") 瑞芯微Camera調(diào)試避坑指南:從Sensor到MIPI的常見問題全解析
瑞芯微Camera調(diào)試避坑指南:從Sensor到MIPI的常見問題全解析

在智能硬件領(lǐng)域,Camera模塊是安防監(jiān)控、車載影像、消費電子的核心組件——但調(diào)試過程中,“I2C不通”“畫面偏綠”“MIPI數(shù)據(jù)采不到”等問題往往讓工程師頭大。
今天這篇文章,基于瑞芯微(Rockchip)官方Camera External FAQ(V2.1),梳理從Sensor初始化到MIPI傳輸、ISP處理的全鏈路常見問題,附帶現(xiàn)象分析與分平臺解決方案,幫你少走彎路,快速定位問題!
一、Sensor調(diào)試:先解決“源頭”問題
Camera的核心是Sensor,若Sensor初始化或輸出異常,后續(xù)鏈路再完美也無用。以下是4類高頻Sensor問題的速解方案(適配瑞芯微RV1108/RV1126/RK356X等平臺)。
1.最基礎(chǔ):Sensor I2C不通,提示“NO ACK”
問題現(xiàn)象:軟件日志報“I2C NO ACK”,Sensor無法被識別。
關(guān)鍵原因:硬件供電/時序異常,或軟件配置不匹配。
排查步驟(按優(yōu)先級):
1.查Sensor硬件輸入:確認(rèn)AVDD/DVDD/DOVDD電源是否符合規(guī)格,復(fù)位腳/待機(jī)腳電平是否正確;
2.查I2C硬件:上拉電平是否與DOVDD匹配(避免3.3V上拉接1.8V DOVDD),MCLK時鐘頻率/幅度是否正常;
3.查主控配置:確認(rèn)I2C通道是否正確,設(shè)備地址是否匹配,嘗試降低SCL頻率(過高會導(dǎo)致信號質(zhì)量差);
4.特殊情況:部分Sensor不支持“I2C Repeat start”,需在驅(qū)動中關(guān)閉該功能。
2.最影響體驗:曝光調(diào)整時畫面閃爍(以OV2710為例)
問題現(xiàn)象:環(huán)境亮度驟變時,畫面低概率閃爍,但最終曝光能收斂(亮度和速度正常)。
關(guān)鍵原因:曝光時間與增益的“生效幀不同步”——OV2710的曝光時間在N幀設(shè)置、N+2幀生效,而增益在N幀設(shè)置、N+1幀生效,兩者變化趨勢相反時就會閃。
分平臺解決方案:
?RV1108(Linux SDK):在Sensor驅(qū)動中通過exposure_valid_frame定義生效幀數(shù),參考《CIF_ISP11_Driver_User_Manual》,SDK已優(yōu)化間隔設(shè)置;
?其他平臺(Android 9.0/Linux):升級camera_engine_rkisp至v2.0.0+,按手冊配置生效時序;
