 VL53L1CB小板開發(2)----修改測距范圍及測量頻率
VL53L1CB小板開發(2)----修改測距范圍及測量頻率

概述
VL53L1CB傳感器是一款高性能的飛行時間(Time-of-Flight)傳感器,廣泛應用于各種距離測量和目標檢測場景。其靈活的配置選項使得用戶可以根據具體應用需求調整測距范圍和測量頻率,從而實現最佳性能。本篇文章將介紹如何通過修改VL53L1CB傳感器的測距范圍和測量頻率來滿足不同應用場景的需求。
最近在弄ST Demo,需要樣片的可以加群申請:615061293 。
視頻教學
[https://www.bilibili.com/video/BV1WWBRY8EWS]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
完整代碼下載
[https://download.csdn.net/download/qq_24312945/90228600
測距范圍
VL53L4CX傳感器支持多種測距模式,包括短距離、中距離和長距離模式。每種模式針對不同的測量距離進行了優化,用戶可以根據目標物體與傳感器之間的距離選擇合適的測距模式:
● 短距離模式:適用于目標物體距離較近的應用,提供較高的測量精度和響應速度。
● 中距離模式:在一定距離范圍內平衡了測量精度和響應速度,適用于多數通用測量應用。
● 長距離模式:適用于目標物體距離較遠的應用,能夠覆蓋更大的測量范圍,但響應時間相對較長。
測量頻率
測量頻率決定了傳感器進行測距操作的頻次。通過調整測量頻率,用戶可以在響應速度和功耗之間找到平衡點:
● 高頻測量:適用于需要實時監測和快速響應的應用場景,如手勢識別和快速移動物體檢測。然而,高頻測量會增加功耗。
● 低頻測量:適用于功耗敏感的應用,如電池供電設備或對響應速度要求較低的場景。低頻測量可以顯著降低功耗。
本文將詳細介紹如何配置VL53L4CX傳感器的測距范圍和測量頻率,包括具體的配置方法、相關代碼示例以及在實際應用中的注意事項。通過合理調整這些參數,用戶可以充分發揮VL53L4CX傳感器的性能優勢,滿足各種復雜多樣的應用需求。
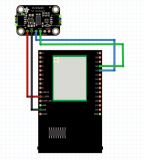
硬件準備
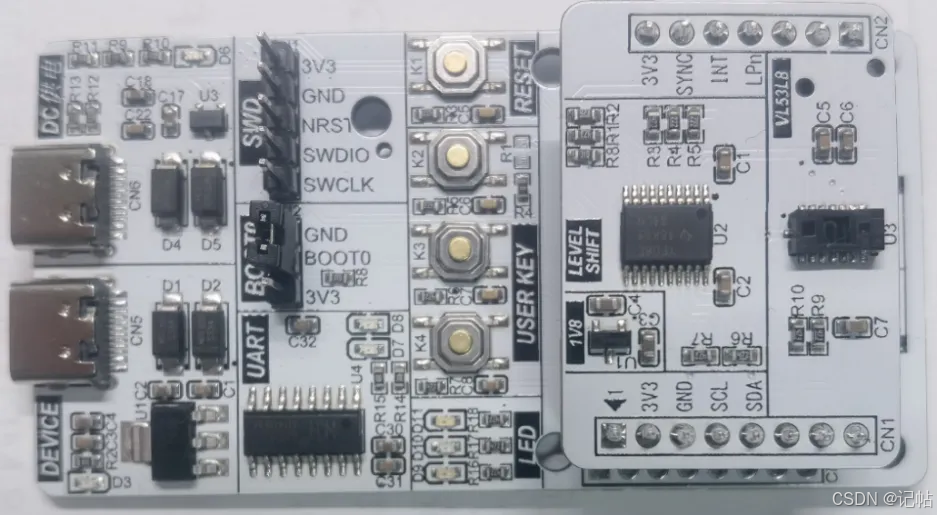
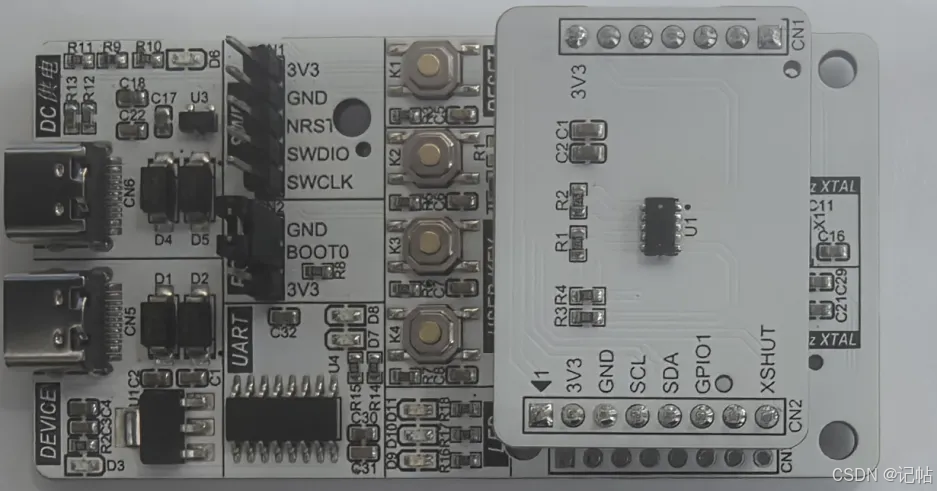
首先需要準備一個開發板,這里我準備的是自己繪制的開發板,需要的可以進行申請。
主控為STM32H503CBT6,TOF為VL53L4CX

