") EtherNet/IP轉(zhuǎn)EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)庫卡機器人與歐姆龍PLC通訊的配置案例
EtherNet/IP轉(zhuǎn)EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)庫卡機器人與歐姆龍PLC通訊的配置案例


一、項目背景
國家管網(wǎng)集團(tuán)某分公司負(fù)責(zé)西北-華北原油干線國內(nèi)段運營。該段 185 km~225 km區(qū)間地勢起伏劇烈,設(shè)有一座新建 3#增壓泵站,承擔(dān) 55 bar→78 bar二次加壓任務(wù)。站內(nèi)采用“機器人巡檢+PLC工藝聯(lián)鎖”的少人值守架構(gòu)
為打通 EtherNet/IP←→EtherCAT數(shù)據(jù)壁壘,用戶最終選用 捷米特 JM-EIPM-ECT工業(yè)級協(xié)議轉(zhuǎn)換網(wǎng)關(guān),讓機器人成為 EtherNet/IP主站,直接讀寫 EtherCAT側(cè) PLC的 PDO,實現(xiàn)雙向 20 ms以內(nèi)的閉環(huán)控制。項目 2025-03-15啟動,2025-04-28完成熱試,至今連續(xù)無故障運行 2 200 h。
關(guān)鍵設(shè)備清單

