 EtherCAT科普系列(17):EtherCAT技術在多自由度 3D 打印領域應用
EtherCAT科普系列(17):EtherCAT技術在多自由度 3D 打印領域應用

3D打印技術即三維快速成型打印技術,是一種新型增材制造方式。區別于傳統的“減材制造技術”,3D 打印通過數字化模型離散目標實體模型,再通過材料層層堆疊方法,逐漸累積出一個目標三維實體的技術。該技術在不使用傳統復雜的刀具或模具的情況下,使用熔融材料堆疊成具有復雜的傳統工藝難以實現的結構,相較于傳統切削加工鑄造技術,具有節約材料、耗時短、提高設計自由度等優勢,被譽為“第三次工業革命”的核心技術之一。 3D打印機是 3D打印的核心設備,在 3D打印過程中起到實體模型獲取、3D打印數據資料生成、控制 3D打印材料堆疊等作用。具體工作流程是:①通過計算機三維建模或三維掃描技術獲取實體模型;②使用計算機分層軟件將實體模型分層產生數據資料,再將數據文件傳輸 3D 打印機;③打印機根據指令驅動打印噴頭/激光器按照預定預設路徑進行擠出材料/激光燒結,形成固化平面層,如此循環往復,逐漸堆疊成目標實體。
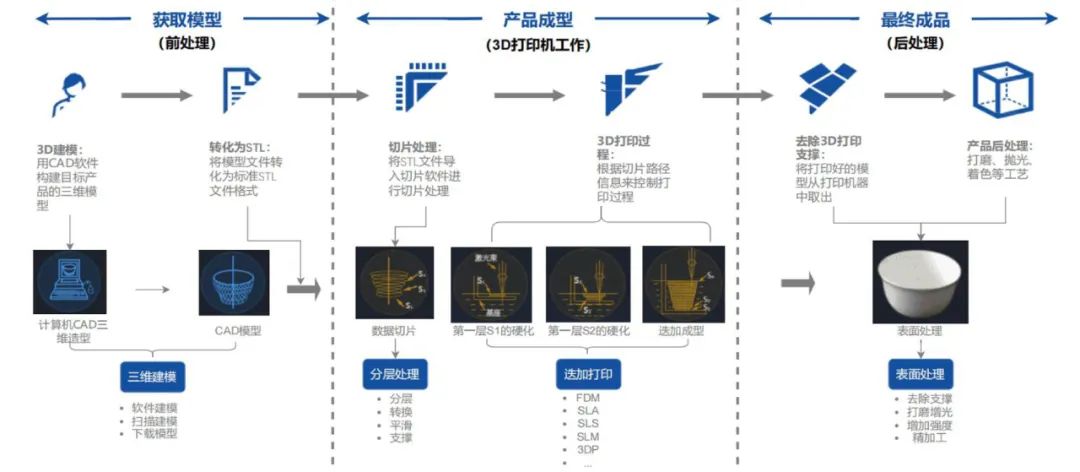
▲3D 打印流程(來源:億渡數據)
3D打印技術目前已被廣泛應用于航空航天、汽車、醫療、消費品等領域,并且不斷拓寬應用邊界如人形機器人、無人機、飛行汽車等。
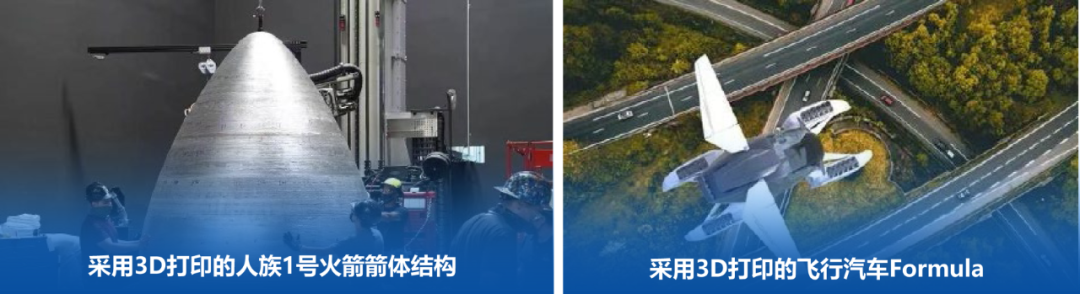
▲3D打印應用案例(來源:OFweek)
全球3D打印市場規模不斷增長,根據從事增材制造行業研究的機構 Wohlers Associates 統計顯示,全球增材制造產值從2015年的51.65億美元增長到2023 年的200億美元左右,2015-2023年3D打印市場規模CAGR約為18.46%。按需數字制造提供商Protolabs預測2030年全球3D打印市場空間有望達到883億美元。