 VL53L4CX小板開發(1)----驅動TOF進行測距
VL53L4CX小板開發(1)----驅動TOF進行測距

概述
VL53L4CX 是一款先進的激光距離傳感器,專為長距離和多目標測量設計,能夠在最長6米的范圍內提供非常精確的距離測量,尤其在短距離上效果顯著,這得益于新一代18°視場角的激光發射器和出色的環境光性能。
得益于ST的專利算法和創新的模塊結構,VL53L4CX還能在視場范圍內檢測到多個物體,并理解深度信息。ST的直方圖算法確保了超過80厘米的距離覆蓋玻璃的串擾免疫,并對80厘米以下的目標提供動態污漬補償。
最近在弄ST Demo,需要樣片的可以加群申請:615061293 。
視頻教學
[https://www.bilibili.com/video/BV1RkBRYjEu6/]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
完整代碼下載
[https://download.csdn.net/download/qq_24312945/90228592]
主要特點
快速,精確測距
- 基于直方圖技術
- 測量距離0mm - 6m
- 線性短距離低至10 mm
- 在所有亮度等級下對所有目標的遠程測距性能有重大改進
- 18°視野(FoV)
- 多目標檢測能力
- 距離超過80cm的目標不受蓋片玻璃和污跡造成的串擾影響
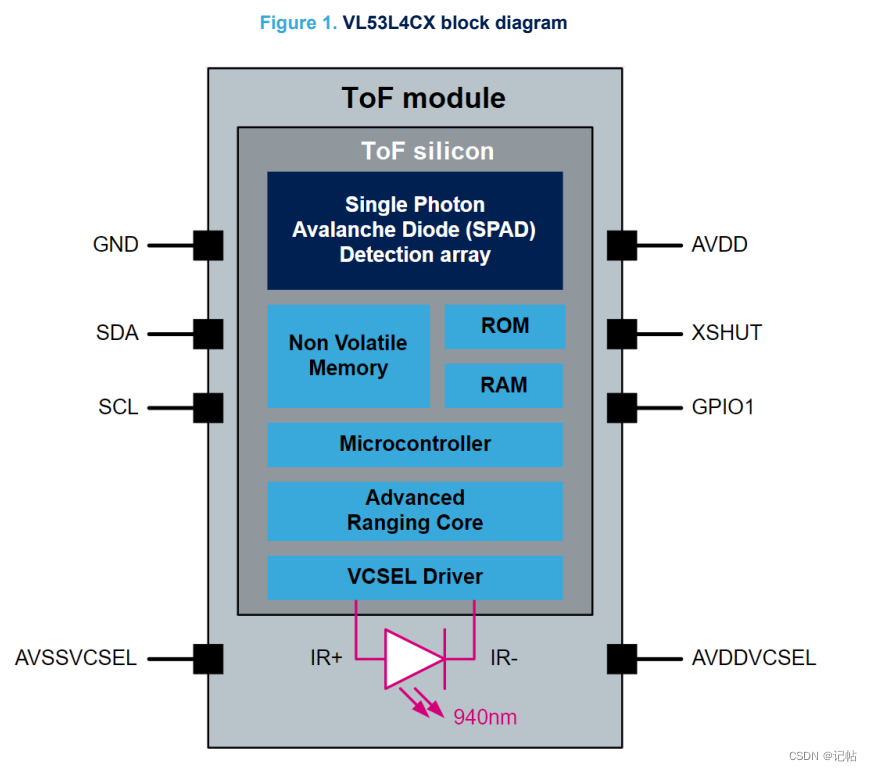
VL53L4CX是完全集成的小型化模塊
- 發射器:940 nm不可見激光(VCSEL)及其模擬驅動器
- 運行高級數字固件的低功耗微控制器
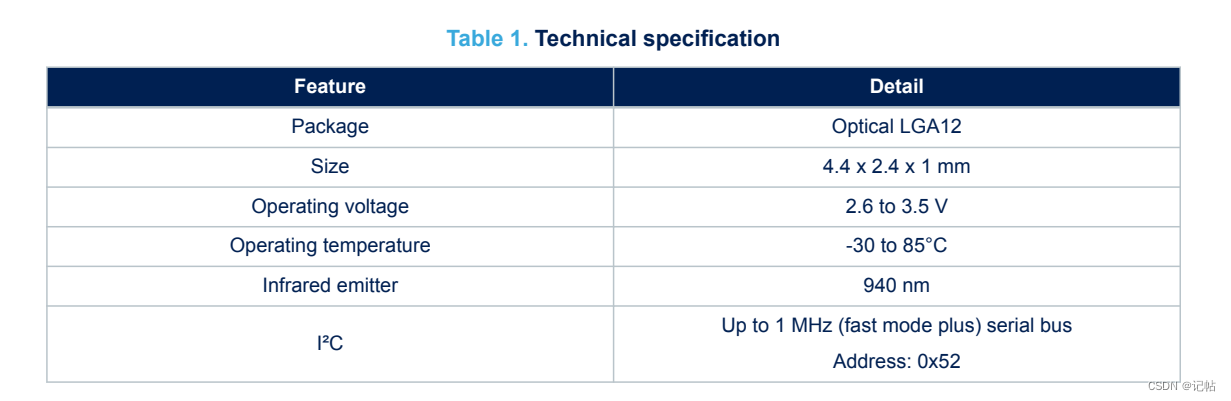