?舊系統(tǒng)(Android 8.1及以前):在IsiExposureControlIss函數(shù)中,給曝光時間與增益的設(shè)置加“幀率對應(yīng)的延時”。
3.最直觀:預(yù)覽畫面偏色(偏紅/偏綠)
情況1:整體均勻偏紅
問題現(xiàn)象:畫面蒙一層淡紅,色卡色調(diào)正常,遮黑后Raw圖黑電平異常。
原因:Sensor輸出黑電平與ISP校正值不匹配,或數(shù)據(jù)位寬壓縮(如A-Law算法)導(dǎo)致線性失真。
解決:
?測Raw圖黑電平:ON2 Sensor(8bit=10,10bit=42)、OV Sensor(8bit=[3,4])、IMX327(10bit=60,12bit=240),按規(guī)格配置寄存器;
?關(guān)閉壓縮功能:如AR0144需將R0x31D0設(shè)為0,禁用A-law壓縮,確保數(shù)據(jù)線性化。
情況2:鏡像/翻轉(zhuǎn)后偏色(以GC2375為例)
問題現(xiàn)象:配置mirror/flip后偏色,Raw圖Bayer順序異常。
原因:鏡像后Sensor輸出Bayer順序變化(如BGGR→GBRG),但ISP未同步更新。
解決:
?用宏定義配置鏡像:避免直接改寄存器,如#define GC2375_MIRROR_NORMAL;
?更新驅(qū)動Bayer順序:RV1108改struct ov_camera_module_config.frm_fmt.code,其他平臺改IsiSensorCaps_t.BayerPatttern。
4.最隱蔽:MCLK時鐘幅度異常(僅200mV或無輸出)
問題現(xiàn)象:示波器測MCLK幅度不足(正常需符合Sensor Spec),或無時鐘信號。
原因:主控IO復(fù)用配置錯、電源域未供電,或軟件與硬件電源域不匹配。
解決:
1.查IO復(fù)用:按平臺手冊確認(rèn)CIF_CLKOUT引腳配置(如RK3326的CIF_CLKO_MO對應(yīng)GPIO2_B3_d);
2.查電源域:RK3326的CIF_CLKO_MO依賴VCCIO3,若硬件接1.8V則在DTS中配置vccio3-supply = <&vcc1v8_dvp>;RK3399的APIO2_VDD接3.0V則設(shè)bt656-supply = <&vcc_3v0>。
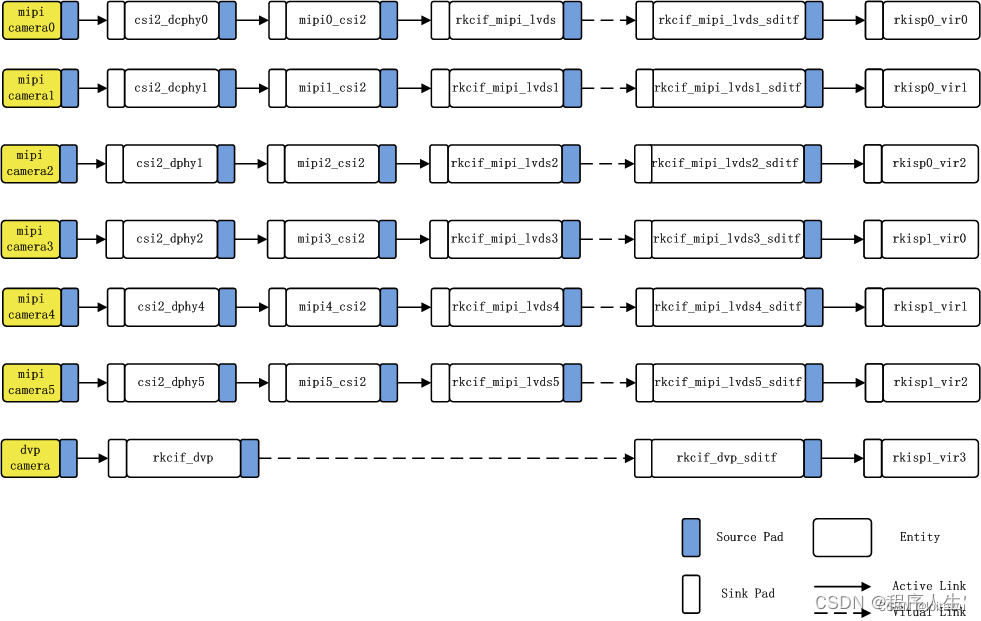
二、MIPI接口:數(shù)據(jù)傳輸?shù)?/span>“命脈”調(diào)試
MIPI是Sensor與主控之間的核心鏈路,一旦出錯會導(dǎo)致“花屏”“采不到數(shù)據(jù)”“FIFO溢出”。先明確MIPI錯誤分類,再按優(yōu)先級排查!
