") Delta并聯(lián)機(jī)器人高速抓放應(yīng)用解決方案:基于BL350與EtherCAT的硬實(shí)時(shí)控制
Delta并聯(lián)機(jī)器人高速抓放應(yīng)用解決方案:基于BL350與EtherCAT的硬實(shí)時(shí)控制

在食品、藥品、電子元器件等行業(yè)的包裝與分揀產(chǎn)線上,Delta并聯(lián)機(jī)器人(又稱“蜘蛛手”)因其高速度、高重復(fù)定位精度,已成為實(shí)現(xiàn)高效抓放作業(yè)的核心裝備。然而,隨著生產(chǎn)節(jié)拍要求的不斷提升(如每分鐘抓取數(shù)百次),以及產(chǎn)品換型日益頻繁,傳統(tǒng)的控制系統(tǒng)在實(shí)時(shí)響應(yīng)、精準(zhǔn)同步和快速部署方面面臨嚴(yán)峻挑戰(zhàn)。本文將詳細(xì)介紹一種基于鋇錸技術(shù)ARMxy BL350系列嵌入式工業(yè)計(jì)算機(jī),并結(jié)合IGH EtherCAT主站與模塊化IO系統(tǒng)的Delta機(jī)器人高速高精控制解決方案。
一、Delta機(jī)器人高速抓放應(yīng)用的核心痛點(diǎn)
1.極致實(shí)時(shí)性要求難以滿足:Delta機(jī)器人每分鐘數(shù)百次的抓取節(jié)拍,要求運(yùn)動(dòng)控制的循環(huán)周期必須低于500μs。傳統(tǒng)PLC或基于標(biāo)準(zhǔn)以太網(wǎng)的通信方式,其通信抖動(dòng)和循環(huán)周期通常在毫秒級(jí),無法滿足此等苛刻的確定性實(shí)時(shí)要求,導(dǎo)致機(jī)器人無法發(fā)揮其最高性能。
2.視覺系統(tǒng)與機(jī)器人動(dòng)作的精準(zhǔn)同步:機(jī)器人需要根據(jù)視覺系統(tǒng)識(shí)別出的物品位置和角度,實(shí)時(shí)調(diào)整抓取軌跡。若視覺觸發(fā)信號(hào)接收不及時(shí),或坐標(biāo)映射轉(zhuǎn)換耗時(shí)過長,會(huì)直接導(dǎo)致抓取失敗或物品被撞飛。傳統(tǒng)方案中,視覺PC與機(jī)器人控制器之間的通信延遲是主要瓶頸之一。
3.負(fù)載變化對動(dòng)態(tài)性能的干擾:在生產(chǎn)中,抓取的工件重量可能存在波動(dòng)。這種可變負(fù)載會(huì)顯著影響機(jī)器人的動(dòng)力學(xué)特性,若控制模型未能及時(shí)調(diào)整,可能導(dǎo)致軌跡跟蹤誤差增大、執(zhí)行器力矩飽和,甚至引發(fā)振動(dòng)。
4.系統(tǒng)集成與調(diào)試復(fù)雜:運(yùn)動(dòng)控制器、IO模塊、視覺系統(tǒng)等往往來自不同供應(yīng)商,集成調(diào)試工作量大,特別是視覺坐標(biāo)系與機(jī)器人坐標(biāo)系之間的手眼標(biāo)定和映射邏輯配置,通常需要專業(yè)知識(shí)和大量時(shí)間,拖慢整體部署進(jìn)度。
二、解決方案概述:BL350 + EtherCAT 硬實(shí)時(shí)平臺(tái)
