") 國(guó)內(nèi)首度自主研發(fā)機(jī)器仿生手掌 具有輕巧與多自由度靈活的特性
國(guó)內(nèi)首度自主研發(fā)機(jī)器仿生手掌 具有輕巧與多自由度靈活的特性

國(guó)內(nèi)首度自主研發(fā)機(jī)器仿生手掌取代過(guò)往機(jī)器手臂末端的夾爪,以逼近人類(lèi)真實(shí)手掌的多自由度讓手臂在夾取時(shí)的動(dòng)作更細(xì)膩靈敏。加上其運(yùn)用碳纖復(fù)合材料,重量上更與手機(jī)相差無(wú)幾。機(jī)器仿生手掌具有輕巧與多自由度靈活的特性,被視為可在未來(lái)造福組裝義肢的患者,甚至國(guó)內(nèi)也計(jì)畫(huà)要結(jié)合感測(cè)貼片偵測(cè)肌肉變化,已通知仿生手掌進(jìn)行動(dòng)作預(yù)測(cè),將使人機(jī)之間的互動(dòng)更加緊密自然。
現(xiàn)行機(jī)器手臂的末端主要透過(guò)各種夾具進(jìn)行抓取動(dòng)作,不過(guò)在夾具方面仍有一些限制,例如僅能抓取特定外型或是硬度較高的物件。由工研院首度研發(fā)的機(jī)器仿生手掌則是有別于夾具的設(shè)計(jì),而直接仿造人類(lèi)真實(shí)手掌的結(jié)構(gòu)進(jìn)行設(shè)計(jì),可達(dá)到六個(gè)自由度,除了原先五指關(guān)節(jié)外,又增加大拇指基部的活動(dòng)范圍,使其運(yùn)動(dòng)關(guān)系與人手相應(yīng)關(guān)節(jié)的運(yùn)動(dòng)相似,可讓抓握的動(dòng)作更細(xì)膩。
不過(guò)工研院發(fā)現(xiàn)由于五指關(guān)節(jié)的設(shè)計(jì)可能對(duì)于生產(chǎn)在線(xiàn)的工業(yè)型機(jī)器人造成部分冗余,相較之下似乎更適合以人為本的應(yīng)用情境。特別是若將其運(yùn)用在醫(yī)療領(lǐng)域,則可以用作智能義肢用途,彌補(bǔ)斷掌人員缺手的不便。
工研院研究人員表示,雖然醫(yī)學(xué)上有機(jī)械義肢,但部分會(huì)把驅(qū)動(dòng)裝置設(shè)計(jì)于腕部下方,造成使用上「卡卡」的,而工研院所研發(fā)的機(jī)器仿生手掌則是把驅(qū)動(dòng)裝置微型化,并在不影響外觀的前提下設(shè)計(jì)于手背的位置,讓機(jī)器仿生手掌與殘肢連結(jié)的部分更加舒適自然。
而在機(jī)器仿生手掌的結(jié)構(gòu)設(shè)計(jì)上也是由工研院一手包辦。在手指各關(guān)節(jié)連動(dòng)的部分,工研院為提升抓取時(shí)的力道強(qiáng)度而采用金屬連桿,目前根據(jù)測(cè)試至少可抓取超過(guò)三公斤的物體,象是一般手工具如鉆孔機(jī)就可使用。此外,在材質(zhì)方面則是采用碳纖復(fù)合材質(zhì)地,重量輕巧,經(jīng)測(cè)試幾乎與一般手機(jī)相差無(wú)幾。
若是將來(lái)此機(jī)器仿生手掌可望造福組裝義肢的患者,那么在設(shè)計(jì)上未來(lái)也將更貼近人性的需求。市面上的普通義肢一般通過(guò)開(kāi)關(guān)或按鈕來(lái)操縱,或者是由使用者手動(dòng)操作,不過(guò)工研院則是計(jì)畫(huà)在未來(lái)改善這種操作方式,即讓機(jī)器仿生手掌具備感知能力。
這個(gè)原理在許多科幻電影當(dāng)中其實(shí)都出現(xiàn)過(guò),甚至美國(guó)約翰霍普金斯大學(xué)旗下的實(shí)驗(yàn)室也成功研發(fā)過(guò)一款具有感知能力的機(jī)器手臂,成功為一名因被浣熊咬傷手臂,而造成感染被迫截肢的女性患者,讓其重新恢復(fù)跟正常人一樣的觸覺(jué)。
工研院的計(jì)畫(huà)則是未來(lái)也能讓截肢部位貼上感測(cè)貼片,以偵測(cè)截肢部位的肌肉變化,從而讓機(jī)器仿生手掌感知并接收使用者肌肉傳來(lái)的訊號(hào),以便進(jìn)行動(dòng)作預(yù)測(cè),使得人機(jī)之間的互動(dòng)更加順暢。甚至未來(lái)也有望將觸覺(jué)皮膚導(dǎo)入于指腹或手掌內(nèi),將觸覺(jué)訊號(hào)回傳給神經(jīng),讓使用者也感受到仿生手掌的一切觸覺(jué)。
工研院表示,在智能義肢發(fā)展的目標(biāo)到位之前,目前此機(jī)器仿生手掌的初步功能是作為取代夾爪用途,可賦予機(jī)器手臂更細(xì)膩的動(dòng)作,能抓取形狀不規(guī)則與軟性物件,搭配行動(dòng)式裝置則可適用于賣(mài)場(chǎng)貨品巡檢、牲畜飼養(yǎng)廠(chǎng)巡檢以及各式生產(chǎn)環(huán)境站別間運(yùn)載及上下料等用途。
而此機(jī)器仿生手掌也于今年***機(jī)器人與智能自動(dòng)化展上首度亮相,現(xiàn)場(chǎng)則是結(jié)合行動(dòng)式手臂機(jī)器人系統(tǒng)展示。倘若此機(jī)器仿生手掌未來(lái)實(shí)現(xiàn)于智能義肢應(yīng)用,不但可造福因事故而行動(dòng)不便的患者,更可為***醫(yī)療與機(jī)械產(chǎn)業(yè)的研發(fā)能力上再寫(xiě)下新頁(yè)。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222266
發(fā)布評(píng)論請(qǐng)先 登錄
人形機(jī)器人“靈巧手”,正在接近27個(gè)自由度的人手

