 電控、電驅、電源從汽車向人形機器人遷移
電控、電驅、電源從汽車向人形機器人遷移

2025年11月5日,小鵬汽車人形機器人IRON在臺上的一段流暢“貓步”,因其高度擬人的步態在業界引發了廣泛討論,甚至小鵬CEO何小鵬先生“不得不”發布視頻為IRON“自證”。小鵬IRON這件事表面上看只是一次“質疑與證明”的沖突,但實際上卻釋放出了一種“深層信號”——新能源智能汽車產業成熟的元器件技術生態(電控、電驅與電源),正系統性地注入人形機器人這一全新載體。
除了小鵬之外,像特斯拉、比亞迪、奇瑞、賽力斯等國內外車企都或多或少地布局了人形機器人賽道。這種元器件技術遷移趨勢也自然而然地帶動Tire 1 廠商和元器件廠商紛紛跟進。
具備汽車電控、電驅與電源元器件技術背景的元器件廠商,憑借其在復雜系統集成上的深厚積累,正成為布局人形機器人賽道的核心力量。
一場從“驅動四個輪”到“賦能兩條腿”的元器件供應鏈能力大遷移,正隨著這一步一步的行走,從藍圖照進現實。
一 、技術同源:車企布局人形機器人的必然邏輯
車企巨頭們紛紛錨定人形機器人賽道,這背后是基于深刻產業邏輯的必然選擇。
從戰略層面看,布局人形機器人既是尋找增長新曲線的需要,也是反哺主業的戰略舉措。
更為重要的是,人形機器人本身有望率先應用于汽車制造產線,承擔精密裝配、質量檢測等復雜任務,從而開啟汽車智能制造的高階進化之路,形成一個“造機器人-用機器人造車-造更好的車”的產業正向循環。
而這一切戰略的基石,在于電控、電驅、大功率電源系統等元器件上存在的強大元器件技術同源性:
元器件電驅同源:汽車電驅系統對高扭矩密度、高功率密度和高效率的追求,與機器人關節執行器的核心技術要求完全一致。驅動車輪旋轉與驅動關節彎曲,在電磁轉換與能量傳遞的底層原理上相通。例如,豐立智能就由汽車新能源傳動齒輪遷移到機器人精密諧波減速器上,并且與星動紀元等機器人廠商達成了合作。
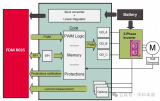
元器件電控同源:汽車的域控制器與電池管理系統這些元器件技術上必須具備的高實時性、高可靠性,與機器人關節伺服驅動和整機主控對計算芯片與功率芯片的要求一脈相承。
元器件電源同源:電動汽車對高能量密度動力電池與高效充放電管理的極致追求,正是解決人形機器人續航與功率瓶頸的關鍵。兩者的熱管理元器件技術也面臨著相似的材料與元器件結構挑戰。盡管目前主流人形機器人電源系統的電壓在48-96V這一區間,但特斯拉的人形機器人Optimus 就明確其采用了類似電車電源的400V甚至更高電壓的架構,可見汽車電子與人形機器人在電源元器件技術上同源未來可能會是一種趨勢。
這種深度的元器件技術同源,為原本服務于汽車產業的元器件供應鏈企業,鋪就了轉向人形機器人的技術高速公路。
二、 元器件技術賦能:核心“三電”供應鏈向人形機器人的遷移