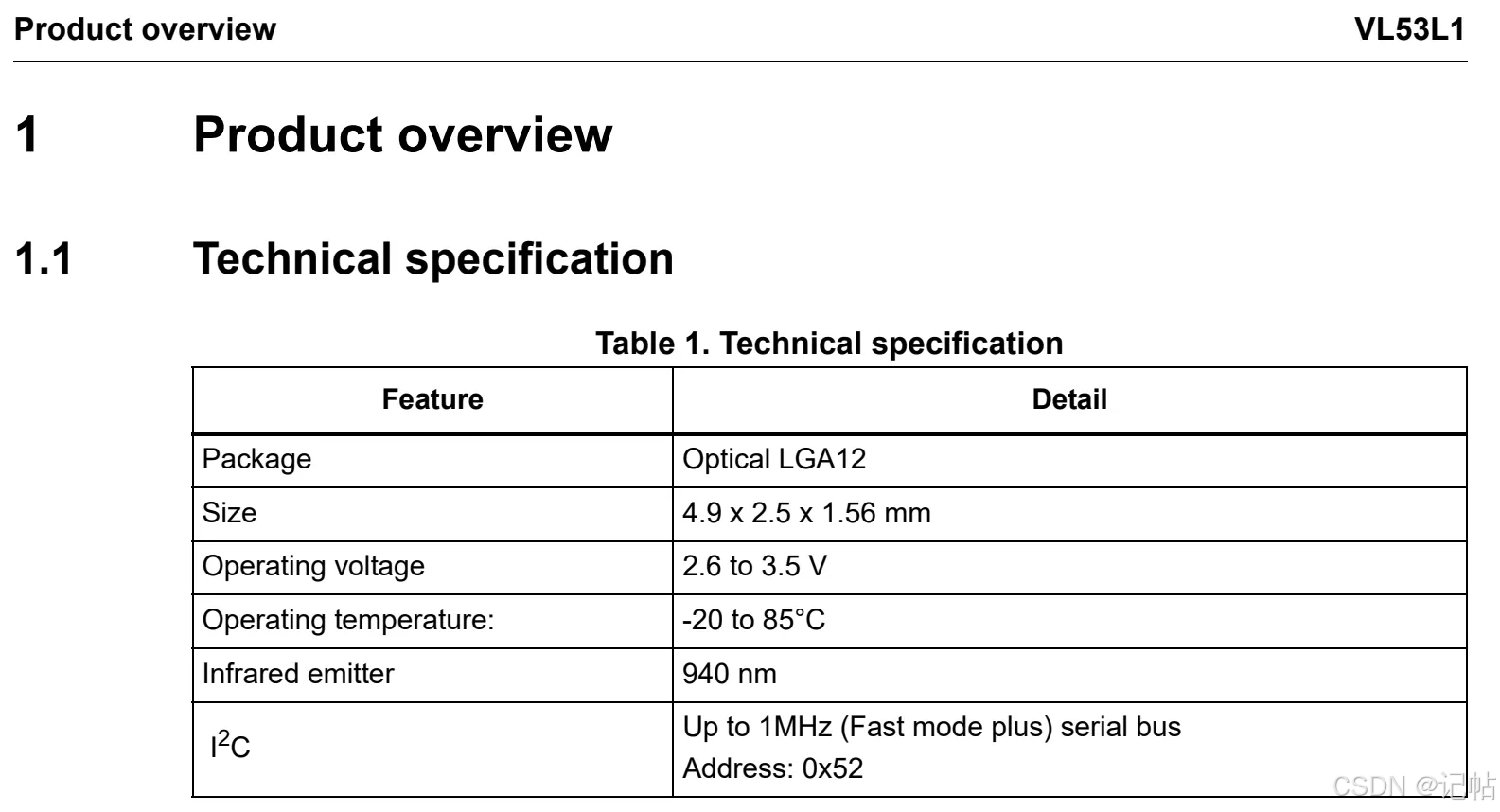
技術規格
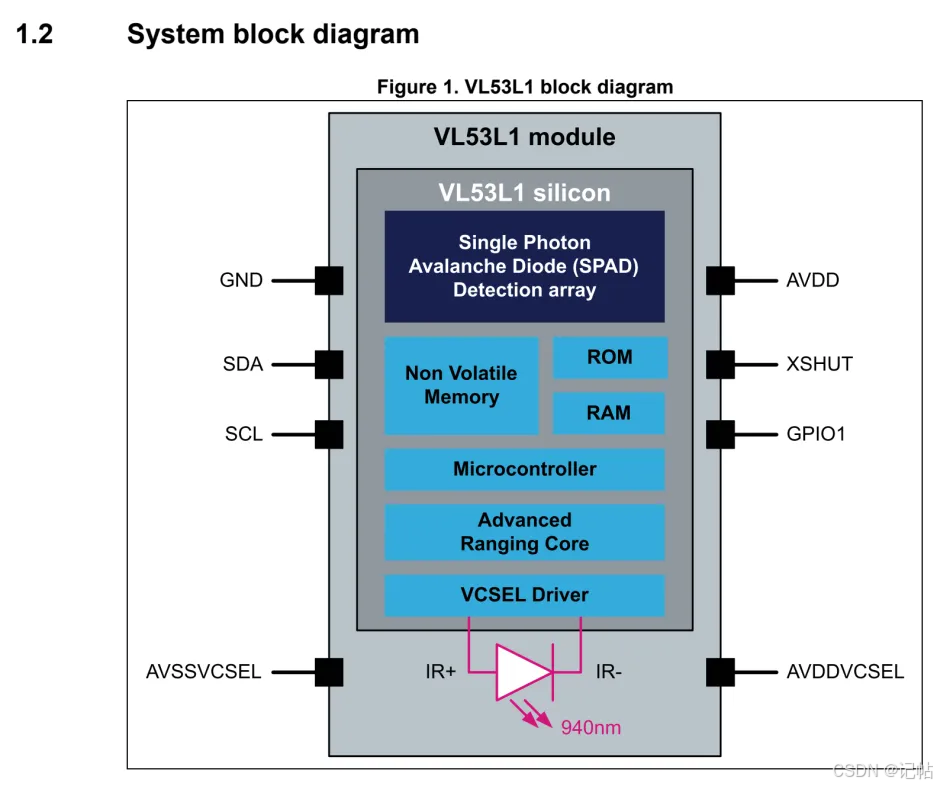
系統框圖
參考程序
https://github.com/CoreMaker-lab/VL53L1CB
https://gitee.com/CoreMaker/VL53L1CB
生成STM32CUBEMX