本方案以鋇錸技術(shù)ARMxy BL350系列作為Delta機(jī)器人的“大腦”,構(gòu)建一個(gè)高度集成、響應(yīng)迅捷的智能控制平臺(tái)。
核心控制器:ARMxy BL350系列,基于TI Sitara AM62x多核處理器(如AM6254),集成ARM Cortex-A53應(yīng)用處理器與Cortex-M4F實(shí)時(shí)協(xié)處理器。
實(shí)時(shí)系統(tǒng):搭載Linux-RT-5.10.168實(shí)時(shí)內(nèi)核,確保任務(wù)調(diào)度的確定性。
EtherCAT主站:穩(wěn)定運(yùn)行IGH EtherCAT主站,實(shí)現(xiàn)小于500μs的通信周期和納秒級(jí)的同步精度,輕松驅(qū)動(dòng)伺服軸和IO。
軟件賦能:利用QuickConfig工具的AI輔助功能,可自動(dòng)化或半自動(dòng)化地完成視覺坐標(biāo)到機(jī)器人坐標(biāo)的映射邏輯配置,極大簡化調(diào)試流程。通過BLRAT工具可實(shí)現(xiàn)遠(yuǎn)程運(yùn)維與參數(shù)優(yōu)化。
三、具體IO需求與選型配置
1. 核心控制單元選型
主控:BL352A(3個(gè)EtherCAT網(wǎng)口,1個(gè)X板槽,支持HDMI)
SOM:SOM353(AM6254, 4x Cortex-A53 @1.4GHz, Cortex-M4F, 8GB eMMC, 2GB DDR4)
實(shí)時(shí)保障:Linux-RT-5.10.168 + IGH EtherCAT主站,通信周期配置為500μs。
2. EtherCAT網(wǎng)絡(luò)規(guī)劃
一個(gè)EtherCAT端口連接3或4臺(tái)支持EtherCAT的伺服驅(qū)動(dòng)器,分別控制機(jī)器人的三個(gè)主動(dòng)臂。
另一個(gè)EtherCAT端口可連接EtherCAT分布式IO模塊,擴(kuò)展額外的IO點(diǎn)(如安全門、氣壓檢測等)。
3. 關(guān)鍵IO選型與功能匹配:高速視覺觸發(fā)
功能模塊 信號(hào)需求 選型型號(hào) 功能說明
視覺觸發(fā)信號(hào)接收 4路高速數(shù)字輸入(DI) X14板 用于連接視覺系統(tǒng)發(fā)出的觸發(fā)信號(hào),其高速響應(yīng)特性確保機(jī)器 人能無延遲地獲取抓取指令。
選擇X14板(4路高速DI)的原因:其緊湊的6PIN設(shè)計(jì)與標(biāo)準(zhǔn)款外殼完美適配,專為處理高速數(shù)字輸入信號(hào)而優(yōu)化。在視覺系統(tǒng)識(shí)別到物品后,會(huì)立即向X14板發(fā)送一個(gè)脈沖信號(hào),BL350主控通過EtherCAT總線在下一個(gè)控制周期內(nèi)即可獲取此信號(hào),并即刻啟動(dòng)逆運(yùn)動(dòng)學(xué)計(jì)算,規(guī)劃抓取軌跡。這種硬實(shí)時(shí)IO響應(yīng)是實(shí)現(xiàn)每分鐘數(shù)百次抓取的基礎(chǔ)。
4. 軟件賦能