1.先搞懂:MIPI錯誤分3級,排查有順序
瑞芯微將MIPI錯誤按“鏈路層級”分類,必須先解決底層錯誤,再處理上層:
1.DPHY Level:物理層錯誤(如SOT錯誤、False Control Error);
2.CSI-2 Controller Level:控制器錯誤(如CsiFifoOverflow);
3.CSI-2 Packet/Protocol Level:數(shù)據(jù)包/協(xié)議錯誤(如CRC/ECC錯誤、ErrFrameSync)。
若日志無明確錯誤,但采不到數(shù)據(jù),先查DPHY狀態(tài)寄存器(如RV1126的0xffb51c14),重點看:
?RxClkActiveHS:1=CLK Lane有有效高速時鐘;
?StopstateData:0/1交替= Data Lane正常傳輸(高速與停止?fàn)顟B(tài)切換);
?RxUlpsExc:0=Data Lane未進(jìn)入超低功耗(高速傳輸時需為0)。
2.高頻場景:MIPI采不到數(shù)據(jù),且無報錯
問題現(xiàn)象:I2C通訊正常,Sensor已輸出數(shù)據(jù),但主控端無MIPI錯誤提示,VICAP/ISP報“未采集到數(shù)據(jù)”。
排查步驟:
1.先查RxClkActiveHS:
?若為0:用示波器測CLK Lane是否有高速時鐘,檢查Sensor是否Stream on,硬件連接是否斷連;
?若為1:查StopstateData,若某Lane無0/1變化,測該Lane信號幅度是否符合DPHY Spec(如LP態(tài)1.2V,HS態(tài)200mV)。
1.特殊情況(CLK Lane Continue模式):
?若UlpsActiveNotClk為0(CLK Lane進(jìn)入ULPS),需排查上電波形是否有異常的LP10→LP00(導(dǎo)致誤觸發(fā)ULPS);
?若SOT序列(LP11→LP01→LP00→HS-0)發(fā)送早于DPHY初始化,需讓Sensor在主控DPHY就緒后再輸出SOT。
3.易錯點:D-PHY錯誤(ErrSotHS/ErrSotSyncHS)
問題現(xiàn)象:日志報“D-PHY Level Error: ErrsotHS/ErrSotSyncHS”,畫面花屏或采不到數(shù)據(jù)。
原因:SOT(傳輸起始)時序不符合MIPI Spec,或Ths-settle(HS接收穩(wěn)定時間)配置錯誤。
解決:
1.滿足時序要求:
?Ths-settle > Ths-prepare(40ns+4UI);
?Ths-settle < Ths-prepare + Ths-zero(145ns+10UI);
?CLK Lane需提前8UI輸出HS時鐘(TCLK-PRE)。
1.配置Ths-settle:
?DPHY-I(RK3326/RV1108):按bitrate選寄存器,如1.25Gbps對應(yīng)4b'1100,Ths-settle=128UI;
?DPHY-S(RK3399/RK3288):1.3-1.5Gbps對應(yīng)4b'1100,Ths-settle=63×received_DDR_clock。
4.致命錯:CsiFifoOverflow(FIFO溢出)
問題現(xiàn)象:日志報“CSI-2 Controller Error: CSIFIFOOVERFLOW”,數(shù)據(jù)丟失。
原因:ISP吞吐率跟不上MIPI傳輸速率,或多Lane數(shù)據(jù)時延不同步。
解決:
1.先查DPHY錯誤:若有底層錯誤(如SOT錯誤),優(yōu)先解決;
2.驗證速率匹配:按公式計算(保守值):
ISP時鐘(Hz) × 80% > (MIPI bitrate × Lane數(shù)) / 12
例:ISP時鐘500MHz,MIPI 1Gbps×2Lane → 500e6×0.8=400e6,(1e9×2)/12≈166e6,滿足要求;
3.多Lane同步:用示波器測各Data Lane的SOT時序,時延差需≤1UI,否則調(diào)整硬件走線。