要理解這場元器件供應鏈遷移如何發生,我們需深入剖析“三電”系統從汽車到人形機器人的元器件遷移路徑,看“三電”元器件技術如何具體賦能。
1、元器件電驅系統的遷移
人形機器人的關節模組是其力量的源泉,它需要將電能轉化為精準、強勁的機械運動。
執行器:執行器的核心是電機,像江蘇雷利這樣的廠商,正將其在汽車電子水泵、空調系統微型電機領域驗證過的技術,遷移至機器人所需的空心杯電機等高端微特電機產品上,并且與特斯拉、華為等多家機器人廠商展開了合作。
這類電機直徑可小至8毫米,卻能實現每分鐘數萬轉的高轉速,具備優異的功率密度和動態響應,為機器人關節提供了媲美肌肉的瞬時爆發力。
傳動系統:電機的高轉速需要通過精密減速機構轉化為大扭矩。兆威機電在汽車領域(如中控屏旋轉執行器)深耕的微型傳動系統與行星齒輪技術,正成為機器人靈巧手和關節模組的核心傳動方案。其推出的仿生靈巧手,集成了精密機械結構與驅動軟件,能夠實現17-20個自由度的獨立控制,完成復雜且柔順的抓取動作,這標志著電驅技術正從“提供動力”向“賦能巧力”演進。
此外,諸如三花智控、拓普集團等資深的汽車零部件供應商,已憑借其在汽車熱管理與底盤系統領域錘煉的機電一體化能力,成功研發出機器人專用的旋轉與直線執行器總成,實現了從“提供部件”到“交付整套執行機構”的戰略升級。
2、元器件電控系統的遷移:
精準的運動離不開實時、高效的控制。機器人的元器件電控系統如同分布式的小腦與神經網絡。
控制核心:機器人每個關節都可能需要一顆獨立的控制核心進行實時伺服控制。例如兆易創新基于ARM Cortex和RISC-V多核架構的GD32系列MCU,已在汽車車身控制等場景中證明了其可靠性和實時處理能力。這些元器件扮演著“關節小腦”的角色,負責接收主腦指令,并毫秒級地精準控制電機完成指定動作,是運動精度的底層保障。
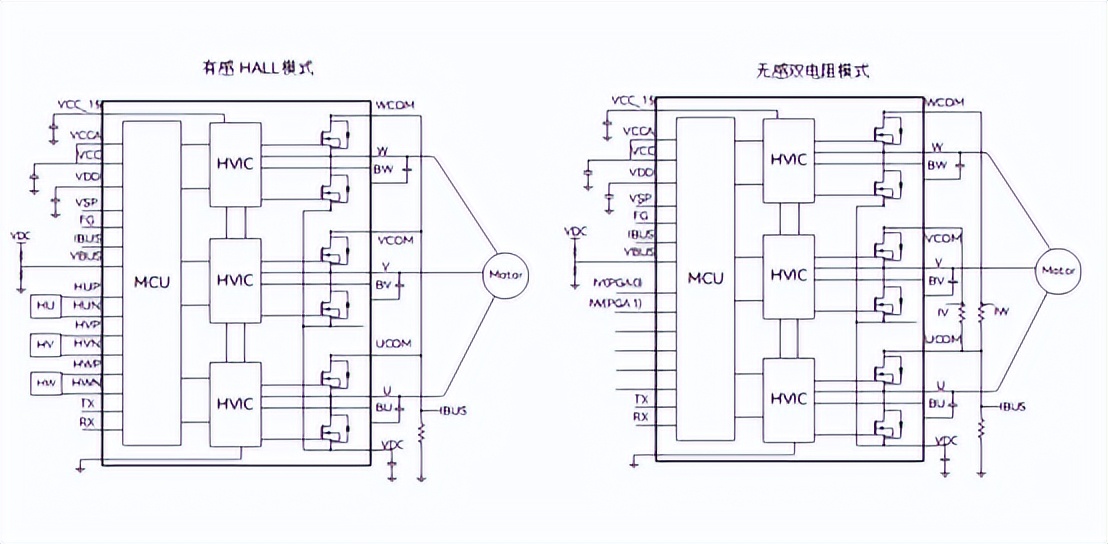
驅動與功率芯片:MCU發出的指令,需要通過電機驅動芯片和電源管理芯片(PMIC)來最終執行。必易微電子在汽車領域積累的電機驅動芯片和PMIC技術于此至關重要。以必易微電子的KP88676X系列IPM模塊為例,其集成了高性能 MCU、高壓三相柵極驅動和 MOSFET (600V),MCU上采用了ARM Cortex-M0+ 32 位處理器,最高頻率達到 96MHz,為人形機器人關節控制提供智能解決方案,該方案通過高度集成化設計,減少了30%外圍元器件數量。
3、元器件大功率電源系統遷移:
續航是機器人走出實驗室的終極考驗,其動力系統直接承襲自電動汽車。
動力電池元器件:以億緯鋰能、蔚藍鋰芯為代表的汽車動力電池制造商,正積極將應用于電動汽車的大圓柱電池等高性能液態鋰電池方案導入人形機器人領域。同時,為突破能量密度瓶頸,面向機器人的固態電池研發也已進入加速階段,旨在為未來的人形機器人提供更持久、更安全的動力心臟。