- 尺寸:4.4 x 2.4 x 1 mm
- 與VL53L0X、VL53L1X、VL53L1CB、VL53L3CX和VL53L4CD引腳兼容

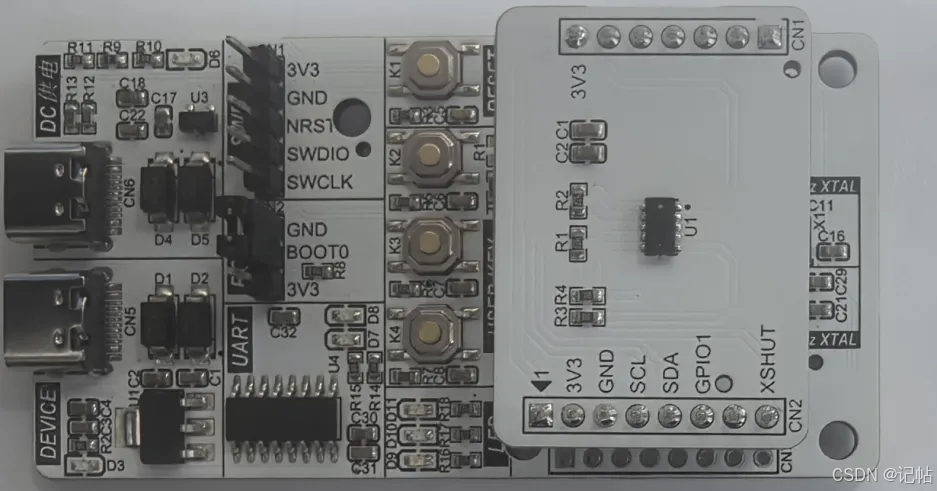
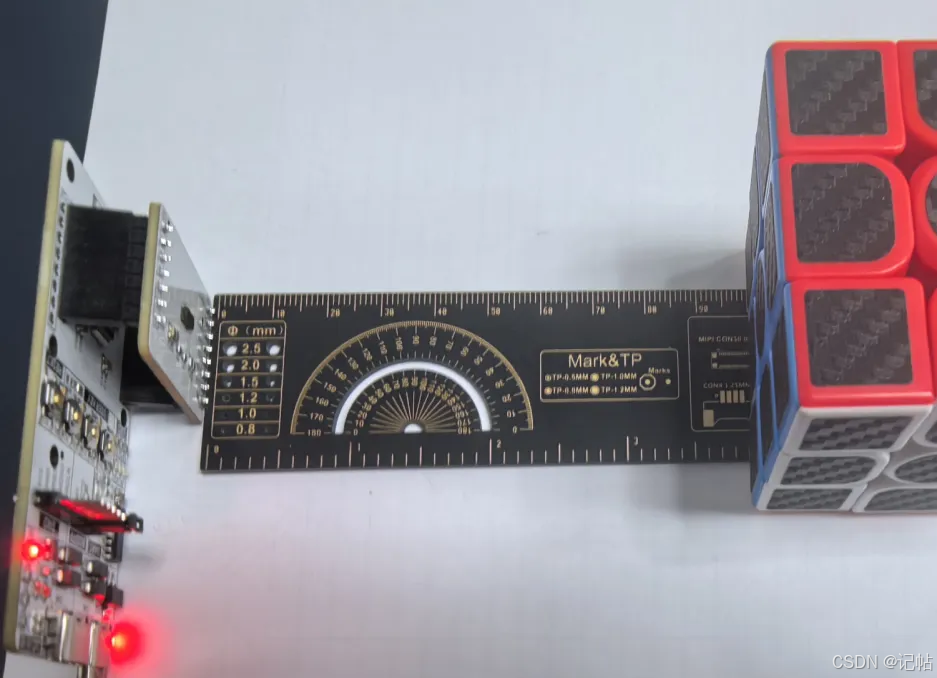
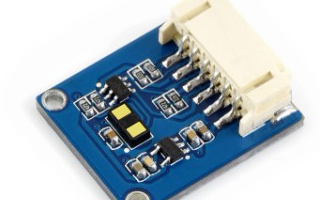
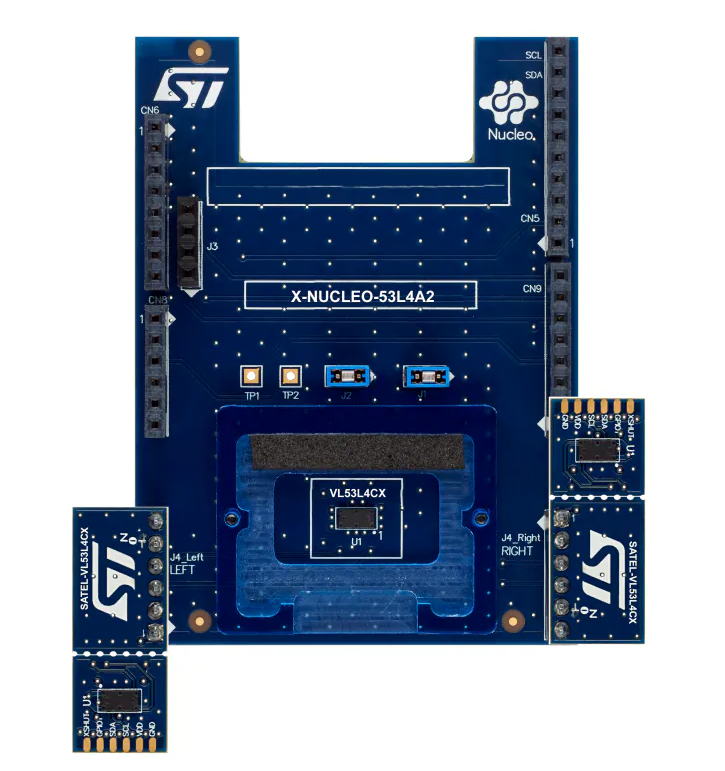
硬件準備
首先需要準備一個開發板,這里我準備的是自己繪制的開發板,需要的可以進行申請。
主控為STM32H503CBT6,TOF為VL53L4CX
技術規格
系統框圖
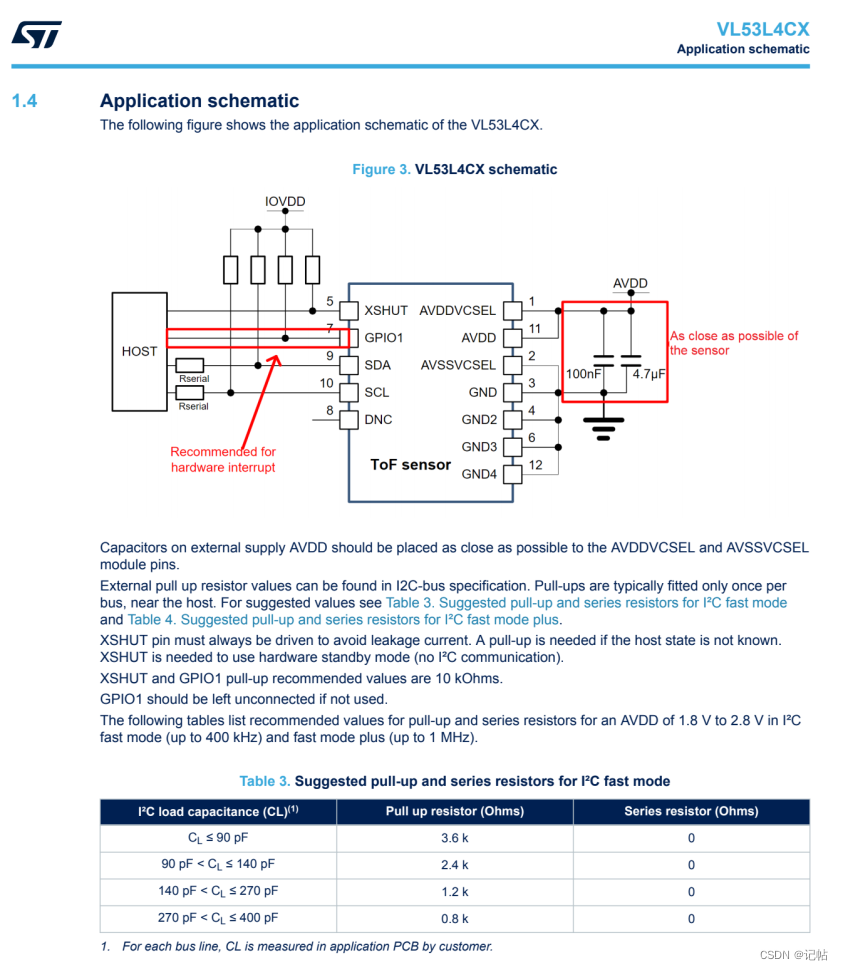
