括ADC的工作條件(如電源電壓、參考電壓等)和電氣特性(如電流消耗、差分非線性、積分非線性等)。
- 電壓參考(VREF):有特定的電氣規(guī)格,如輸出電壓、溫度系數(shù)和驅(qū)動(dòng)強(qiáng)度等。
- 12位DAC電氣特性:包括輸出負(fù)載電容、輸出負(fù)載電流、線性度和建立時(shí)間等參數(shù)。
- ACMP電氣規(guī)格:規(guī)定了模擬輸入電壓、輸入偏移電壓和比較器滯后等參數(shù)。
- SINC濾波器規(guī)格:有外部調(diào)制器時(shí)鐘頻率和數(shù)據(jù)設(shè)置/保持時(shí)間等時(shí)序參數(shù)。
- 溫度傳感器規(guī)格:測(cè)量溫度范圍為 - 40至125℃,不同溫度范圍有不同的測(cè)量精度。
通信接口
- LPSPI時(shí)序參數(shù):在控制器和外設(shè)模式下,LPSPI有不同的時(shí)鐘頻率、數(shù)據(jù)設(shè)置時(shí)間和保持時(shí)間等參數(shù)。
- LPI2C模塊時(shí)序參數(shù):支持多種模式,不同模式有不同的SCL時(shí)鐘頻率。
- I3C規(guī)格:符合MIPI I3C v1.1.1和I3C Basic v1.1.1,有特定的推挽時(shí)序參數(shù)。
- uSDHC AC時(shí)序:包括不同模式(如SD3.0/eMMC4.3、eMMC4.4/4.41/SD3.0等)的時(shí)鐘頻率、輸出延遲和輸入設(shè)置/保持時(shí)間等參數(shù)。
- 網(wǎng)絡(luò)AC電氣規(guī)格:包括MII、RMII、RGMII、1588和管理接口的時(shí)序參數(shù)。
- EtherCAT:在MII模式下,接收器和發(fā)送器有不同的時(shí)鐘頻率和數(shù)據(jù)設(shè)置/保持時(shí)間要求。
其他模塊
- FlexIO電氣規(guī)格:規(guī)定了輸出和輸入延遲偏差。
- USB PHY參數(shù):符合USB 2.0 OTG的電氣合規(guī)要求。
- 定時(shí)器:不同的定時(shí)器(如PWM、Quad Timer等)有不同的時(shí)鐘頻率和輸出偏差等參數(shù)。
- BBSM:有特定的DC規(guī)格和篡改規(guī)格,用于安全監(jiān)控。
三、啟動(dòng)模式配置
啟動(dòng)模式配置引腳
通過3個(gè)BOOT_MODE引腳可以實(shí)現(xiàn)壓縮的啟動(dòng)模式解碼,不同的引腳組合對(duì)應(yīng)不同的啟動(dòng)類型,如從內(nèi)部熔絲啟動(dòng)、串行下載器、eMMC 8位啟動(dòng)等。
啟動(dòng)設(shè)備接口分配
詳細(xì)列出了不同啟動(dòng)模式下使用的接口和引腳復(fù)用選項(xiàng),如通過NAND、FlexSPI1、FlexSPI2等啟動(dòng)時(shí)的引腳分配。
四、封裝信息
文檔提供了14 x 14 mm、12 x 12 mm和10 x 10 mm三種封裝的信息,包括球矩陣、電源供應(yīng)接觸分配、功能接觸分配和球圖等。這些信息對(duì)于PCB設(shè)計(jì)非常重要,工程師可以根據(jù)封裝信息進(jìn)行引腳布局和電源布線。
五、總結(jié)與思考
i.MX RT1180 Crossover Processors憑借其強(qiáng)大的處理能力、豐富的功能特性和廣泛的應(yīng)用場(chǎng)景,為工程師在設(shè)計(jì)高性能系統(tǒng)時(shí)提供了一個(gè)優(yōu)秀的選擇。在實(shí)際設(shè)計(jì)過程中,我們需要深入理解其各項(xiàng)技術(shù)參數(shù)和特性,合理選擇工作模式和配置,以滿足不同應(yīng)用的需求。
同時(shí),我們也要注意其電氣特性和時(shí)序要求,確保系統(tǒng)的穩(wěn)定性和可靠性。例如,在電源設(shè)計(jì)中要嚴(yán)格遵循上電和下電順序,在高速信號(hào)處理中要考慮I/O的AC參數(shù)。
那么,在你的項(xiàng)目中,你會(huì)如何利用i.MX RT1180的這些特性來(lái)實(shí)現(xiàn)更高效、更穩(wěn)定的設(shè)計(jì)呢?歡迎在評(píng)論區(qū)分享你的想法和經(jīng)驗(yàn)。
-
應(yīng)用指南
+關(guān)注
關(guān)注
0文章
93瀏覽量
6117
發(fā)布評(píng)論請(qǐng)先 登錄
探索NXP i.MX 93應(yīng)用處理器家族:高效邊緣計(jì)算的理想之選
深入剖析PCA9452:i.MX 93應(yīng)用處理器的理想電源管理方案
探索i.MX 91應(yīng)用處理器家族:為邊緣應(yīng)用帶來(lái)新可能
在恩智浦i.MX RT1180跨界處理器上如何實(shí)現(xiàn)1588協(xié)議同步

i.MX RT1180實(shí)現(xiàn)EtherCAT+伺服控制的終極實(shí)踐
恩智浦推出i.MX 952人工智能應(yīng)用處理器
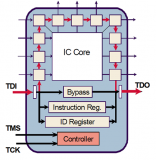
恩智浦i.MX RT1180 MCU如何進(jìn)入Boundary Scan模式
RT1180 FlexSPI Follower模塊簡(jiǎn)介

RT1180 XMCD的特點(diǎn)和使用注意事項(xiàng)

恩智浦i.MX RT1180跨界MCU助力下一代伺服控制系統(tǒng)
恩智浦i.MX RT1180跨界處理器如何選型

基于恩智浦i.MX RT1180芯片的EtherCAT+伺服電機(jī)控制方案

恩智浦MCU方案 單顆i.MX RT1180實(shí)現(xiàn)EtherCAT+伺服控制
如何使用帶有i.MX 93處理器的Segger J-link在VSCode中進(jìn)行調(diào)試?
NXP基于i.MX 91應(yīng)用處理器打造的FRDM i.MX 91開發(fā)板特性參數(shù)詳解




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論