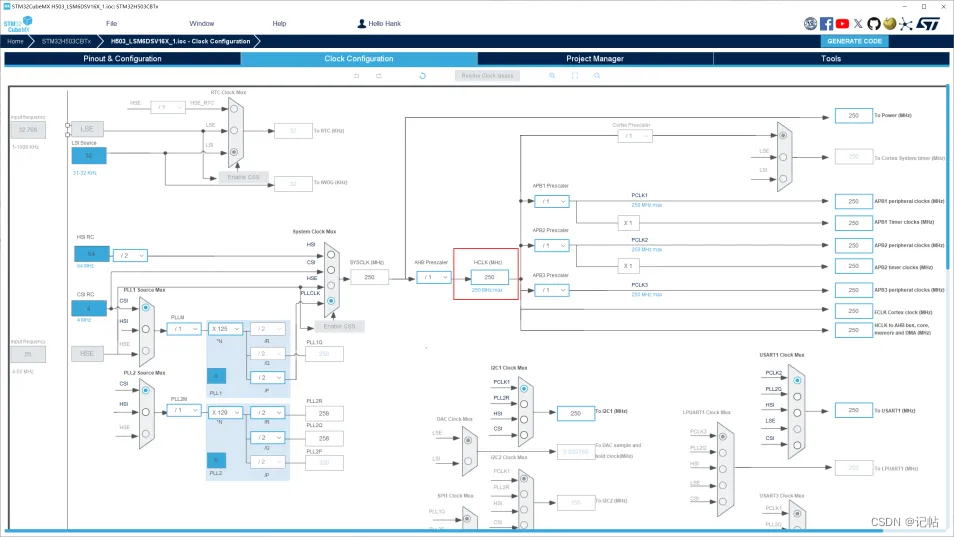
用STM32CUBEMX生成例程,這里使用MCU為STM32H503CB。 配置時鐘樹,配置時鐘為250M。
串口配置
查看原理圖,PA9和PA10設置為開發板的串口。
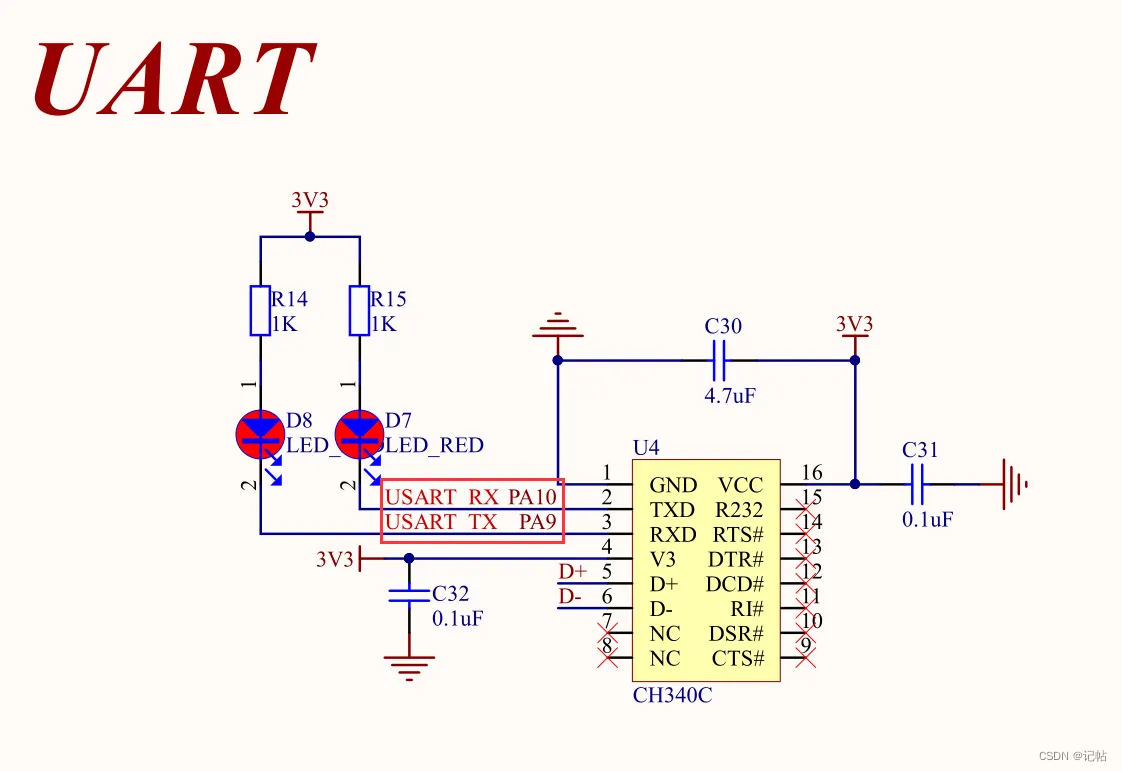
配置串口,速率為115200。