三、JM-EIPM-ECT 協(xié)議轉(zhuǎn)換網(wǎng)關(guān)技術(shù)亮點
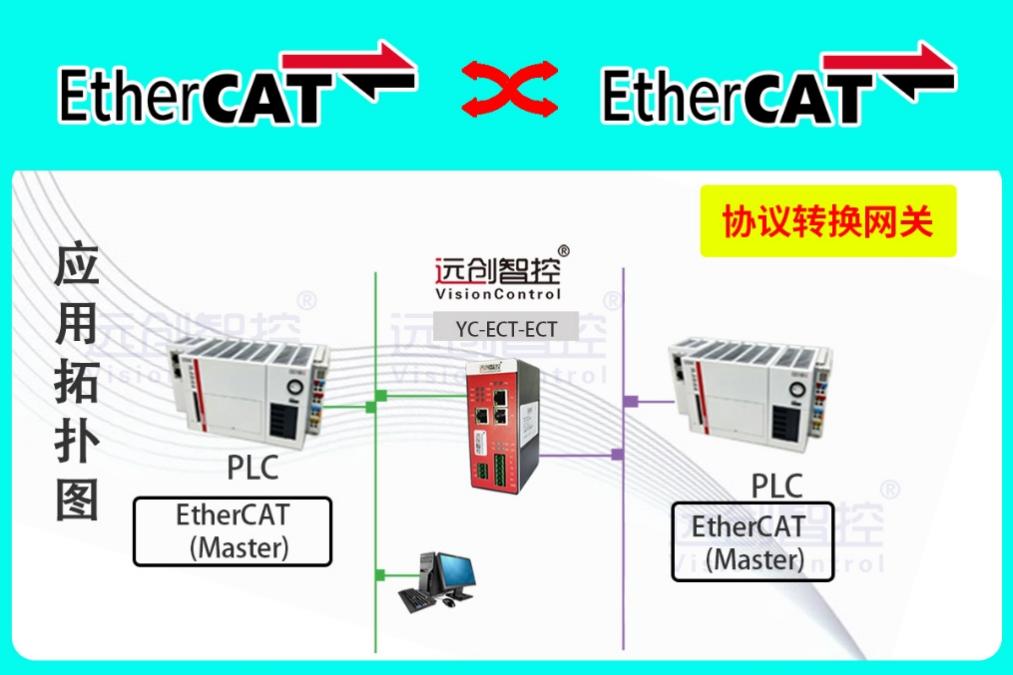
雙主站設(shè)計:EtherNet/IP側(cè)為主站,EtherCAT側(cè)為從站,與歐姆龍 PLC構(gòu)成“從站-主站”透明映射,無需修改 PLC程序;
數(shù)據(jù)長度:支持 1 500 Byte IN/OUT,滿足 32軸+200點 IO的完整 PDO;
實時性:實測往返 12 ms(KRC4→網(wǎng)關(guān)→NJ→網(wǎng)關(guān)→KRC4);
冗余:雙 24 VDC輸入,支持 1 μs 分布式時鐘同步;
環(huán)境:-45 ℃~+85 ℃,IP20鋁殼,35 mm DIN導(dǎo)軌安裝,MTBF ≥ 10萬 h。
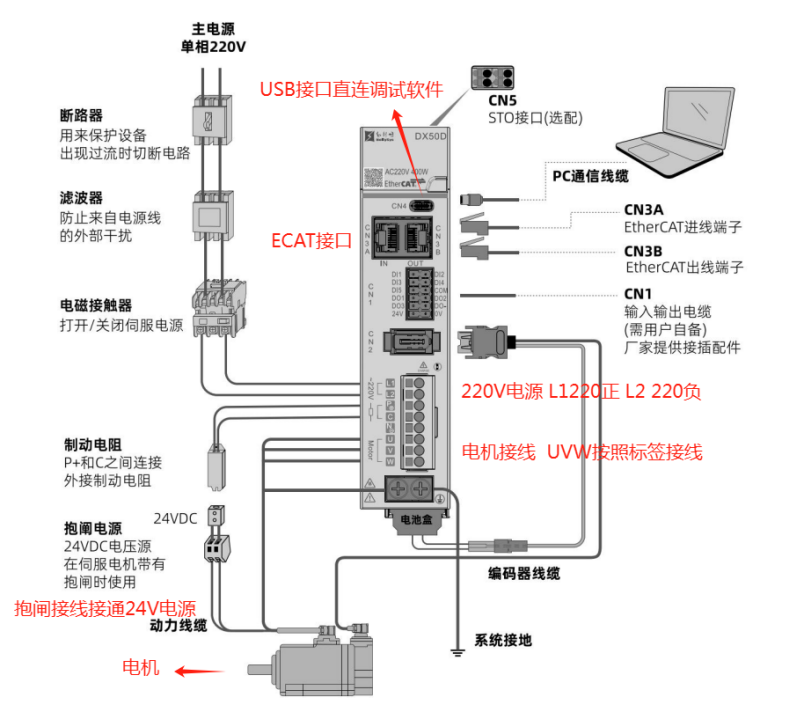
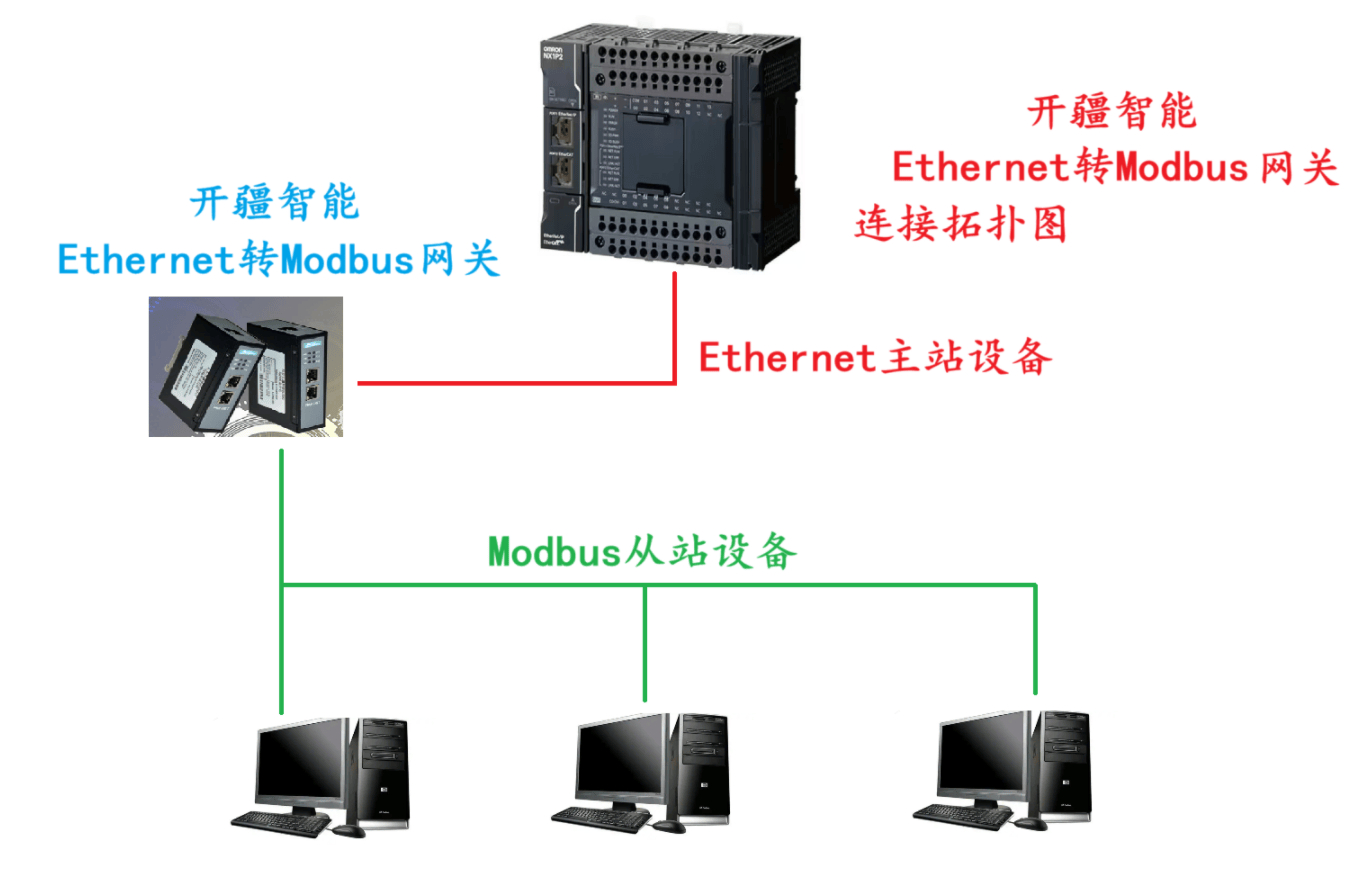
四、網(wǎng)絡(luò)拓?fù)渑c接線

網(wǎng)關(guān)供電:站內(nèi) 24 VDC冗余電源,端子 1+ / 2-;
接地:與泵站等電位網(wǎng) M6銅排連接,實測接地電阻 0.8 Ω;
屏蔽:EtherCAT采用 CAT5e屏蔽線,屏蔽層 360°壓接;