三、ISP與數(shù)據(jù)傳輸:避免“最后一公里”問題
Sensor和MIPI正常后,ISP處理異常會導(dǎo)致“丟幀”“畫質(zhì)差”,以下是2類核心問題。
1. PIC_SIZE_ERROR:分辨率不匹配
問題現(xiàn)象:日志報“CIF_ISP_PIC_SIZE_ERROR”,ISP采集數(shù)據(jù)量與設(shè)置分辨率不符。
排查步驟:
1.先查MIPI/DPHY錯誤:若有則優(yōu)先解決(如數(shù)據(jù)傳輸不完整);
2.驗證分辨率設(shè)置:確保ISP采集分辨率≤ Sensor輸出分辨率(如Sensor輸出1920×1080,ISP不能設(shè)2560×1440);
3.后級限制:若前兩步正常,排查ISP輸出鏈路(如DDR帶寬不足),參考“Data loss”解決方案。
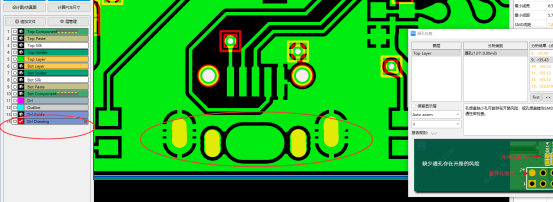
2. Data loss:數(shù)據(jù)丟失(最常見)
問題現(xiàn)象:日志報“CIF_ISP_DATA_LOSS”,預(yù)覽閃粉屏/綠屏,或錄制丟幀。
原因:ISP內(nèi)部Latency FIFO溢出,多因DDR速率不足或AXI優(yōu)先級低。
解決:
1.優(yōu)化DDR:提高DDR頻率,禁用DDR變頻(傳輸中變頻會導(dǎo)致卡頓);
2.提高ISP優(yōu)先級:在DTS中設(shè)ISP AXI Master優(yōu)先級最高(如rockchip,priority=<33>);
3.增加Sensor H-blanking時間:減少數(shù)據(jù)傳輸壓力;
4.舊系統(tǒng)修復(fù):Android 8.1及以前版本,升級kernel-3.10驅(qū)動至v0.0x26.0+,解決綠屏無法恢復(fù)問題。
四、調(diào)試必備:工具與參考文檔
1.硬件工具:示波器(測MCLK、MIPI Lane波形)、邏輯分析儀(抓I2C時序);
2.軟件工具:查看MIPI錯誤寄存器(如RK3399 ISP0寄存器0xff911c0c)、DPHY狀態(tài)寄存器(參考文檔附錄G);
3.官方手冊:
?《CIF_ISP11_Driver_User_Manual》(RV1108驅(qū)動);
?《RKISP_Driver_User_Manual》(其他平臺);
?《mipi_D-PHY_specification_v2.1》《mipi_CSI-2_specification_v2.0》(MIPI標(biāo)準(zhǔn))。
最后:調(diào)試的核心邏輯
Camera問題看似雜亂,實則有章可循——先定位層級(Sensor→MIPI→ISP),再抓關(guān)鍵信號(電源、時鐘、數(shù)據(jù)):
?Sensor層:先確保供電、I2C、MCLK正常;
?MIPI層:先查DPHY狀態(tài),再按錯誤級別排查;
?ISP層:先解決前級數(shù)據(jù)傳輸問題,再優(yōu)化速率與優(yōu)先級。
你在Camera調(diào)試中遇到過哪些“奇葩”問題?比如“正對太陽出現(xiàn)縱向黑條”(SC410AI)、“HDR低光下帶狀條紋”(IMX415)?歡迎在評論區(qū)分享,一起避坑!
-
調(diào)試
+關(guān)注
關(guān)注
7文章
646瀏覽量
35652 -
MIPI
+關(guān)注
關(guān)注
11文章
355瀏覽量
50878 -
瑞芯微
+關(guān)注
關(guān)注
27文章
792瀏覽量
54287
發(fā)布評論請先 登錄
RK3588-Camera:MIPI-CSI調(diào)試之通路解析
瑞芯微RK3399開發(fā)板注冊一個 Camera Sensor 設(shè)備方法
RK3399瑞芯微開發(fā)板Camera_test 測試程序使用方法
瑞芯微RK3399嵌入式開發(fā)板注冊一個 Camera Sensor 設(shè)備方法
如何調(diào)試LCD Mipi?調(diào)試LCD Mipi常見問題有哪些?