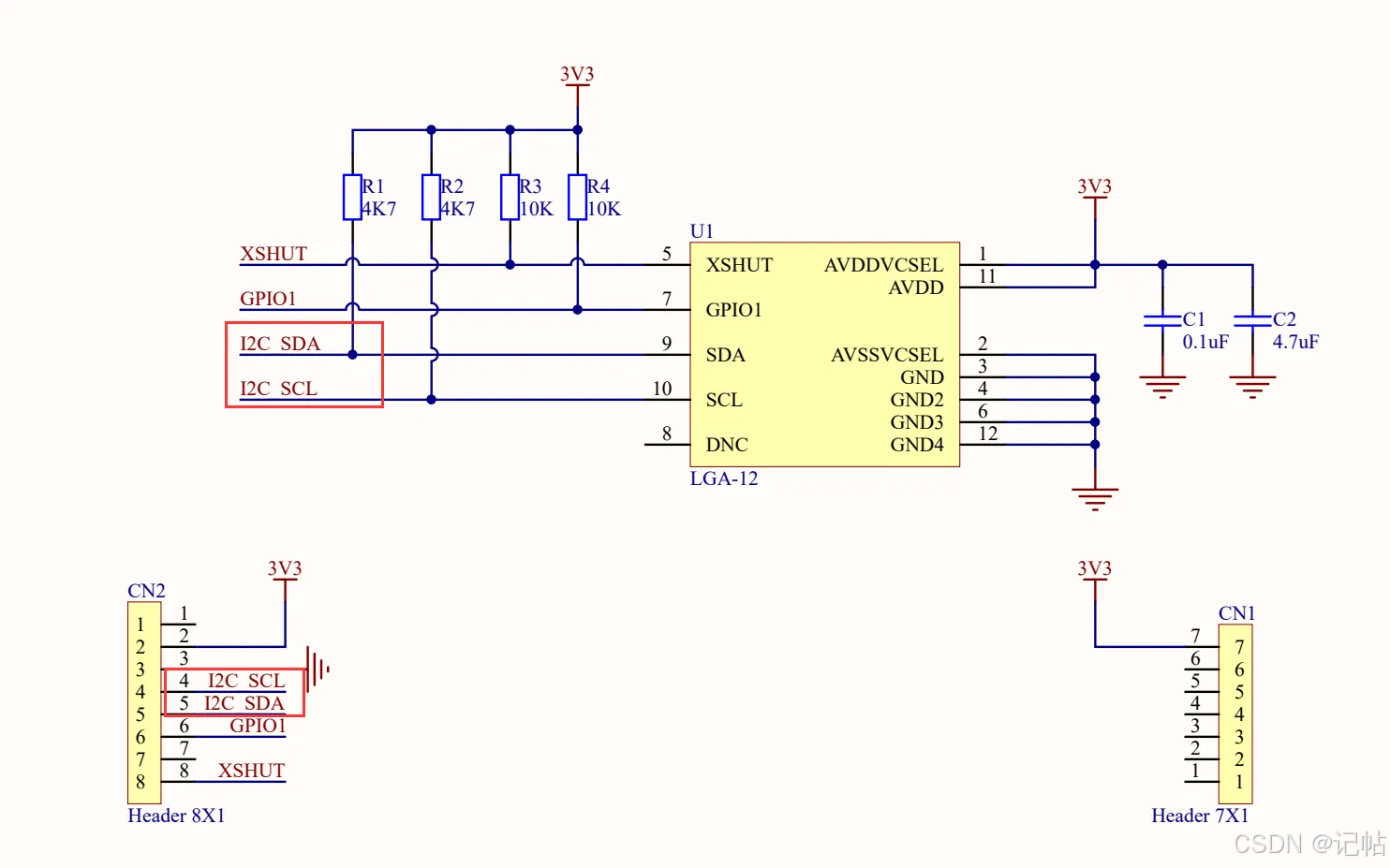
IIC配置
在這個應用中,VL53L1CB模塊通過I2C(IIC)接口與主控器通信。具體來說,VL53L1CB模塊的I2C引腳連接到主控器的PB6和PB7兩個IO口。