環(huán)網(wǎng):KRC4→OCTOPUS→JM-EIPM-ECT→NJ,RSTP 冗余恢復(fù)時間 < 20 ms。
五、配置步驟(詳細(xì))
① EtherCAT側(cè)(網(wǎng)關(guān)作為從站)
在 Sysmac Studio v1.52新建工程,導(dǎo)入捷米特提供的 JM-EIPM-ECT.xml ESI文件;
右側(cè)“EtherCAT”目錄右鍵→添加從站→選擇“JM-EIPM-ECT”;
根據(jù)機器人需求,分配 PDO映射:
IN(PLC→網(wǎng)關(guān)→機器人)
–泵軸承溫度 8×REAL
–泵 X/Y/Z振動 6×REAL
–進(jìn)口壓力 1×REAL
–運行狀態(tài) 1×UDINT
OUT(機器人→網(wǎng)關(guān)→PLC)
–紅外熱點溫度 1×REAL
–泄漏標(biāo)志 1×BOOL
–云臺水平/垂直角度 2×REAL
設(shè)置同步方式 DC-Sync,周期 2 ms;
編譯下載,PLC重啟后 ECT綠色指示燈常亮。
② EtherNet/IP側(cè)(網(wǎng)關(guān)作為主站)
打開 KUKA.WorkVisual 6.0,添加“EtherNet/IP Scanner”;
導(dǎo)入捷米特提供的 JM-EIPM-ECT.eds文件;
設(shè)置網(wǎng)關(guān) IP 192.168.1.10/24,RPI 8 ms,連接類型 Point-to-Point;