中商情報網數據顯示2023年中國3D打印產業規模達到367億元,同比增長14.69%,前瞻產業研究院預計2024-2029年中國3D打印產業規模將持續高速增長預計2029年中國3D打印市場規模將超1200億元,2024-2029年CAGR約為19.5%。3D打印目前有七大類主流工藝路線,包括粉末床熔融、定向能量沉積、立體光固化、粘結劑噴射、材料擠出、材料噴射和薄材疊層,各工藝類別下還包括不同的子工藝。FDM(熔融沉積)3D打印工藝,通過控制 3D打印機噴頭在XYZ 笛卡爾3軸方向上擠出經過加熱的熔融材料進行層層堆積,最終打印成型。該打印方式具有成本低、耗材多樣及不產生化學變化、綠色健康等優點,是目前市場中最常見的 3D打印技術。但其仍具有以下幾個問題:
(1)對于具有懸垂結構的模型,需要打印支撐,這造成了材料和時間上的浪費,降低了生產效率;
(2)由于層層堆積的生產方式,模型表面必定存在階梯效應,導致表面質量較差。以上問題一定程度上限制了 3D 打印技術的發展與市場推廣,而通過拓展打印的成型自由度,實現從平面垂直堆疊到曲面多方向成型,可以有效減少或消除支撐所帶來的材料浪費,削減階梯效應所導致的模型表面質量降低問題。將多軸機械臂作為載體,3D打印噴頭機構裝于空間末端支持多方向運動,是增加成型自由度的主要方法,其能夠改變傳統 3D打印層層堆積的打印方式,實現曲線、曲面打印,解決因為打印支撐所導致的材料、時間浪費問題。根據 Market Research future 的研究,2022年3D打印機器人市場規模預計為10.6 億美元,而該市場預計將從 2023年的13.6億美元增長至2032年的130 億美元。
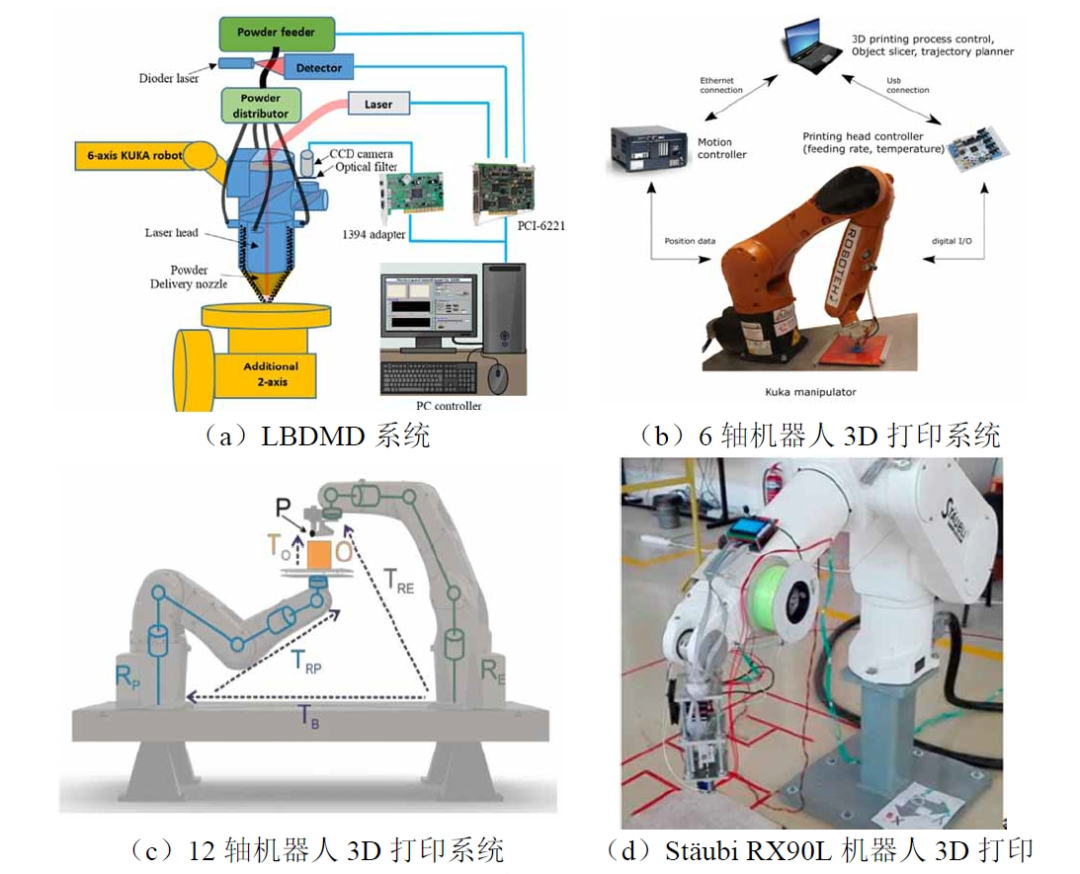
▲各類機器人3D打印方式(來源:CNKI)