配置IIC為快速模式,速度為400k。

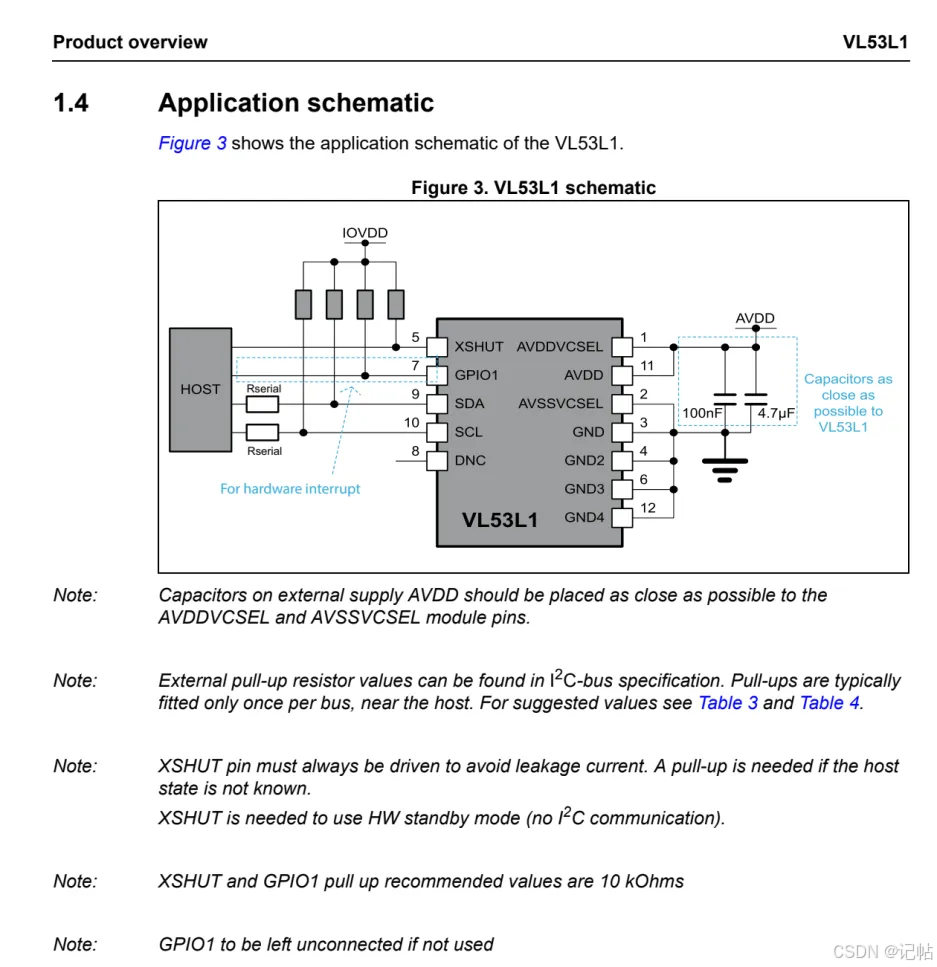
XSHUT
XSHUT引腳是由主機連接和控制的,這種設計優化了功耗,因為設備在不使用時可以被完全關閉,然后通過主機使用XSHUT引腳來喚醒。當AVDD存在且XSHUT為低電平時,設備處于硬件待機模式(HW Standby mode)。如果XSHUT引腳不由主機控制,而是通過上拉電阻連接到AVDD,那么設備在固件啟動(FW BOOT)后會自動進入軟件待機(SW STANDBY),而不會進入硬件待機。