在“Assembly Instance”中對應(yīng) PDO長度:
Input Assembly 101 → 48 Byte
Output Assembly 100 → 20 Byte
下載至 KRC4,重啟后網(wǎng)關(guān) OK燈常亮,機器人示教器 Online顯示 48 Byte數(shù)據(jù)刷新正常。
③調(diào)試與驗證
使用 Wireshark抓包,EtherNet/IP顯示 8 ms周期 CIP數(shù)據(jù)幀,無丟包;
EtherCAT主站 側(cè)分布式時鐘抖動 < 50 ns;
現(xiàn)場做“啟泵-升壓-機器人巡檢”聯(lián)調(diào):當(dāng)泵軸承溫度 > 75 ℃時,機器人自動切換至高溫跟蹤模式,30 s內(nèi)完成熱像二次確認(rèn),同時 PLC收到“PUMP_ALARM”信號觸發(fā)降載,全過程 18.6 s,滿足設(shè)計 < 30 s?要求。

六、運行效果
巡檢效率:機器人由“盲巡”變?yōu)椤皵?shù)據(jù)驅(qū)動”,單次巡檢時間從 42 min降至 25 min;
故障響應(yīng):軸承高溫異常由原來人工 5~8 min發(fā)現(xiàn)縮短至 20 s;
生產(chǎn)保障:泵站自 2025-05投運以來,未發(fā)生一次因通訊延遲導(dǎo)致的誤停或漏巡;