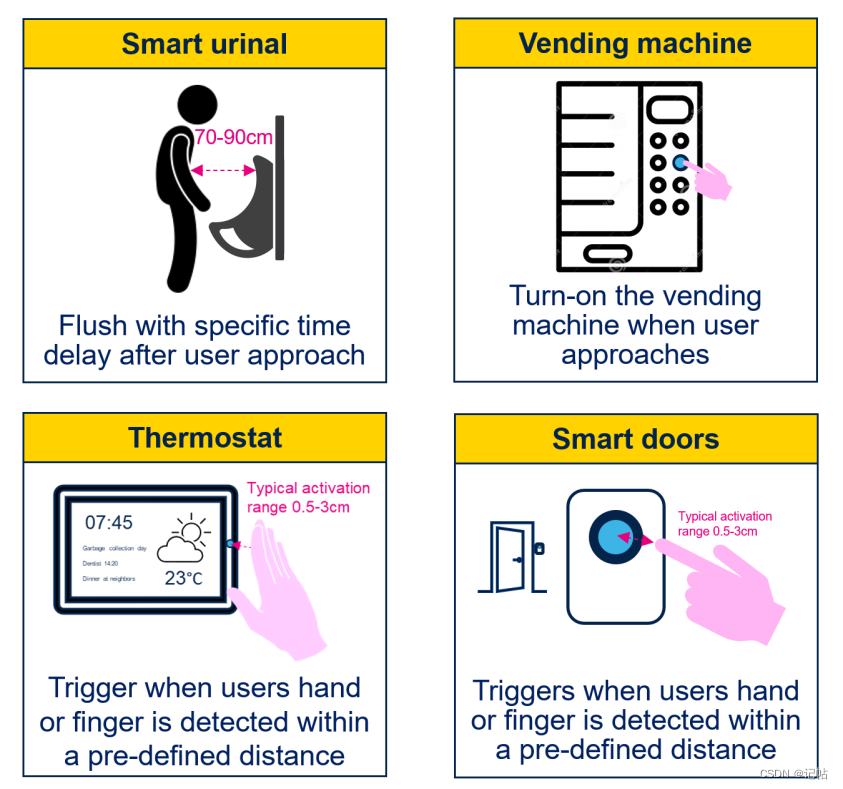
應用示意圖
參考程序
[https://github.com/CoreMaker-lab/VL53L4CX]
[https://gitee.com/CoreMaker/VL53L4CX]
生成STM32CUBEMX
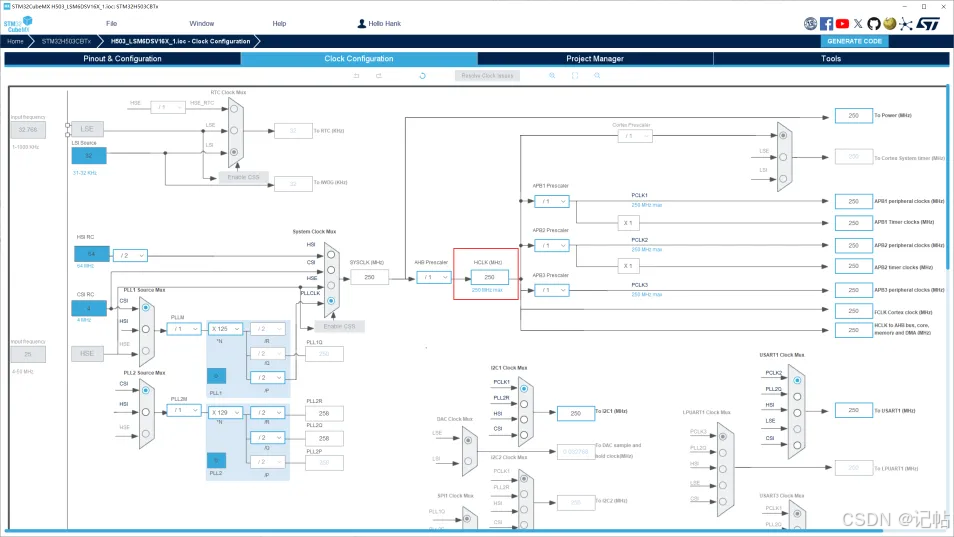
用STM32CUBEMX生成例程,這里使用MCU為STM32H503CB。 配置時鐘樹,配置時鐘為250M。
串口配置
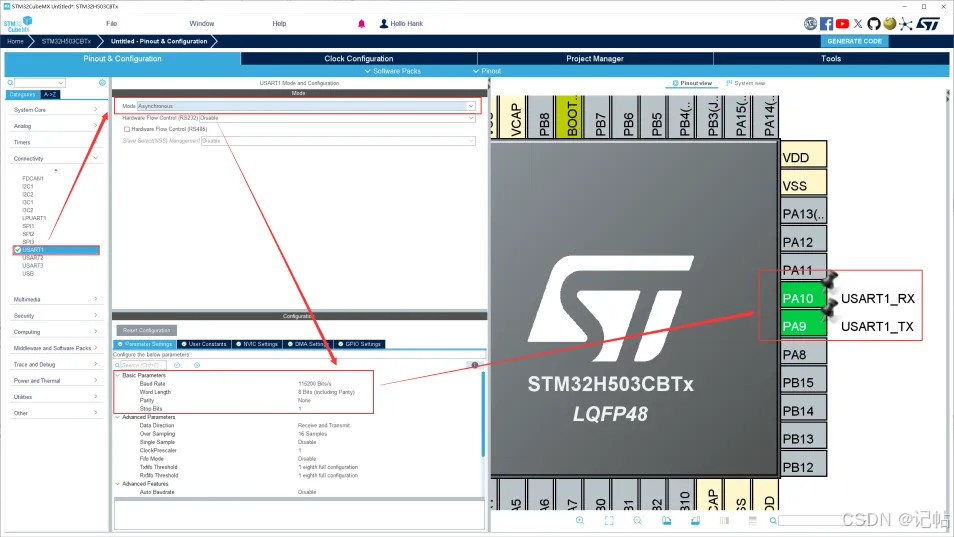
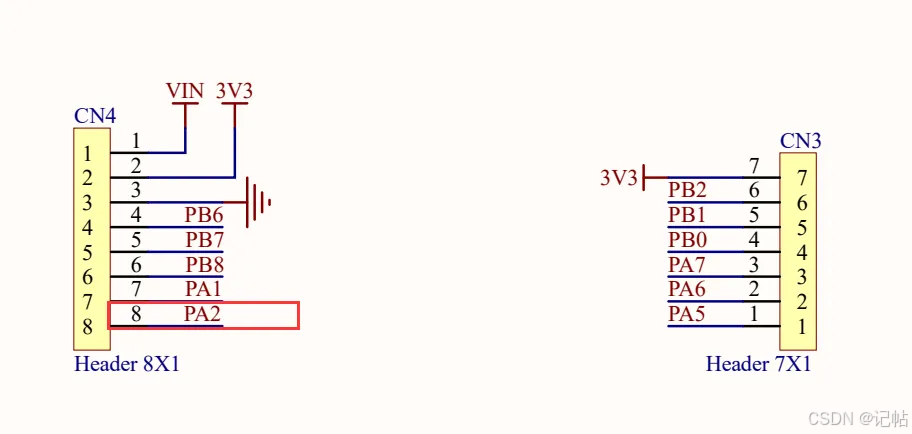
查看原理圖,PA9和PA10設置為開發板的串口。
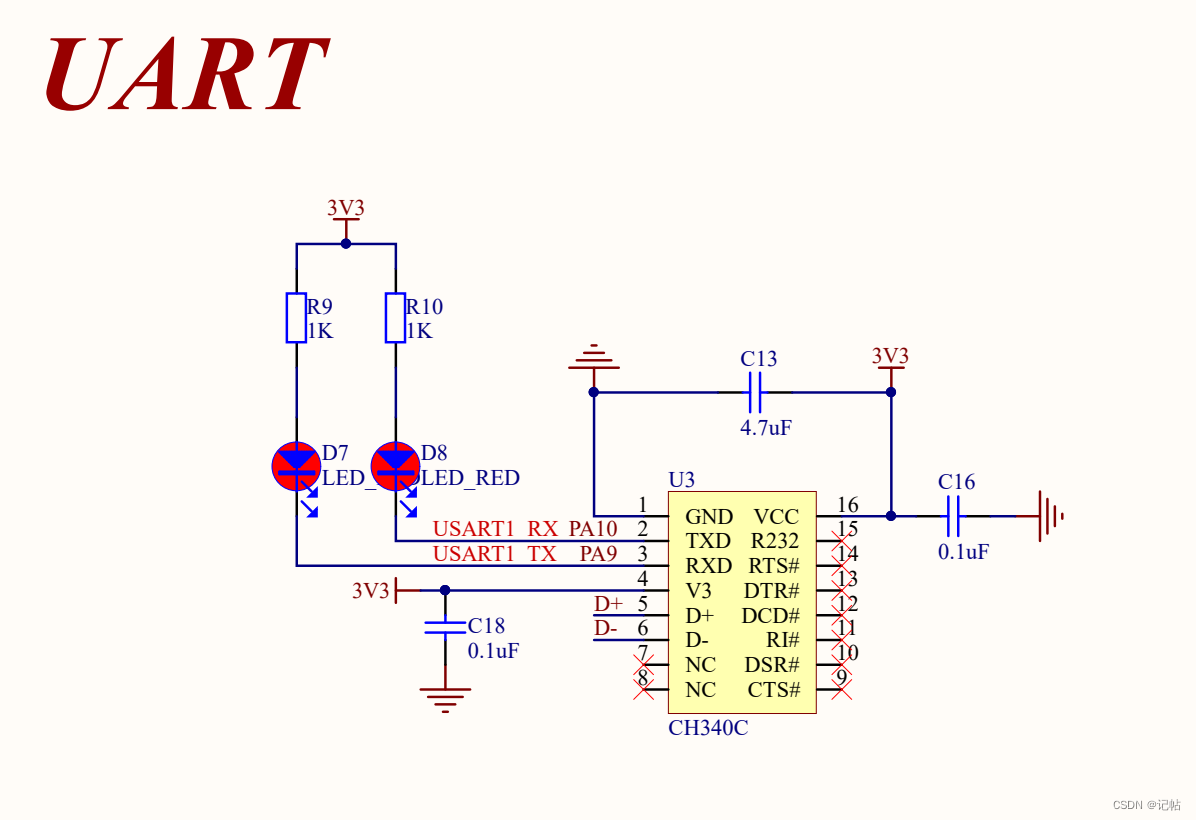