記錄一下調(diào)試rk3288-android9下的ov13850遇到的坑
PCB設(shè)計避坑指南
PCBA代工避坑指南:常見問題+解決方案全解析
VVIC 平臺商品詳情接口高效調(diào)用方案:從簽名驗證到數(shù)據(jù)解析全流程
京東商品詳情接口實戰(zhàn)解析:從調(diào)用優(yōu)化到商業(yè)價值挖掘(附避坑代碼)

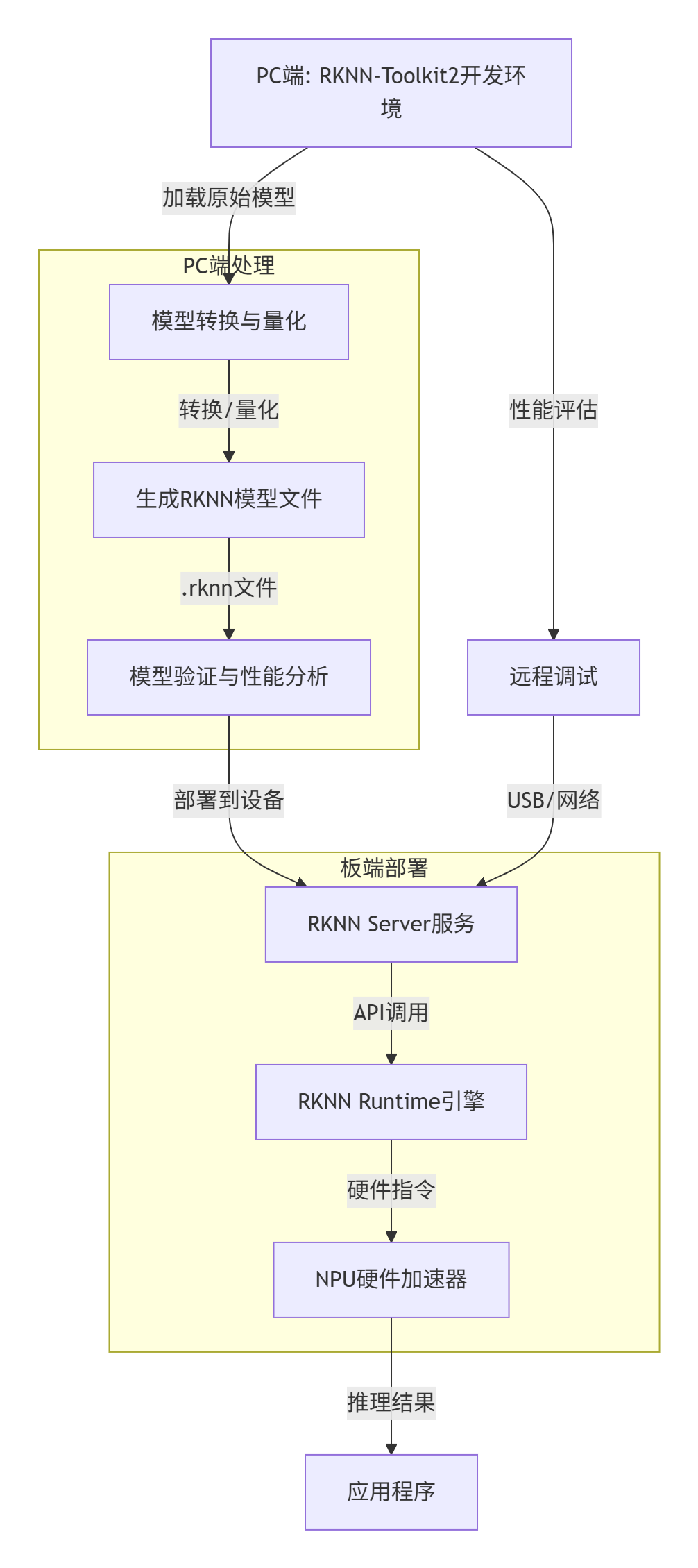
瑞芯微RKNPU開發(fā)全指南:從環(huán)境搭建到性能優(yōu)化,一文搞定邊緣AI部署
linux系統(tǒng)下M.2硬盤調(diào)試和測試全指南:從初始化失敗到讀寫滿速,避坑就看這篇
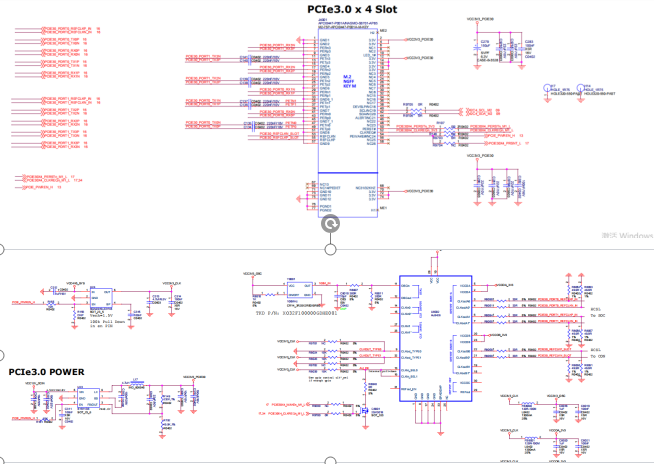
一文搞懂?RK3588 PCIe:從硬件資源到拆分配置?+?避坑指南(含腦圖)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論