維護(hù)成本:節(jié)省硬接線 1 200 m、I/O 模塊 18只,直接材料費下降 7.4萬元;
可擴展性:后續(xù)計劃把變頻器(PowerFlex 755,EtherNet/IP)也接入同一網(wǎng)關(guān),實現(xiàn)泵變頻-機器人視覺的閉環(huán)節(jié)能。
七、結(jié)語
通過捷米特 JM-EIPM-ECT工業(yè)級協(xié)議轉(zhuǎn)換網(wǎng)關(guān),3#增壓泵站成功實現(xiàn)了 EtherNet/IP機器人與 EtherCAT歐姆龍 PLC的跨協(xié)議實時通訊,打通了“工藝控制-智能巡檢”數(shù)據(jù)流,為輸油管道無人化、智能化升級提供了可復(fù)制、可推廣的范例。
審核編輯 黃宇
-
機器人
+關(guān)注
關(guān)注
213文章
31096瀏覽量
222361 -
Ethernet
+關(guān)注
關(guān)注
3文章
627瀏覽量
58105 -
ethercat
+關(guān)注
關(guān)注
19文章
1512瀏覽量
45276
發(fā)布評論請先 登錄
EtherCAT轉(zhuǎn)EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)歐姆龍PLC與匯川PLC通訊的配置案例
EtherNet/IP轉(zhuǎn)EtherNet/IP協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)歐姆龍 PLC與羅克韋爾PLC通訊的配置案例