自由度的擴展,帶來的是需要更多運動機構與工藝實施機構的協調工作,而滿足多工藝參數實時性和同步性的控制系統是高質量多自由度 3D打印實現的前提。因此,需要一種解決方法整合機械臂 3D打印中各工藝機構在控制上的協同性,并保證各工藝機構間的協同控制精度,提高多軸機械臂 3D打印的最終成型質量。EtherCAT是出德國 Beckhoff公司基于Fast Lightbus 現場總線系統提出的一種實時工業以太網通信協議,目前已經獲得我國以及眾多國際制造業企業的認同。EtherCAT因其具有傳輸速度快、同步性能好、拓撲結構靈活等特點,近年來,被越來越多地應用于如多軸伺服控制系統、多機器人協同控制系統等分布式網絡控制場景。通過引入EtherCAT 實時工業以太網提高主控上位機與下層執行機構的通信實時性和各機構響應同步性,提高3D打印的控制精度,從而實現實現多自由度 3D 打印。
機器人 3D 打印控制系統整體架構
機器人3D打印控制系統基于EtherCAT 總線設計,利用其良好的主從通信實時性能與從站間精確的時鐘同步,能夠保證打印系統對于各機構控制數據的同步下發與及時反饋,而為進一步確保各打印機構行使其對應功能,并在運行過程中協同配合。典型的機器人3D打印控制系統由用戶層,協議層,傳輸層,物理層及硬件層組成,其中用戶層協議層、傳輸層及物理層均在主控PC中實現,硬件層由 EtherCAT 物理總線、打印機主板從站及機械臂從站組成。
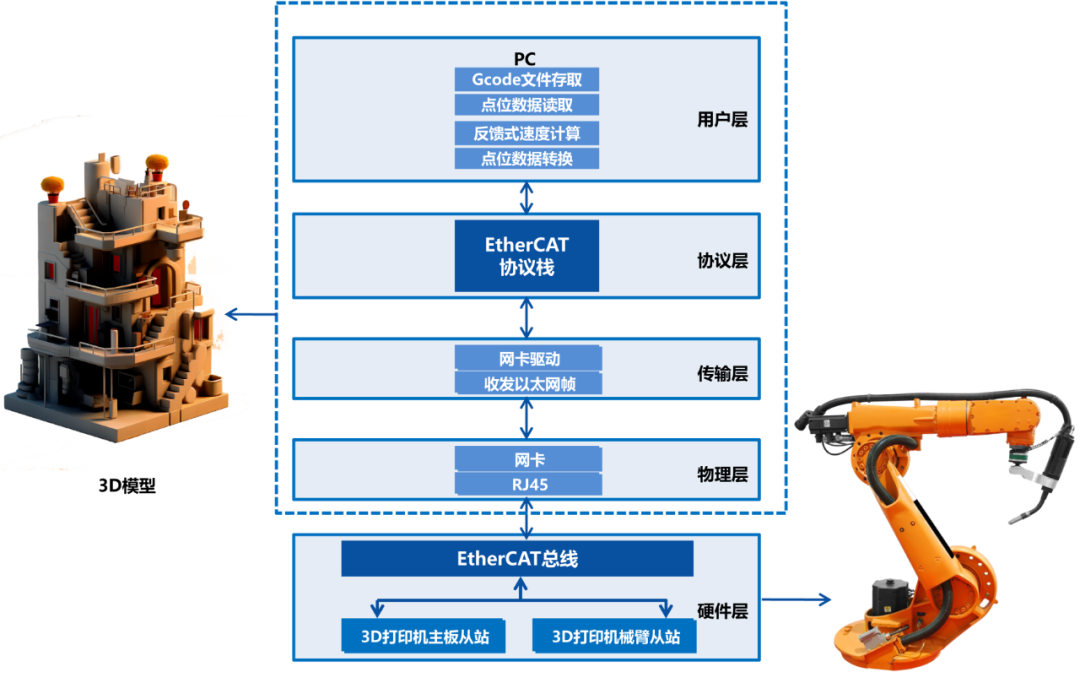
▲典型的機器人3D打印控制系統框架
用戶層主要指 EtherCAT主站中各應用層功能程序,包括與GCODE文件的交互,讀取并解析打印路徑命令,反饋式擠料速度控制以及將所有解析及計算結果存入邏輯地址的數據轉換功能。協議層指EtherCAT主站中的協議棧,其將用戶層邏輯地址中的相關數據與下層傳輸層對接。傳輸層及物理層則負責將通信過程數據以以太網幀的形式進行發送與接收,硬件層主要分為3D打印主板從站與機械臂從站,兩從站基于各自的獨立芯片分別控制擠出機構、剪切機構、溫度機構以及機器人等功能模塊。