復(fù)合機(jī)器人機(jī)械結(jié)構(gòu)設(shè)計(jì)與創(chuàng)新:智能制造的前沿技術(shù)與發(fā)展趨勢(shì)

工業(yè)級(jí)霍爾搖桿方案:多場(chǎng)景精準(zhǔn)控制解析
中科院上海硅酸鹽所/新加坡國(guó)立大學(xué):研發(fā)多自由度高靈敏柔性壓離子傳感器
SCH16T-K01:高性能6自由度傳感器的技術(shù)剖析與應(yīng)用指南
人形機(jī)器人市場(chǎng)火爆!雷賽智能重磅推出“20自由度”靈巧手方案
EtherCAT?技術(shù)前瞻:人形機(jī)器人通信的新選擇!
多自由度云臺(tái)控制系統(tǒng)賦能安防監(jiān)控的智能巡檢與目標(biāo)鎖定
不到萬(wàn)元!智元機(jī)器人高自由度靈巧手做到了

EtherCAT科普系列(17):EtherCAT技術(shù)在多自由度 3D 打印領(lǐng)域應(yīng)用

中國(guó)成功研發(fā)蚊子大小仿生機(jī)器人
十字形多自由度超聲電機(jī)接觸分析模型研究
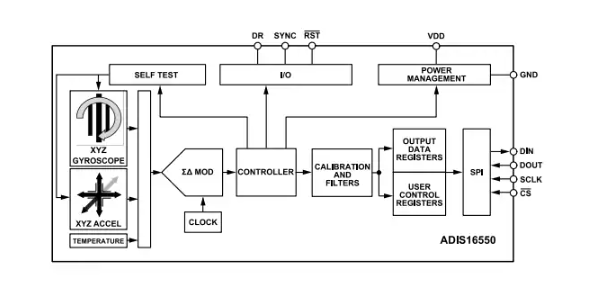
Analog Devices Inc. ADIS16550六自由度慣性傳感器數(shù)據(jù)手冊(cè)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
如何制作和控制一只仿生手




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論