EtherCAT轉(zhuǎn)EtherNet/IP協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)羅克韋爾PLC與歐姆龍PLC的雙向通訊
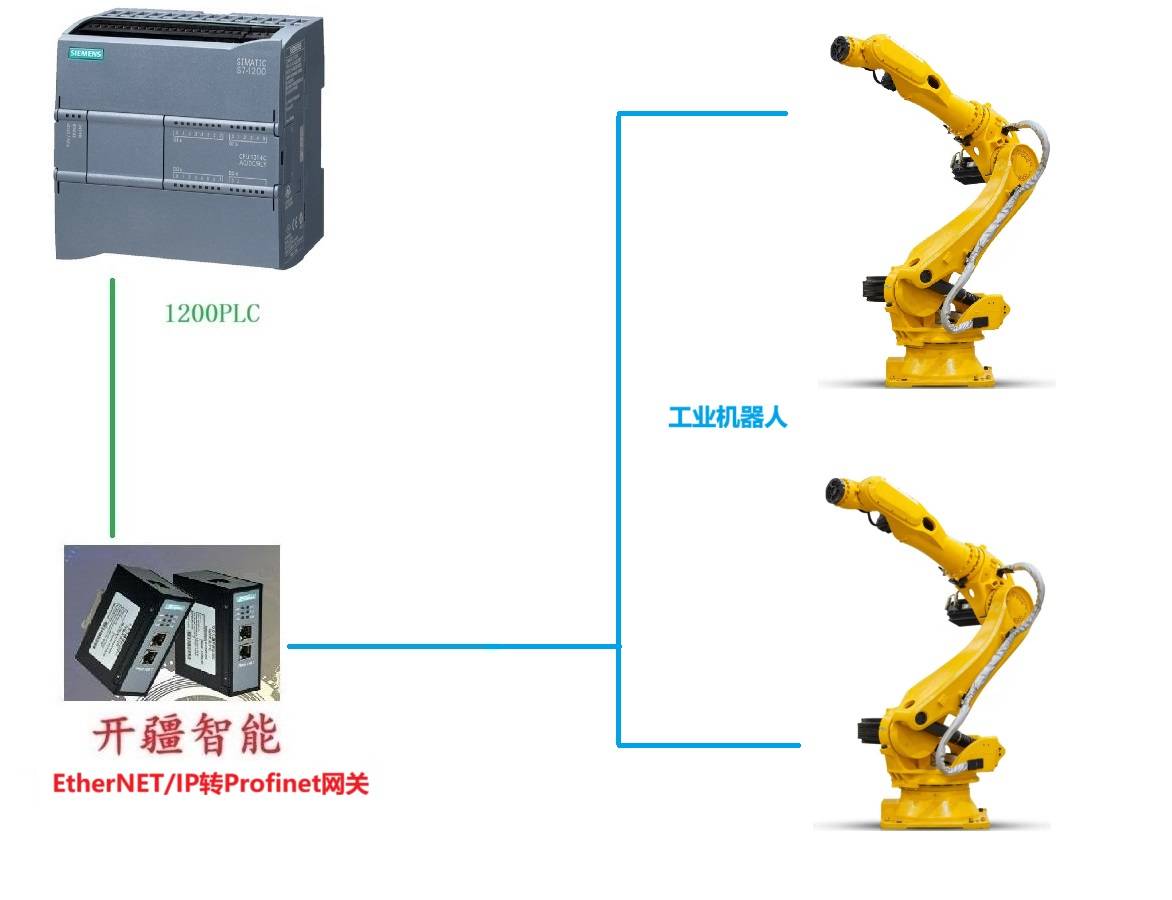
開疆智能Profinet轉(zhuǎn)EtherNET/IP網(wǎng)關(guān)連接機器人配置案例
Ethernet/IP轉(zhuǎn)ProfiNet協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)歐姆龍PLC與研祥(EVOC)工控機通訊的配置案例

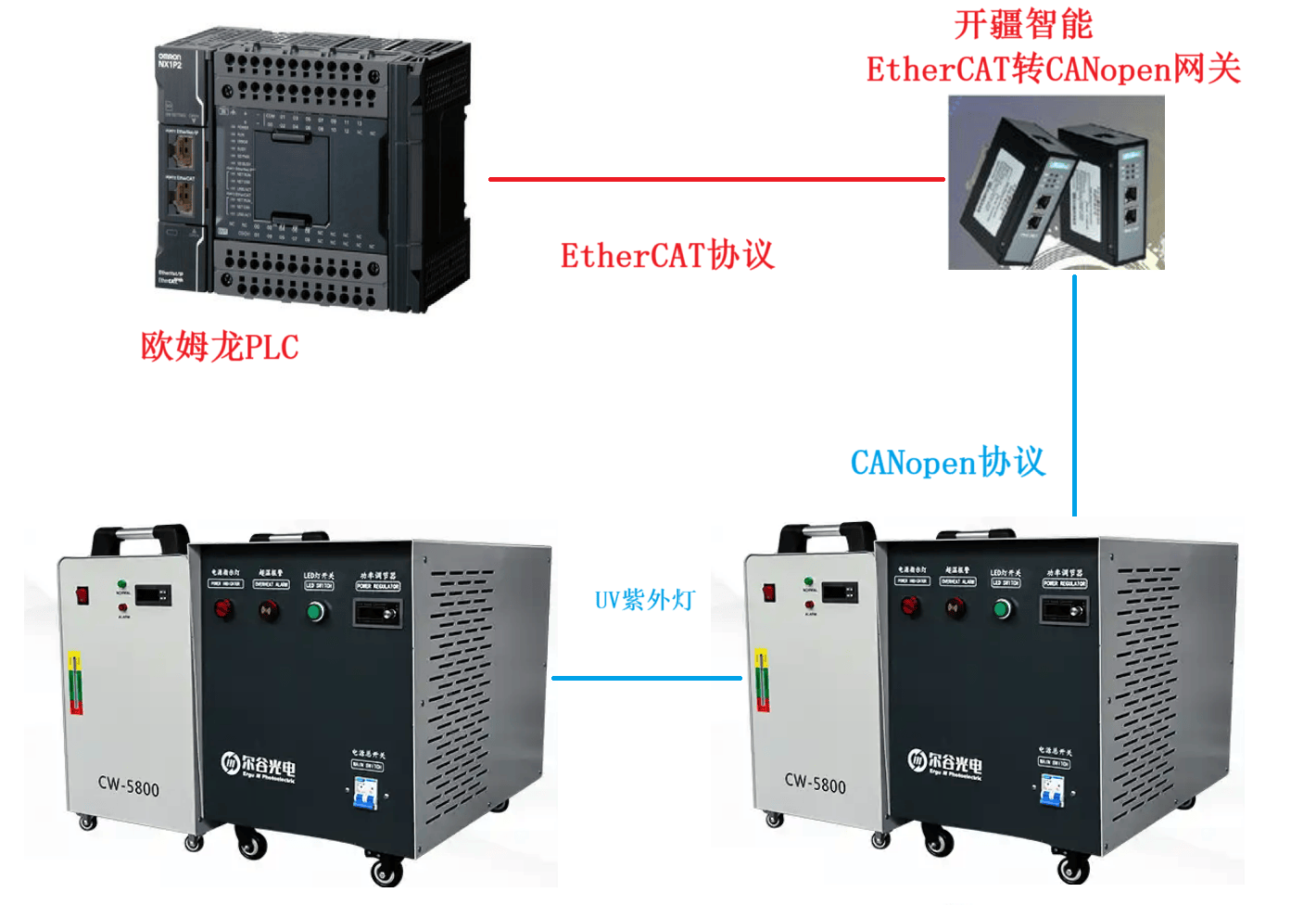
開疆智能EtherCAT轉(zhuǎn)CANopen網(wǎng)關(guān)連接UV燈配置案例
庫卡機器人與匯川PLC通訊——EtherNet/IP轉(zhuǎn) EtherCAT
如何實現(xiàn)羅克韋爾PLC與和利時伺服電機通訊-EtherCAT轉(zhuǎn)EtherNet/IP
工業(yè)物聯(lián)實戰(zhàn):如何通過EtherNet/IP網(wǎng)關(guān)實現(xiàn)Superisys RFID與歐姆龍NXJ系列 PLC的無縫通信?
