") 激光雷達點云中“鬼影”和“膨脹”是什么原因導致的?
激光雷達點云中“鬼影”和“膨脹”是什么原因導致的?

[首發(fā)于智駕最前沿微信公眾號]激光雷達是自動駕駛汽車重要的感知硬件之一,已成為許多車企的主流選擇。激光雷達不斷向周圍環(huán)境發(fā)射激光束,并接收從物體表面反射回來的光信號,依據光的飛行時間計算出目標的距離、位置,從而生成三維點云。基于這一原理,激光雷達能夠為自動駕駛系統(tǒng)提供對前方障礙物清晰、精準的感知能力。
但在實際應用中,當激光束照射到如車牌金屬層、鋁合金交通標志牌或反光膠貼等反射率極高的表面時,其反射過程便無法與常規(guī)物體那樣“理想”。這些表面會將大量激光能量幾乎無損地沿原路強烈反射回接收器。由于激光雷達接收器對強反射信號極為敏感,這種情形容易在點云數(shù)據中引發(fā)“鬼影”與“膨脹”的問題。這些因高反射表面引起的點云誤差,無疑給后續(xù)的感知算法帶來非常大的挑戰(zhàn)。

鬼影和膨脹是個啥?
所謂鬼影,就是指點云中出現(xiàn)了實際環(huán)境并不存在的虛假物體輪廓。舉個例子,一塊位于車輛左側的交通標志牌,其強反射信號可能在點云中于車輛前方或右側錯誤地生成一個類似的點云簇,導致系統(tǒng)誤判為真實障礙,引發(fā)不必要的減速或避讓,這會嚴重影響感知可靠性。
含有“鬼影”的點云
膨脹則是指真實物體的點云輪廓因信號過強而向外擴散,使其尺寸被顯著放大。繼續(xù)以一個例子來理解下,一塊寬僅幾十厘米的反光標牌,可能在點云中呈現(xiàn)為一兩米寬的模糊團塊。這不僅影響對物體實際尺寸的準確判斷,還會干擾后續(xù)的障礙物分類、跟蹤等關鍵感知任務。
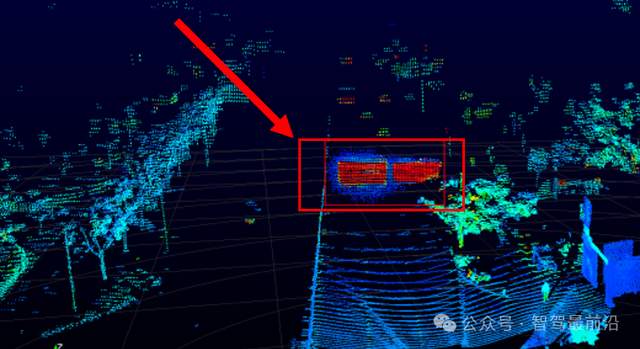
路牌點云“膨脹”
這兩種誤差都會直接增加感知算法精準識別與環(huán)境理解的難度。

為什么高反射物體會讓激光雷達出問題
從剛剛的兩個概念中我們會發(fā)現(xiàn),點云出現(xiàn)鬼影和膨脹的問題,都是高反射物體造成的。要理解這些問題出現(xiàn)的原因,需要回到激光雷達的信號發(fā)射和接收機制本身。激光雷達發(fā)射的光是非常短的脈沖,它們在空間中擴散,然后擊中物體表面。一部分光被吸收,一部分光被散射,還有一部分被反射回傳感器。感知系統(tǒng)會根據返回光的時間來計算距離位置。
正常情況下,大多數(shù)物體都是漫反射表面。所謂漫反射,就是光打上去以后向各個方向平均散開,返回到接收器的只有一小部分,它們的強度相對適中,信號和噪聲比(SNR)穩(wěn)定。
但高反射物體并不是漫反射表面,它們屬于高反射表面甚至是角反射體。所謂角反射體,就是指光線打上去之后大部分能沿入射方向原路返回(類似交通標牌上的那種材料效果)。這種物體會在短時間內把很多光“推回”激光雷達接收器。由于物體表面和入射角的不同,高反射物體產生的激光回波強度會遠高于漫反射物體。
這種強反射帶來的直接結果,就是接收器會捕獲到強度異常高的回波信號。激光雷達的探測器依據信號強度進行判斷,當遇到如此強烈的回波時,便會將其直接認定為有效的空間反射點,從而把這些異常信號當作真實物體的位置信息予以記錄和處理。
有些強反射有時還不是直接返回,其可能發(fā)生多次反射或者在不同路徑上傳播后再反射回來。如光線在傳感器內部某些表面反射之后,再次被高反射目標反射回來,這種經過額外路徑的信號也可能被接收器捕捉到。由于這類多次反射回來的信號實際經過的時間比直接反射要長,系統(tǒng)就會錯誤地認為這個點離得更遠,從而在點云上形成“在真實物體后方”的虛假點,也就是鬼影。
還有一種情況是當高反射信號太強的時候,會對雷達內部多個通道之間產生串擾。激光雷達通常由許多發(fā)射和接收通道組成,它們在同一時間內同時工作。當某個通道接收到過強的反射時,這個強信號可能會泄漏到其他通道的接收模塊里,使得那些通道錯誤地產生點。這種不同通道之間的干擾,也是鬼影產生的一個重要原因。