GPIO1
當傳感器完成一次測距操作時,GPIO1引腳可以被配置為輸出中斷信號,通知微控制器讀取測量結果。
這種方式比持續輪詢傳感器狀態更加高效,尤其在低功耗應用中非常有用。




X-CUBE-TOF1
本節介紹在不需要使用樣例應用時如何使用STM32CubeMX將X-CUBE-TOF1軟件包添加到項目中。有了這樣的設置,就只配置了驅動層。

app_tof.c
app_tof.c定義了一個靜態函數 MX_VL53L1CB_SimpleRanging_Process,用于配置和執行VL53L1CB傳感器的簡單測距操作。

詳細解釋
- CUSTOM_RANGING_SENSOR_ReadID(CUSTOM_VL53L1CB, &Id);:
- ○ 讀取傳感器的ID,并將其存儲在變量 Id 中。
- CUSTOM_RANGING_SENSOR_GetCapabilities(CUSTOM_VL53L1CB, &Cap);:
- ○ 獲取傳感器的能力,并將其存儲在 Cap 結構中。
- 配置 Profile 結構的參數:
- ○ Profile.RangingProfile 設置為中距離多目標測距模式。 ○ Profile.TimingBudget 設置測量時間預算。
- ○ Profile.Frequency 設置為0,不用于正常測距。 ○ Profile.EnableAmbient 啟用環境光測量。
- ○ Profile.EnableSignal 啟用信號測量。
- CUSTOM_RANGING_SENSOR_ConfigProfile(CUSTOM_VL53L1CB, &Profile);:
- ○ 如果配置文件與默認配置不同,則應用新的配置文件。
- CUSTOM_RANGING_SENSOR_Start(CUSTOM_VL53L1CB, RS_MODE_BLOCKING_CONTINUOUS);: ○ 啟動傳感器,設置為阻塞連續測量模式。
- while (1) 循環:
- ○ 在無限循環中,定期讀取傳感器的距離數據。
- ○ 如果成功讀取距離數據,則調用 print_result(&Result) 打印結果。
- ○ 使用 HAL_Delay(POLLING_PERIOD) 延遲一段時間,以控制輪詢頻率。
在main.c種添加頭文件。
/* USER CODE BEGIN Includes */
#include "app_tof.h"
#include "custom_ranging_sensor.h"
/* USER CODE END Includes */
添加對應變量。
/* USER CODE BEGIN 0 */
#define TIMING_BUDGET (200U) /* 16 ms < TimingBudget < 500 ms */
#define POLLING_PERIOD (250U) /* refresh rate for polling mode (ms, shall be consistent with TimingBudget value) */
static RANGING_SENSOR_Capabilities_t Cap;
static RANGING_SENSOR_ProfileConfig_t Profile;