配置串口,速率為115200。
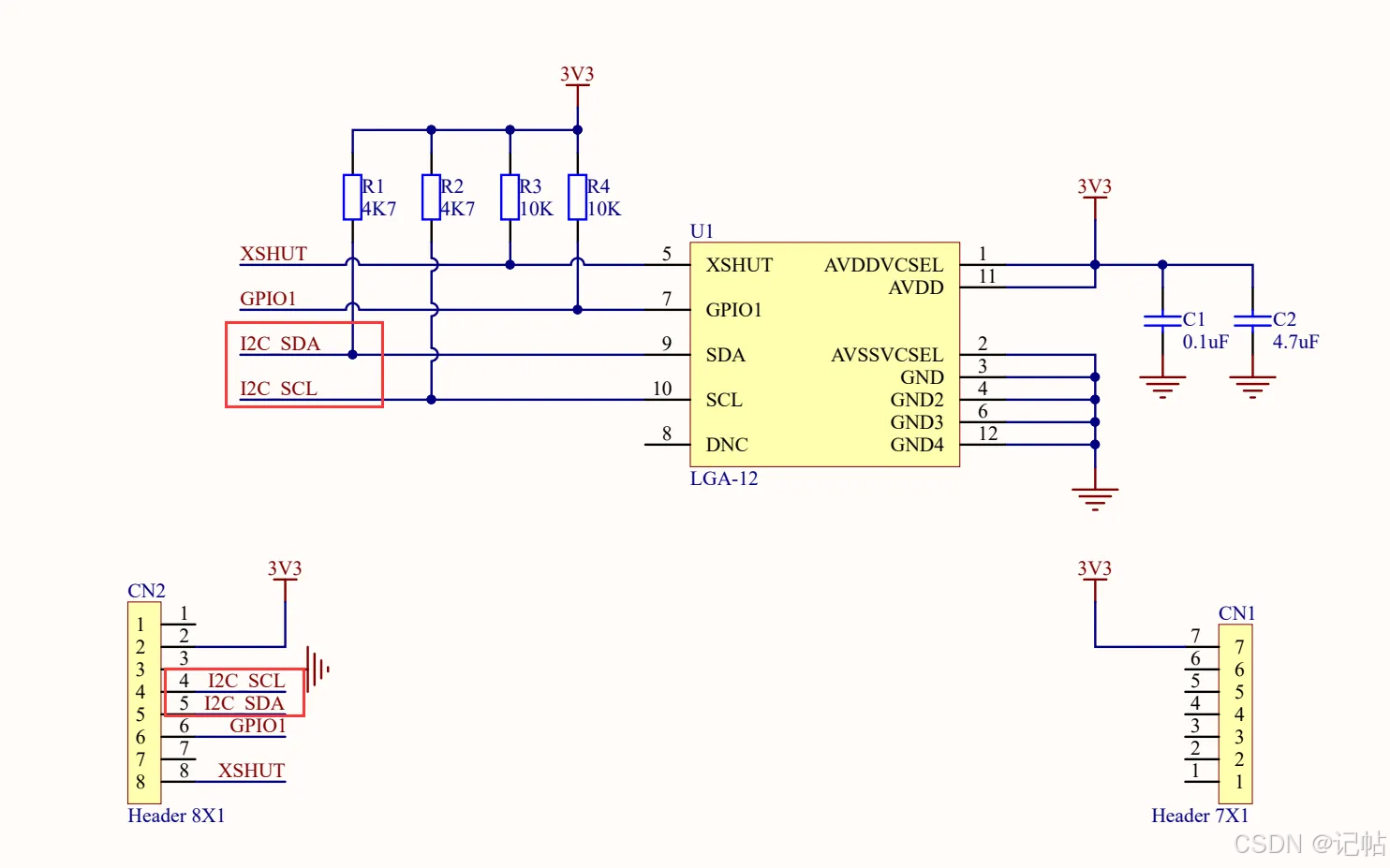
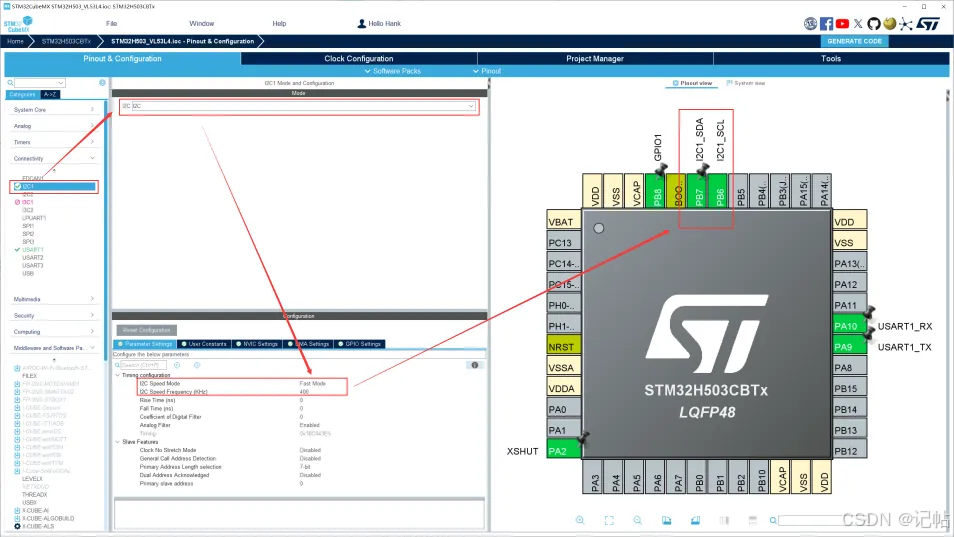
IIC配置
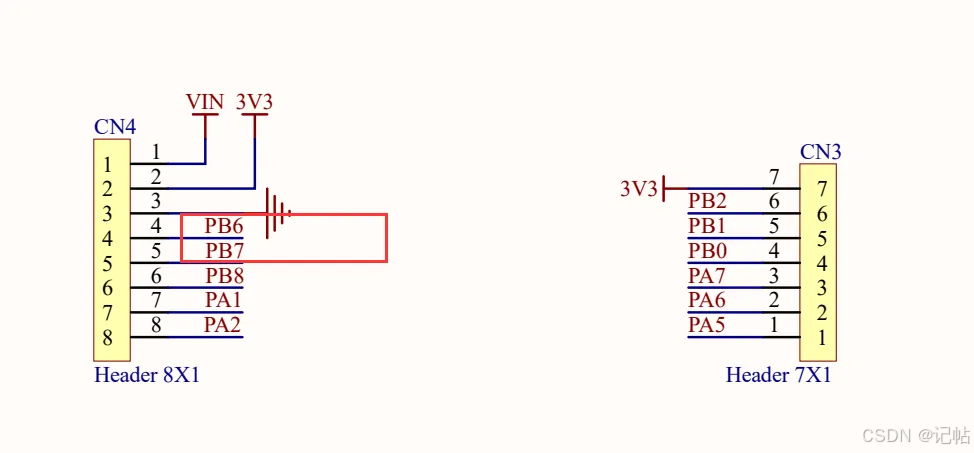
在這個應用中,VL53L4CD模塊通過I2C(IIC)接口與主控器通信。具體來說,VL53L4CD模塊的I2C引腳連接到主控器的PB6和PB7兩個IO口。
配置IIC為快速模式,速度為400k。
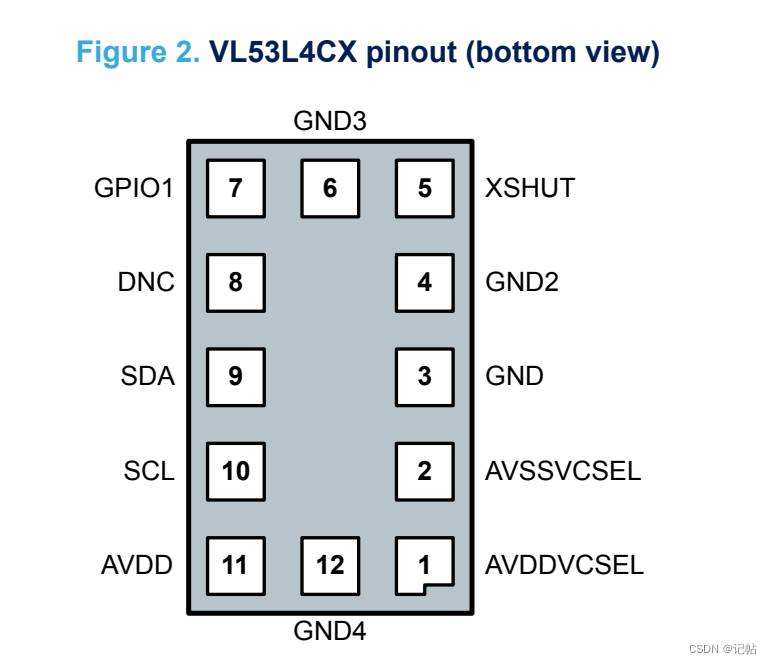
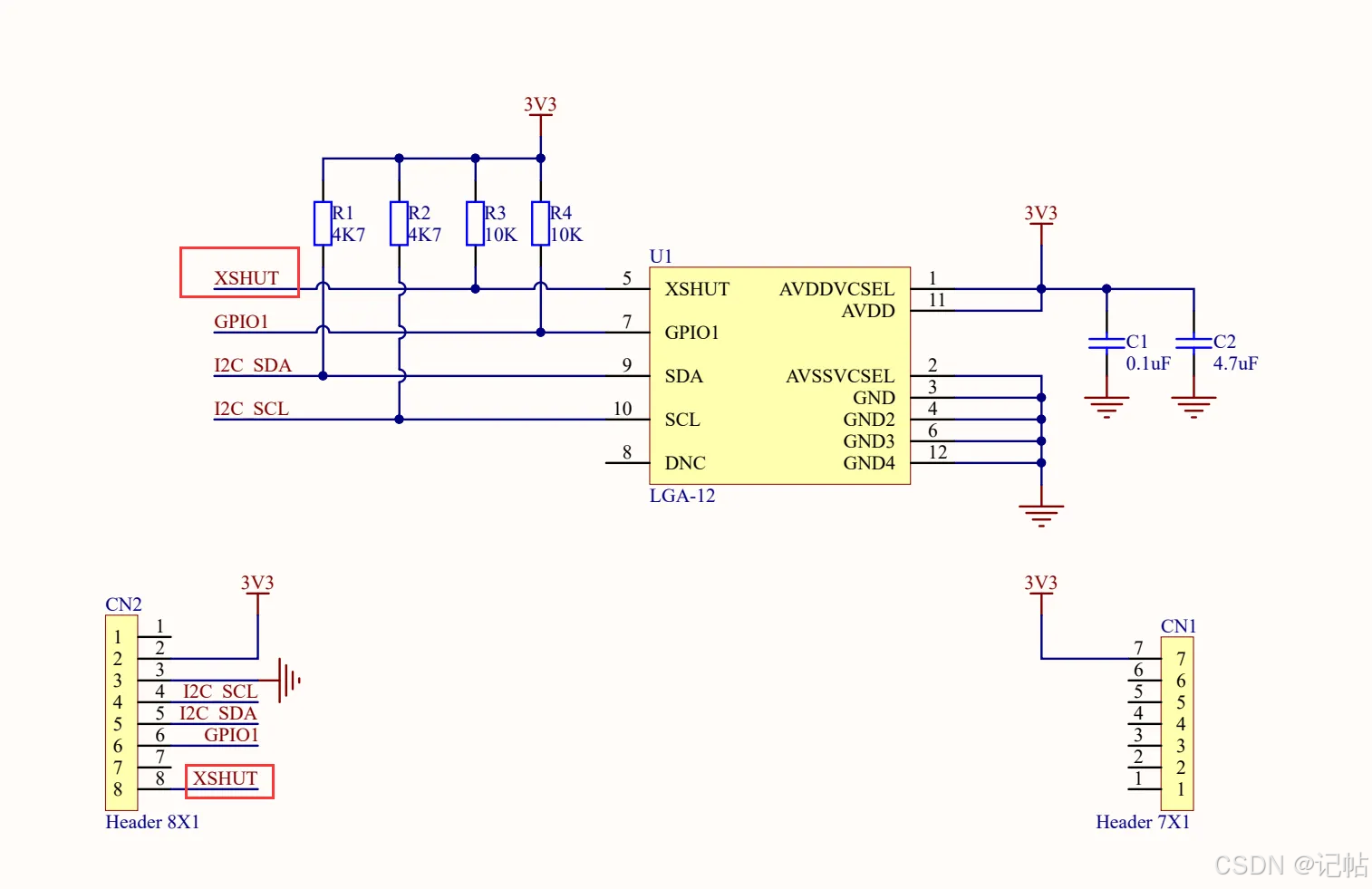
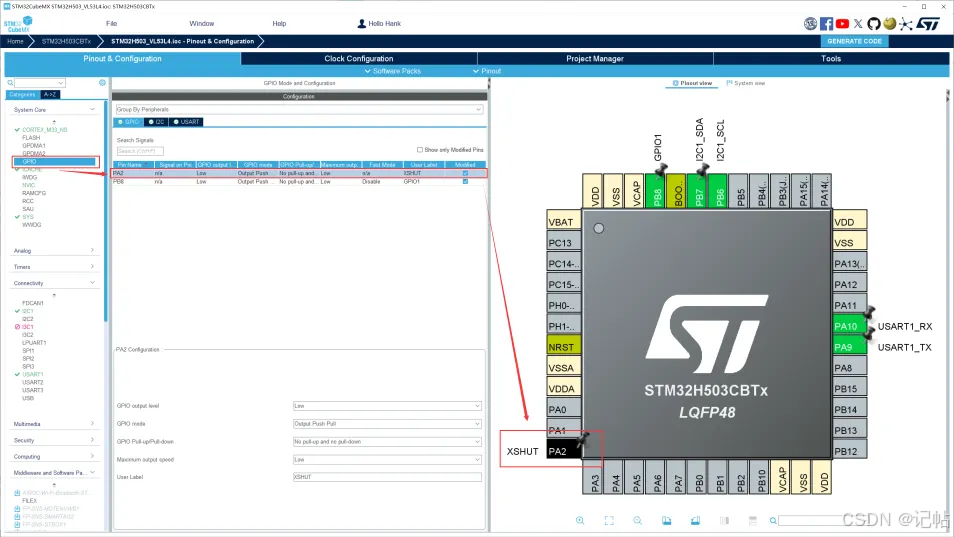
XSHUT