鬼影和膨脹為什么看起來那么“像真的”
理解了信號為何出錯,我們就可以解釋為什么鬼影和膨脹看起來特別容易迷惑自動駕駛系統(tǒng)。
激光雷達輸出的是點云數(shù)據,每一個激光脈沖返回后都會在三維空間里生成一個點,表示那里有反射體。如果這些點來自真實障礙物,那么整個點云就描述了障礙物的形狀和位置。但如果這些點是錯誤的返回結果,它們在空間里的分布仍然可能形成一個看起來有結構、有形狀的團簇,這樣的虛假的“形狀”在視覺上也會被感知算法錯誤識別為真實物體。
高反射物體除了在真實位置反射,也會在附近產生多個不同距離、不同角度的次級反射回波。這些次級回波還不是真正的噪點,而是有一定規(guī)律的分布,這就讓錯誤點看起來有連續(xù)性。算法在聚類分析或分類判斷的時候會把它們當成真實目標的延伸,從而誤判目標尺寸、方位甚至移動軌跡。
膨脹現(xiàn)象有點像“點云模糊”。因為高反射信號的強度和接收器的動態(tài)響應可能導致飛行時間的微小誤差,或者影響激光束在周邊空間的探測結果。這就使得原本應該集中在物體表面的點云被“拉散”了一點,看上去比實際更寬、更大。雖然這些點并不是虛假物體,但它們在空間分布上的擴散讓感知系統(tǒng)誤以為物體比實際更大。

最后的話
高反射物體帶來的激光雷達鬼影和膨脹現(xiàn)象,是激光雷達技術必須面對的難題。其背后的根本原因,就是高反射表面產生了異常強的回波信號和多路徑反射,導致接收器接收到的信號不再是簡單的一次主反射,而是夾雜了大量次級返回和串擾。這些錯誤信號被誤當成真實點,就形成了看似真實卻不存在的點云結構(鬼影),或者把真實物體的點云范圍拉得更大(膨脹)。只有解決這些問題,才能讓自動駕駛的感知更加精準。
-
激光雷達
+關注
關注
981文章
4511瀏覽量
196792 -
自動駕駛
+關注
關注
794文章
14931瀏覽量
180692
發(fā)布評論請先 登錄
固態(tài)激光雷達參數(shù)以及避障視頻
為什么自動駕駛激光雷達點云中間是黑洞?

激光雷達點云中的空洞現(xiàn)象是什么原因導致的?
灰塵是如何影響激光雷達識別效果的?

如何解決激光雷達點云中“鬼影”和“膨脹”問題?

激光雷達點云為什么會出現(xiàn)吸點現(xiàn)象?
禾賽科技與理想汽車續(xù)簽激光雷達合作
納芯微柵極驅動器NSD2017在激光雷達應用中PCB設計的注意點

自動駕駛里的激光雷達有何作用?


全固態(tài)激光雷達為什么遲遲未來?其技術難點是什么?
自動駕駛只用激光雷達進行感知會有哪些問題?
SPAD席卷車載激光雷達市場
自動駕駛激光雷達:原理、類型與應用梳理




 工商網監(jiān)
工商網監(jiān)
評論