static RANGING_SENSOR_Result_t Result;
static int32_t status = 0;
static void print_result(RANGING_SENSOR_Result_t *Result);
static int32_t decimal_part(float_t x);
/* USER CODE END 0 */
測量頻率修改
增加計時預算會增加單次測量發射的光子數量。這提高了測量精度和最大測距距離。 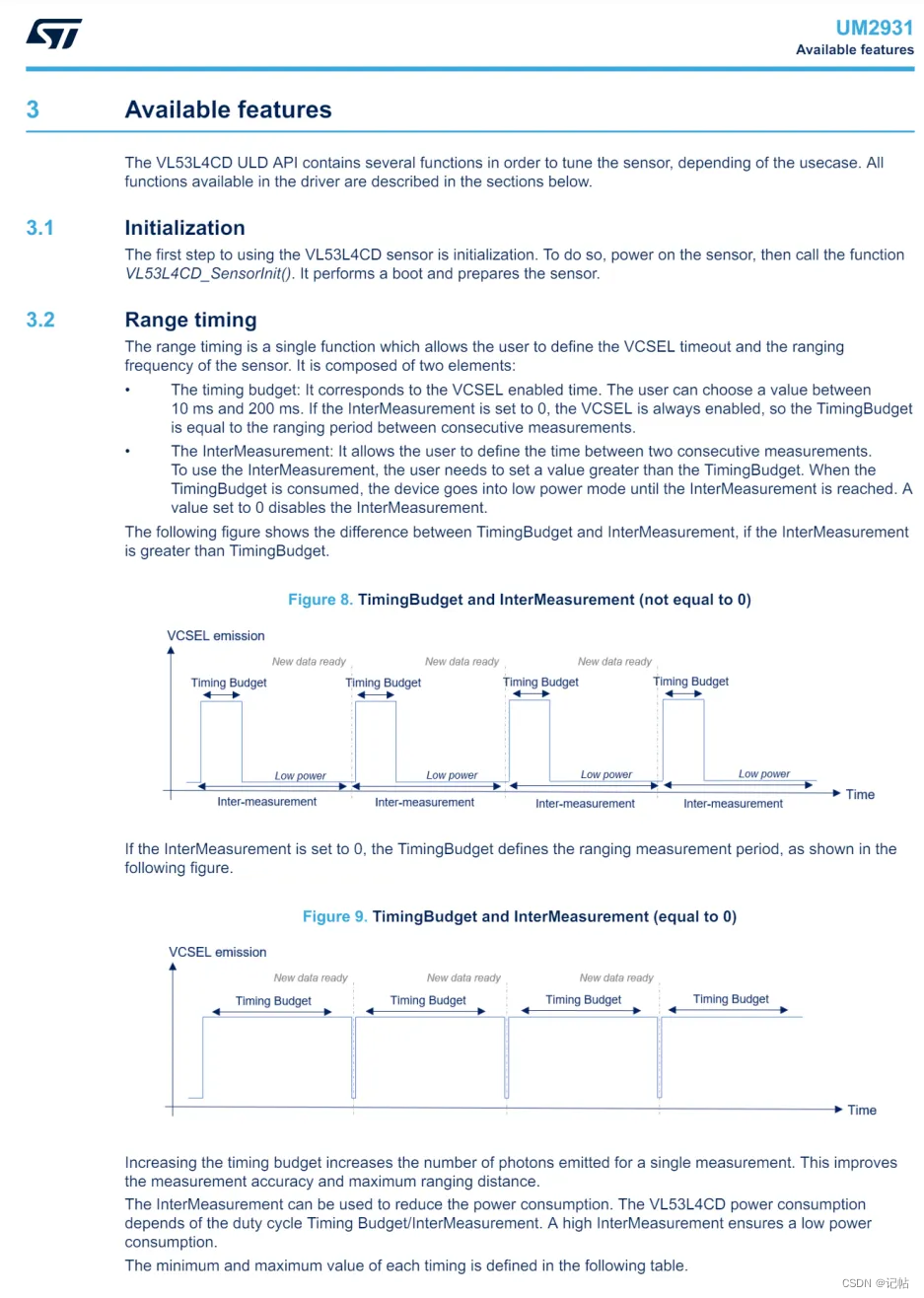
Profile.TimingBudget 設置測量時間預算,初始化代碼如下所示,TIMING_BUDGET設置為200ms。
/* USER CODE BEGIN 2 */
uint32_t Id;
// 讀取傳感器ID
CUSTOM_RANGING_SENSOR_ReadID(CUSTOM_VL53L1CB, &Id);
// 獲取傳感器的能力
CUSTOM_RANGING_SENSOR_GetCapabilities(CUSTOM_VL53L1CB, &Cap);
// 配置測距參數
Profile.RangingProfile = RS_MULTI_TARGET_MEDIUM_RANGE; // 設置測距模式為中距離
Profile.TimingBudget = TIMING_BUDGET; // 設置時間預算(測量時間)
Profile.Frequency = 0; // 設置測量頻率,這里不用于正常測距(設為0)
Profile.EnableAmbient = 1; // 啟用環境光測量(1:啟用,0:禁用)
Profile.EnableSignal = 1; // 啟用信號測量(1:啟用,0:禁用)
// 如果配置文件與默認配置不同,則設置新的配置文件
CUSTOM_RANGING_SENSOR_ConfigProfile(CUSTOM_VL53L1CB, &Profile);
// 啟動傳感器,設置為短距離測量模式
status = CUSTOM_RANGING_SENSOR_Start(CUSTOM_VL53L1CB, RS_MODE_BLOCKING_CONTINUOUS);
/* USER CODE END 2 */
主程序如下所示,可以通過判斷GPIO1來判定信號是否已經準備好。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(HAL_GPIO_ReadPin ( GPIOB, GPIO_PIN_8) ==0)
{
/* polling mode */
status = CUSTOM_RANGING_SENSOR_GetDistance(CUSTOM_VL53L1CB, &Result);
if (status == BSP_ERROR_NONE)
{
print_result(&Result);
}
}
/* USER CODE END WHILE */
// MX_TOF_Process();
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
若無法正常打印,需要修改堆棧。