XSHUT引腳是由主機連接和控制的,這種設計優化了功耗,因為設備在不使用時可以被完全關閉,然后通過主機使用XSHUT引腳來喚醒。當AVDD存在且XSHUT為低電平時,設備處于硬件待機模式(HW Standby mode)。如果XSHUT引腳不由主機控制,而是通過上拉電阻連接到AVDD,那么設備在固件啟動(FW BOOT)后會自動進入軟件待機(SW STANDBY),而不會進入硬件待機。
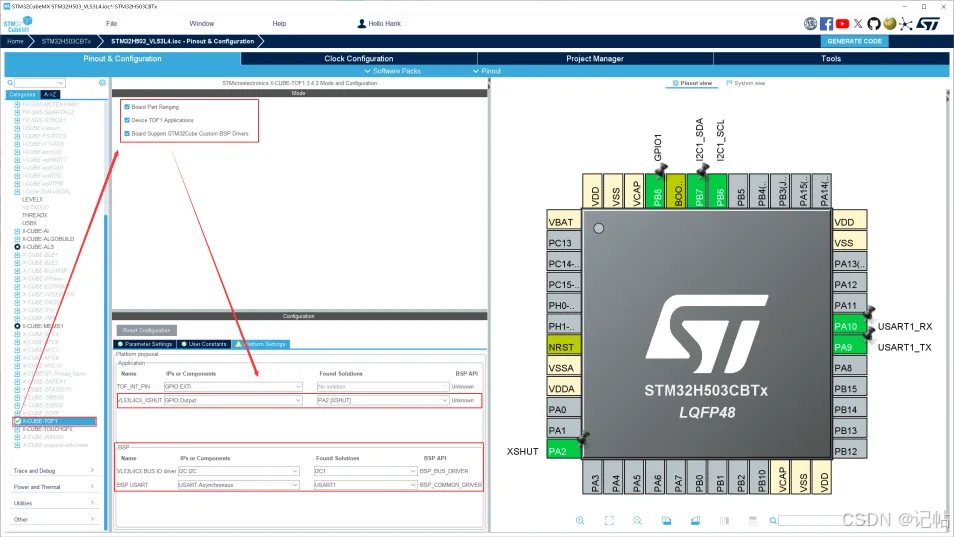
X-CUBE-TOF1
本節介紹在不需要使用樣例應用時如何使用STM32CubeMX將X-CUBE-TOF1軟件包添加到項目中。有了這樣的設置,就只配置了驅動層。
堆棧設置
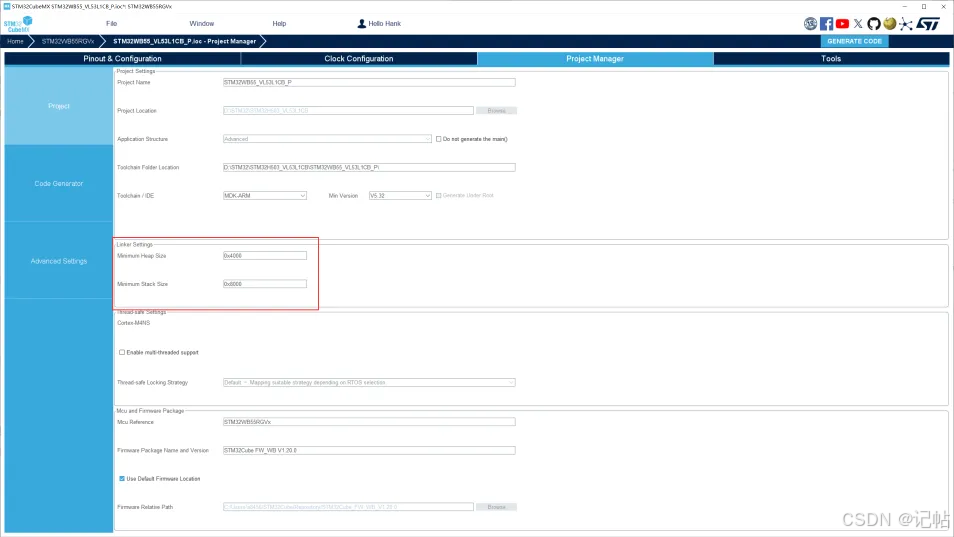
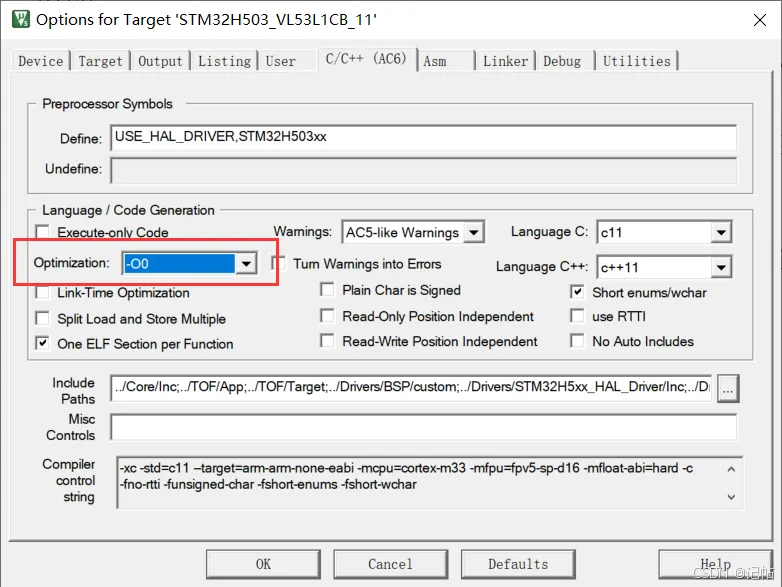