電源管理元器件:優秀的電池需要更智能的“管家”。在機器人動態行走、執行不同任務時,整機功耗會在極大范圍內快速波動。
這就對必易微等元器件廠商提供的PMIC和電池管理相關技術提出了極高要求。它們必須能夠動態、精準地優化能量分配,確保在高功耗的關節電機全力爆發時,核心運算單元和靈敏的傳感器仍能獲得“無噪聲”的純凈電源,這對維持整個系統在極端工況下的穩定性與可靠性至關重要。
03 未來展望:“三電”元器件供應鏈的演進路徑
隨著人形機器人從實驗室走向產業化,其背后的“三電”供應鏈將呈現清晰的發展脈絡。
執行器高度機電一體化:未來的關節模組將不再是電機、減速器、編碼器的簡單組裝,而是走向深度集成。或將出現“六合一”乃至“八合一”的元器件總成方案,將電機、驅動器、減速器、傳感器、控制器和散熱單元等元器件融為一體,實現功率密度和響應速度的跨越式提升。這要求供應商具備跨學科的“機-電-軟-控-熱” 綜合設計能力。
電控芯片的異構集成與智能化:單一功能的MCU或驅動元器件芯片將難以滿足復雜任務的需求。未來,控制核心將趨向于SoC化與異構架構。即在一顆芯片內集成高算力CPU核、實時控制MCU核、專用電機驅動單元及智能功率管理模塊。
動力系統的“全天候”續航追求:能量系統將沿著“液態鋰電池-半固態-全固態”的技術路徑迭代,目標是在2028-2030年實現400Wh/kg以上的能量密度。同時,動態無線充電、高效能量回收等源自電動汽車的技術將被引入,構建“碎片化補能”體系,從根本上解決機器人的續航焦慮。
當汽車的強大“三電”元器件技術成功注入人形機器人的軀體,我們迎來的將不僅是元器件技術的平滑遷移,更是一個由智能汽車與人形機器人“雙輪”驅動、真正實現人機共融的嶄新時代。
本文為嗶哥嗶特資訊原創文章,未經允許和授權,不得轉載,
審核編輯 黃宇
-
電機
+關注
關注
143文章
9461瀏覽量
152975 -
電控
+關注
關注
12文章
92瀏覽量
18597 -
人形機器人
+關注
關注
7文章
859瀏覽量
18237
發布評論請先 登錄
人形機器人“造車”,車企扎堆布局!

NVIDIA 發布三大利器,推動人形機器人邁向新紀元
最新發布!泰科機器人發布首款自研雙足人形機器人

推動人形機器人電源模塊高效運作的核心:液態引線型鋁電解電容器

藍思科技:今年承接智元機器人全系列多款人形機器人業務
邁來芯:憑借汽車芯片經驗,為人形機器人發展添磚加瓦
人形機器人設計中,哪些關鍵部位需要功率器件?典型電壓/電流參數如何設計?
中科本原推出面向人形機器人的關節電機解決方案
春晚后人形機器人升級,驚呆網友:中國的AI技術不可想象
人形機器人涉及的化工材料
伺服電動缸在人形機器人中的應用
天創機器人發布全球首款防爆人形機器人“天魁1號”
小鵬汽車公布人形機器人腿部結構創新專利
全球巨頭加速布局人形機器人賽道
《人形機器人產業地圖(2024)》重磅發布!






 工商網監
工商網監
評論