QuickConfig的AI輔助標(biāo)定:通過圖形化界面引導(dǎo)用戶完成手眼標(biāo)定過程,并利用內(nèi)置算法智能學(xué)習(xí)視覺坐標(biāo)與機(jī)器人基坐標(biāo)之間的非線性映射關(guān)系,將原本繁瑣復(fù)雜的標(biāo)定流程簡化,部署效率提升超70%。
自適應(yīng)動(dòng)態(tài)規(guī)劃:結(jié)合Cortex-M4F實(shí)時(shí)核,可運(yùn)行負(fù)載觀測器算法,通過電機(jī)電流反饋實(shí)時(shí)估算負(fù)載變化,并動(dòng)態(tài)調(diào)整控制器的前饋參數(shù),有效抑制因負(fù)載波動(dòng)引起的跟蹤誤差和抖動(dòng)。
四、BL350邊緣IO模塊對比傳統(tǒng)IO模塊的優(yōu)勢
1.硬實(shí)時(shí)IO,助力極致節(jié)拍
傳統(tǒng)IO模塊通常采用現(xiàn)場總線(如PROFIBUS-DP、CC-Link)接入,其輪詢周期多在毫秒級(jí),且存在不可避免的通信抖動(dòng)。
BL350的X系列IO板直接通過主板內(nèi)部總線與CPU通信,延遲可達(dá)微秒級(jí),且確定性極高。X14板的高速DI能力,確保了視覺觸發(fā)信號(hào)的零丟失與超低延遲響應(yīng),為超高節(jié)拍生產(chǎn)提供了基礎(chǔ)保障。
2.高度集成,簡化系統(tǒng)架構(gòu)
傳統(tǒng)方案需要獨(dú)立的運(yùn)動(dòng)控制卡、EtherCAT主站、PLC(用于IO處理)和網(wǎng)關(guān)(用于視覺通信)。
BL350將EtherCAT主站、實(shí)時(shí)計(jì)算核心與模塊化IO集成于單一緊湊設(shè)備中。這不僅大幅節(jié)省控制柜空間,更消除了多層通信延遲,數(shù)據(jù)從視覺觸發(fā)到伺服驅(qū)動(dòng)的路徑更短,系統(tǒng)確定性更高。
3.模塊化靈活配置,精準(zhǔn)匹配需求
傳統(tǒng)的分布式IO模塊通常以固定點(diǎn)數(shù)(如16DI/16DO)的模塊為單位進(jìn)行擴(kuò)展,容易造成IO點(diǎn)浪費(fèi)。
BL350的X/Y板系統(tǒng)允許用戶根據(jù)實(shí)際需要的IO類型、數(shù)量和速度進(jìn)行精準(zhǔn)選配。在本方案中,僅需一張X14板即可滿足核心的高速DI需求,避免了為冗余功能付費(fèi),實(shí)現(xiàn)了成本與性能的最優(yōu)平衡。
4.開放的軟件生態(tài)與智能工具
基于標(biāo)準(zhǔn)的Linux-RT和開源IGH EtherCAT主站,開發(fā)者可以靈活調(diào)用底層資源。結(jié)合QuickConfig的AI輔助功能,極大降低了視覺集成和坐標(biāo)映射的技術(shù)門檻與調(diào)試時(shí)間。
內(nèi)置的BLIoTLink和BLRAT支持Modbus、MQTT、OPC UA等協(xié)議及遠(yuǎn)程訪問,能輕松將機(jī)器人運(yùn)行狀態(tài)、產(chǎn)量數(shù)據(jù)對接到MES系統(tǒng),并實(shí)現(xiàn)遠(yuǎn)程運(yùn)維。
五、總結(jié)與展望