若無法正常運行需要修改優化等級。
串口重定向
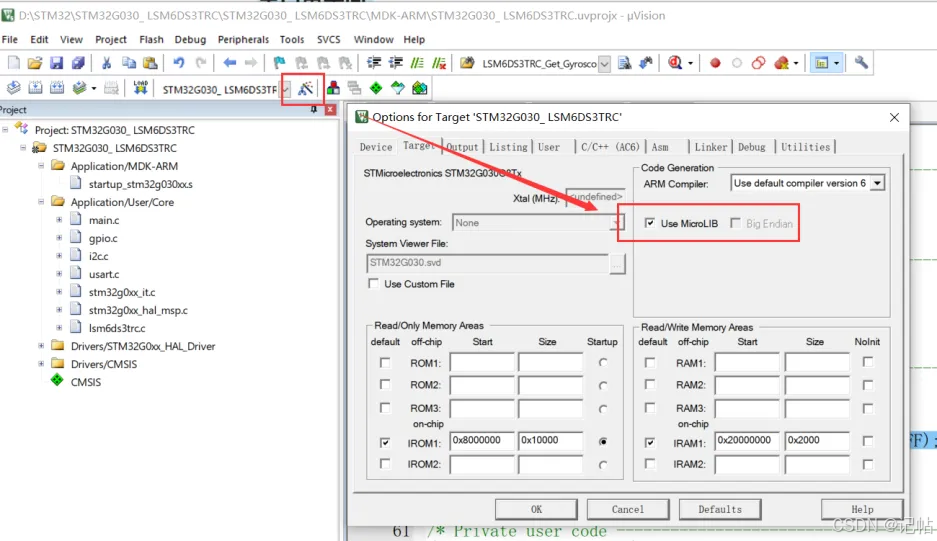
打開魔術棒,勾選MicroLIB
演示結果
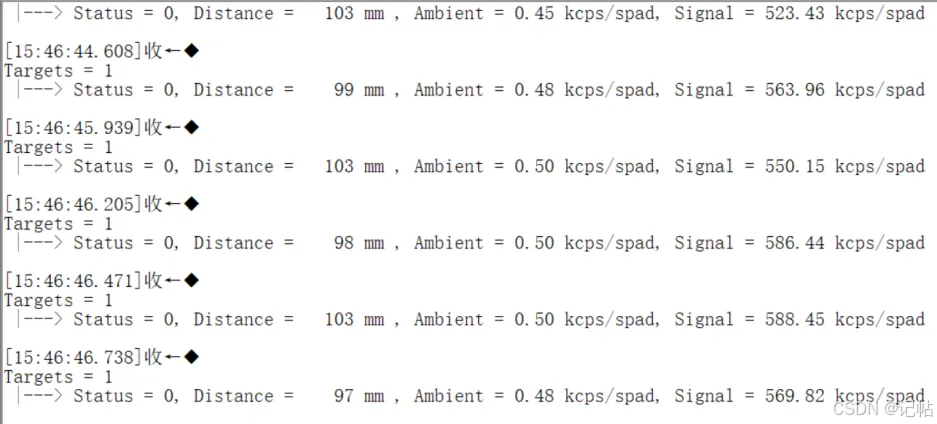
-
微控制器
+關注
關注
48文章
8504瀏覽量
165101 -
傳感器
+關注
關注
2577文章
55259瀏覽量
792824 -
TOF
+關注
關注
9文章
545瀏覽量
38588
發布評論請先 登錄
VL53L5CX驅動開發(1)----驅動TOF進行區域檢測
VL53L4CD TOF開發(1)----驅動TOF進行測距
VL53L8CX TOF開發(1)----驅動TOF進行區域檢測
VL53L1CB TOF開發(1)----驅動TOF進行測距

VL53L8CX小板開發(4)----運動指示器

VL53L5CX #高達 8x8 多區域測距和 63°對角線寬視場 飛行時間多區域測距傳感器
微雪電子VL53L1X測距傳感器4米VL53L1X測距模塊簡介
VL53L4CX TOF開發(1)----驅動TOF進行測距
VL53L4CX TOF開發(2)----修改測距范圍及測量頻率
VL53L4CD液位監測(1)----驅動TOF進行測距
VL53L4CX飛行時間傳感器技術解析與應用實踐

基于VL53L4CX的飛行時間傳感器擴展板:X-NUCLEO-53L4A2技術解析
VL53L4CX小板開發(2)----修改測距范圍及測量頻率
VL53L8CX小板開發(1)----驅動TOF進行區域檢測
STM32H5開發VL53L8CX(1)----驅動TOF進行區域檢測



 工商網監
工商網監
評論