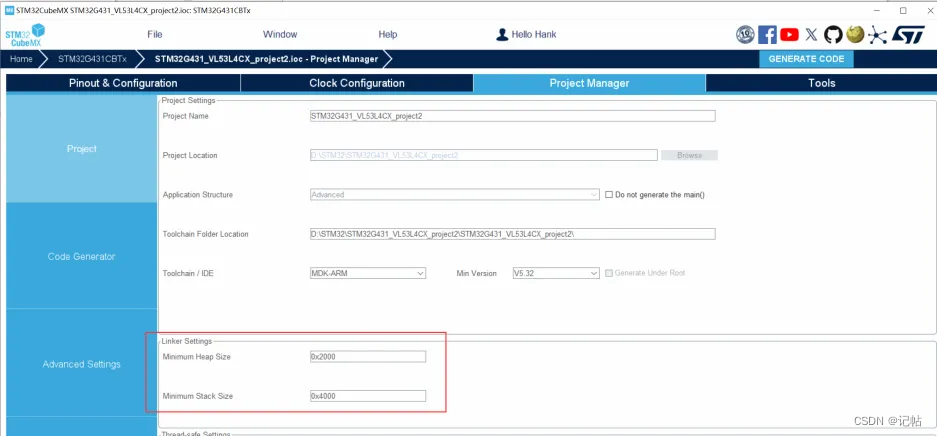
此時時間為200ms輸出一次,頻率為5Hz。

修改TIMING_BUDGET為20,此時為20ms刷新一次,頻率為50Hz,此時數據抖動較大。

修改測距范圍
VL53L1CB最大可以測量4M+距離,可以通過 Profile.RangingProfile 設置為測距模式。
- RS_MULTI_TARGET_SHORT_RANGE (VL53L1CB_PROFILE_SHORT):
- ○ 短距離多目標模式:
- ■ 此模式下,傳感器優化用于較近距離的測量。
- ■ 適用于需要高精度但測量距離較短的應用。
- ■ 在短距離測量時,傳感器可以提供更快的響應時間和更高的測量頻率。
- ○ 短距離多目標模式:
- RS_MULTI_TARGET_MEDIUM_RANGE (VL53L1CB_PROFILE_MEDIUM):
- ○ 中距離多目標模式:
- ■ 此模式下,傳感器在中等距離范圍內工作。
- ■ 適用于需要在中等距離內進行測量的應用。
- ■ 提供了距離和精度之間的平衡。
- ○ 中距離多目標模式:
- RS_MULTI_TARGET_LONG_RANGE (VL53L1CB_PROFILE_LONG):
- ○ 長距離多目標模式:
- ■ 此模式下,傳感器優化用于較遠距離的測量。
- ■ 適用于需要測量更遠距離的應用。
- ■ 在長距離測量時,響應時間可能會更長,但可以覆蓋更大的測量范圍。
- ○ 長距離多目標模式:
此時 Profile.RangingProfile = VL53L1CB_PROFILE_MEDIUM; // 設置測距模式為中距離
若測量長距離,可能出現如下測量失敗情況,TIMING_BUDGET修改為200。

Status狀態位如下所示。
在使用VL53L1CB傳感器時,返回的狀態碼(status)為4通常表示特定的錯誤類型。根據VL53L1CB傳感器的文檔,狀態碼4對應的具體錯誤類型是 VL53L1CB_RANGESTATUS_OUTOFBOUNDS_FAIL。
VL53L1CB_RANGESTATUS_OUTOFBOUNDS_FAIL:
● 狀態碼4:此狀態碼表示測距過程中發生了超出邊界失敗(out of bounds fail)的錯誤。
● 含義:傳感器在測量過程中檢測到目標物體距離超出了其測量范圍,或者接收到的信號不在預期的范圍內。

修改測量范圍為長范圍。
Profile.RangingProfile = RS_MULTI_TARGET_LONG_RANGE;
此時測距可以測量長距離范圍。

審核編輯 黃宇
-
傳感器
+關注
關注
2576文章
55021瀏覽量
791216 -
TOF
+關注
關注
9文章
544瀏覽量
38467 -
stm32cubemx
+關注
關注
5文章
290瀏覽量
17357
發布評論請先 登錄
STM32H5開發VL53L8CX(1)----驅動TOF進行區域檢測
VL53L8CX小板開發(4)----運動指示器

VL53L8CX小板開發(3)----檢測閾值
VL53L8CX小板開發(1)----驅動TOF進行區域檢測
VL53L4CX小板開發(2)----修改測距范圍及測量頻率
VL53L4CX小板開發(1)----驅動TOF進行測距

VL53L4CD小板開發(2)----修改測量頻率
ST VL53L4CD 飛行時間測距模組技術解析與應用指南
基于VL53L4CX的飛行時間傳感器擴展板:X-NUCLEO-53L4A2技術解析
基于VL53L4CD的高精度ToF接近傳感器擴展板:X-NUCLEO-53L4A1 技術解析
基于VL53L4ED ToF傳感器的SATEL-VL53L4ED分線板技術解析與應用指南

請問VL53L4CXV0DH/1,這一顆tof, 是否支持100赫茲的測量頻率?
小安派BW21-CBV-Kit入門教程之讀取VL53L0X紅外測距傳感器數據



 工商網監
工商網監
評論