鋇錸技術(shù)ARMxy BL350系列通過將強(qiáng)大的多核異構(gòu)計(jì)算能力、微秒級(jí)的EtherCAT硬實(shí)時(shí)網(wǎng)絡(luò)與高速模塊化IO系統(tǒng)深度融合,為Delta并聯(lián)機(jī)器人提供了一套高性能、高柔性、高集成度的控制解決方案。它有效地解決了高速抓放應(yīng)用中在實(shí)時(shí)同步、視覺集成和動(dòng)態(tài)適應(yīng)方面的核心痛點(diǎn),使“蜘蛛手”能夠穩(wěn)定、可靠地運(yùn)行于每分鐘數(shù)百次抓取的極致工況,成為推動(dòng)產(chǎn)線效能不斷提升的強(qiáng)勁引擎。
從食品包裝到電子組裝,BL350硬實(shí)時(shí)控制平臺(tái)正助力Delta機(jī)器人在工業(yè)4.0的浪潮中,展現(xiàn)出更強(qiáng)大的智能化與柔性化潛力。
審核編輯 黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31073瀏覽量
222162 -
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2945文章
47818瀏覽量
414810 -
ethercat
+關(guān)注
關(guān)注
19文章
1507瀏覽量
45167
發(fā)布評(píng)論請先 登錄
基于BL350平臺(tái)的焊接機(jī)器人智能控制與質(zhì)量追溯解決方案
如何使用機(jī)器人分析儀EtherCAT-Analyzer抓取主從站數(shù)據(jù)?

米爾RK3506核心板SDK重磅升級(jí),解鎖三核A7實(shí)時(shí)控制新架構(gòu)
基于鋇錸BL350的協(xié)作機(jī)器人安全控制解決方案:構(gòu)建面向未來的智能安全閉環(huán)
基于BL350與IGH?EtherCAT的硬實(shí)時(shí)控制解決方案
SCARA機(jī)器人高速高精拾放解決方案:基于ARMxy BL350系列的邊緣智能控制平臺(tái)
六軸工業(yè)機(jī)器人控制解決方案:基于ARMxy BL350系列的邊緣智能控制平臺(tái)
ARMxy控制器 + IGH EtherCAT:50大實(shí)時(shí)控制場景,賦能工業(yè)4.0柔性制造
高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動(dòng)控制方案
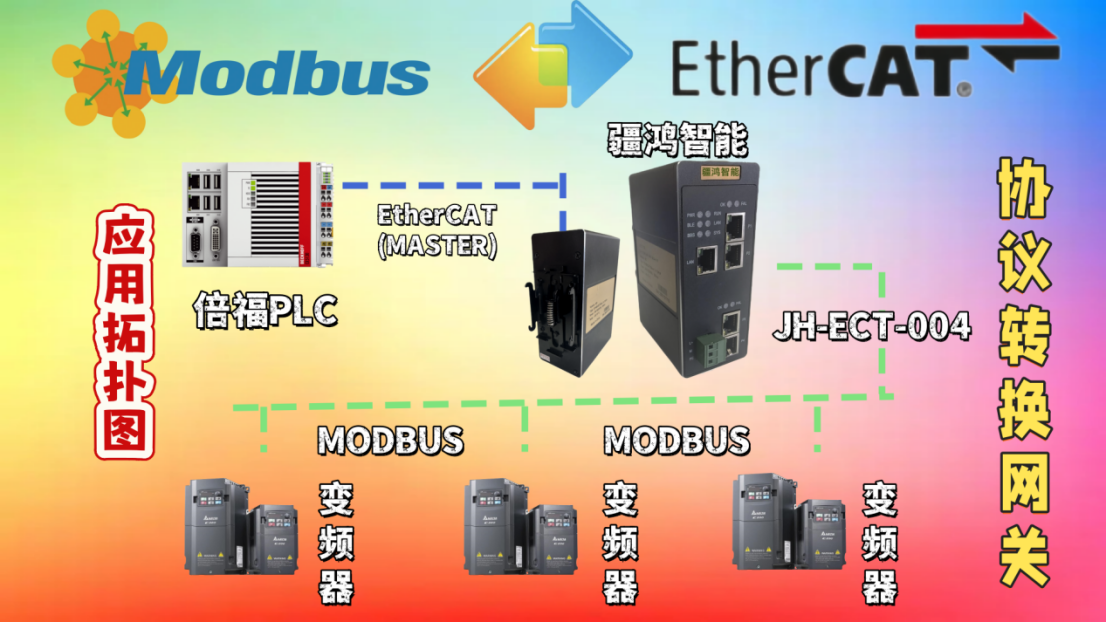
EtherCAT牽手MODBUS RS485,機(jī)器人小隊(duì)焊出完美火花
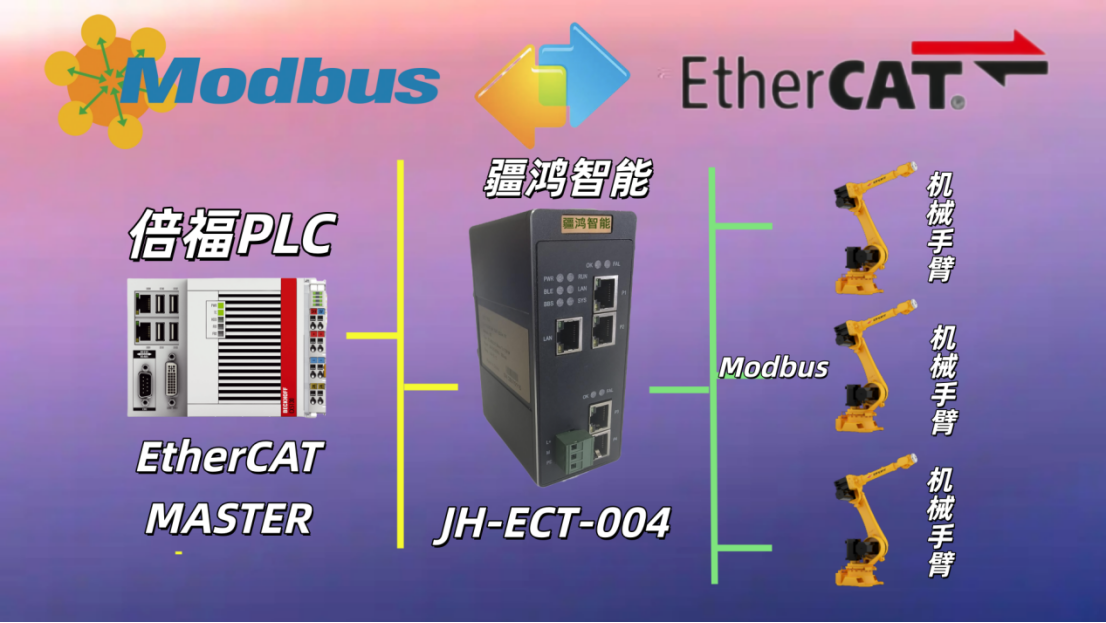
集成異構(gòu)網(wǎng)絡(luò):EtherCAT轉(zhuǎn)MODBUS機(jī)器人通信方案
視覺運(yùn)控一體機(jī)在DELTA并聯(lián)機(jī)械手動(dòng)態(tài)跟隨抓取的應(yīng)用

EtherCAT科普系列(7): EtherCAT技術(shù)在工業(yè)機(jī)器人控制系統(tǒng)領(lǐng)域的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論