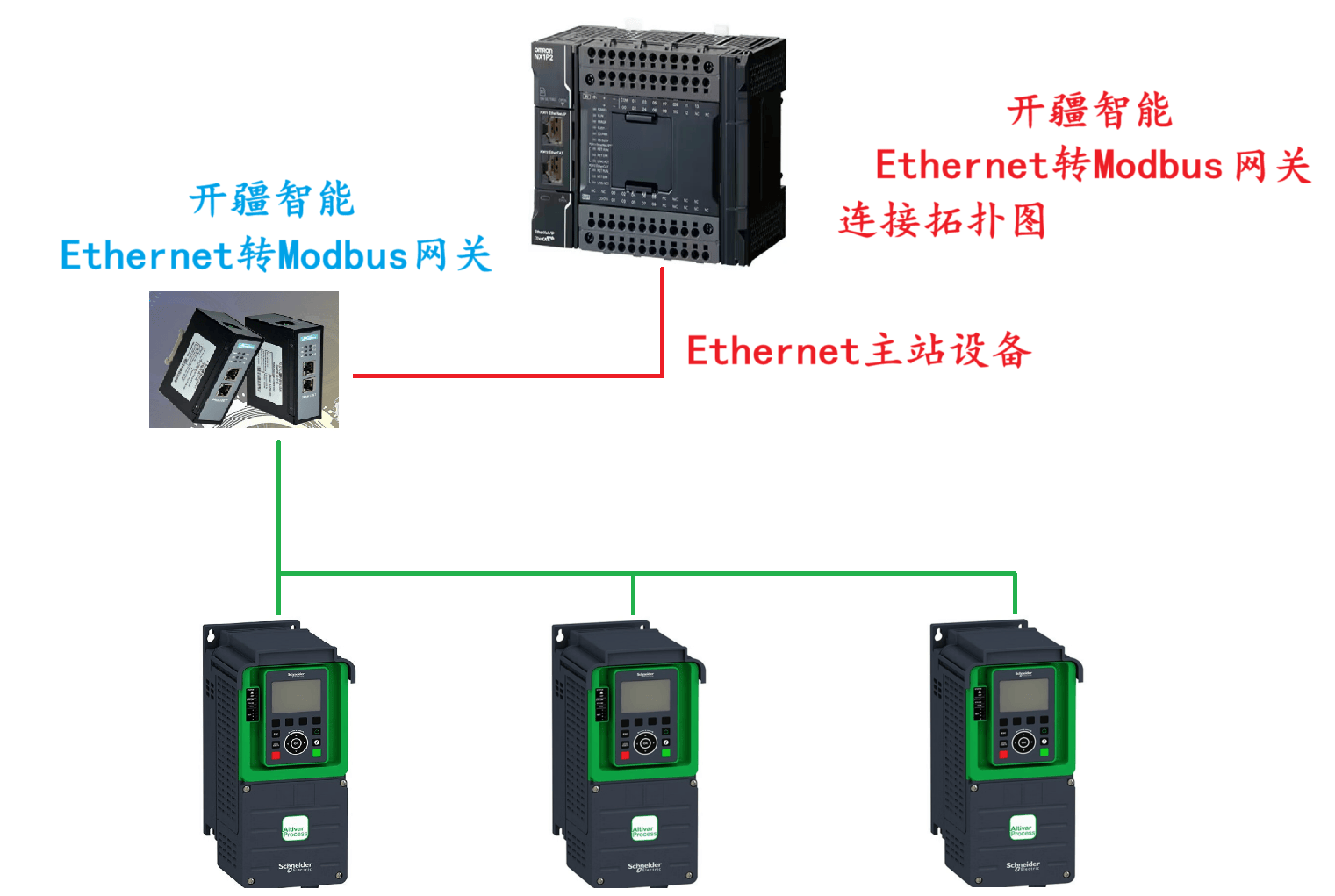
開疆智能Ethernet/IP轉(zhuǎn)Modbus網(wǎng)關(guān)連接變頻器配置案例
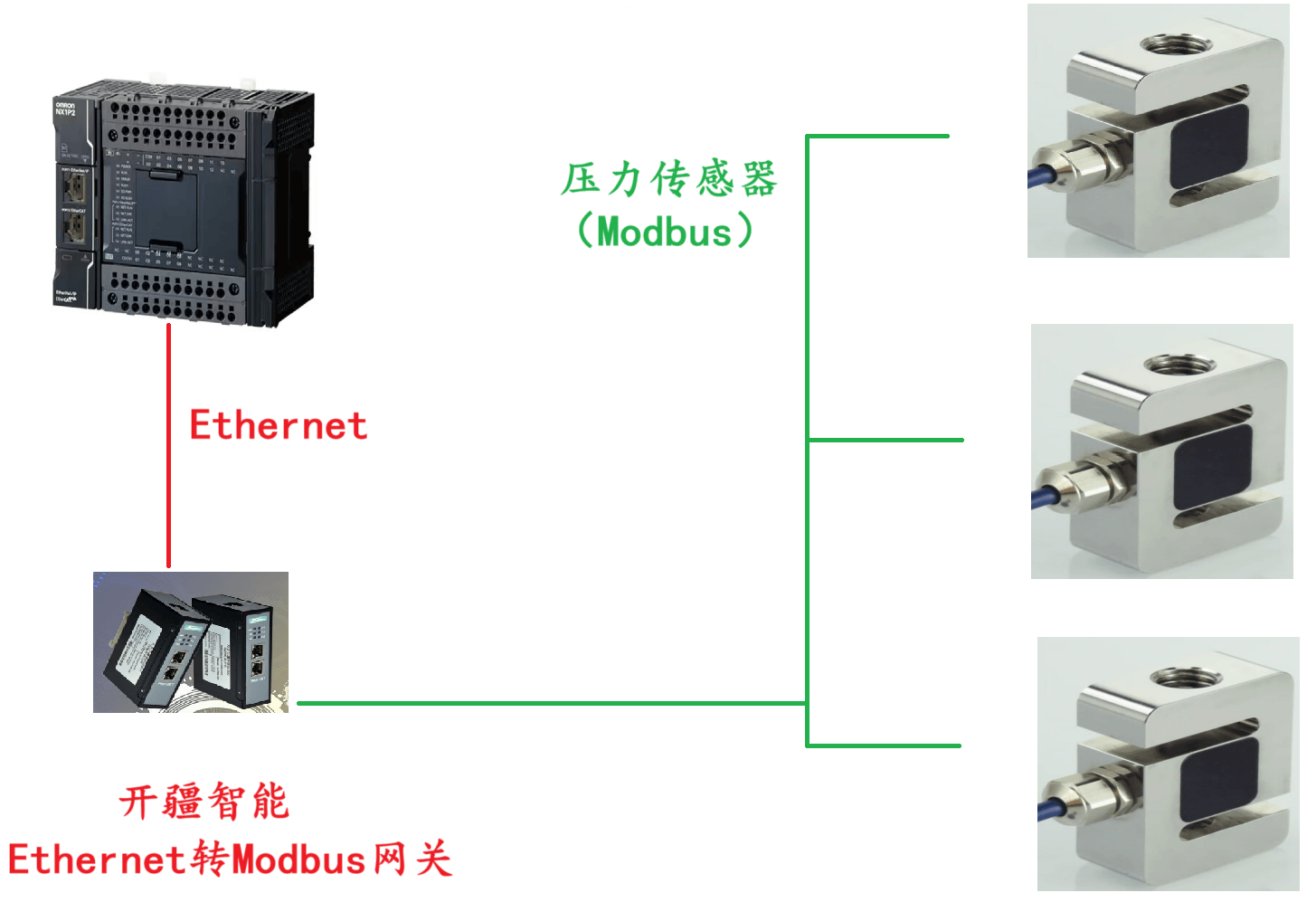
開疆智能Ethernet/IP轉(zhuǎn)Modbus網(wǎng)關(guān)連接斯巴拓壓力傳感器配置案例
跨協(xié)議探秘:profinet轉(zhuǎn)ethernet ip網(wǎng)關(guān)搞定川崎機器人與PLC通信

開疆智能Etherenet轉(zhuǎn)Modbus網(wǎng)關(guān)連接歐姆龍PLC配置案例
EtherCAT轉(zhuǎn)EtherNet/IP協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)羅克韋爾PLC與庫卡機器人連接通訊的配置案例

EtherCAT轉(zhuǎn)EtherNet/IP協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)歐姆龍 NJ PLC與發(fā)那科機器人連接通訊的配置案例




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論