3D打印機機械臂從站系統
機器人運動機構作為機器人3D打印系統中承擔噴頭空間運動的關鍵機構,其控制的實時性及準確性關乎最終成型件的整體質量機構。
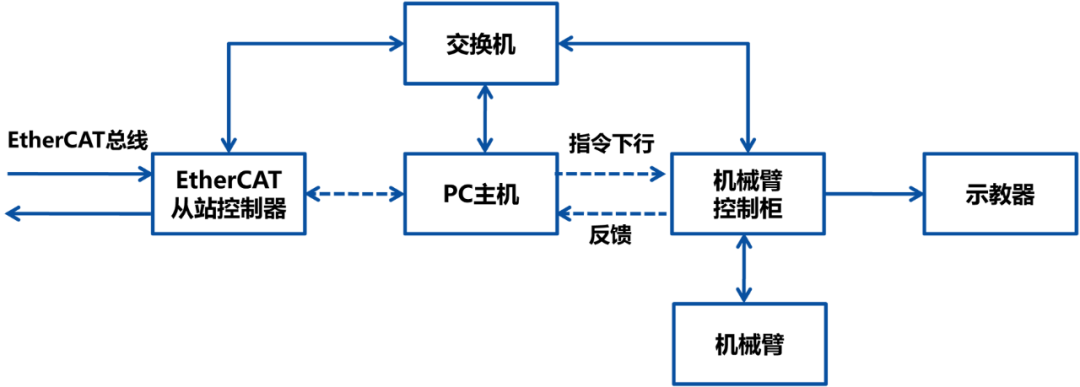
▲典型3D打印機機械臂從站系統構成
典型的3D打印機機械臂從站硬件組成包括搭載 EtherCAT 從站控制器的網關模塊、PC 主機、機械臂控制柜、機械臂本體、示教器以及一個交換機,各控制模塊間采用交換機進行串聯。在機械臂從站中,PC主機作為網關模塊與機械臂控制柜的中間模塊,負責將EtherCAT從站控制器所接收到的EtherCAT總線信息作中間處理,再下發到機械臂控制柜中,以及相關反饋數據的回傳。示教器是進行機械臂手動操作、應用調試、程序編寫、參數配置及狀態監控的手持裝置,在機械臂從站中,通過在其上編寫自動運行的控制程序,配合PC主機工程工作,實現機械臂點位的連續運動規劃。
3D 打印機主板從站系統
機器人3D 打印控制系統中 3D 打印主板作為一個EtherCAT 從站,配合專用內 EtherCAT 從站控制器,接入 EtherCAT 網絡,是打印系統中的一個重要組成部分,其負責提供底層擠料機構、溫度控制機構、剪切機構以及工作平臺旋轉機溝的控制功能。
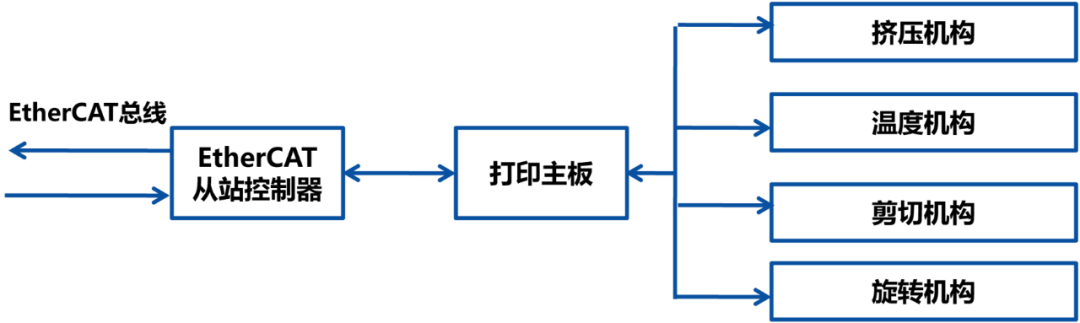
▲典型的 3D 打印主板從站硬件構成
3D 打印機主板控制模塊
在機器人3D打印控制系統中,3D打印主板主要由主控 MCU、電源電路、外部晶振電路、復位電路及固件燒錄接口組成最小系統,在此基礎上使用溫度傳感器,配合溫度轉換電路及MCU內部 AD采樣單元,實現噴頭及打印底床溫度的實時獲取。并通過加熱電路及風扇驅動電路,依據所采集到的溫度值及 控制算法,維持噴頭及底床溫度的穩定。步進電機驅動分別控制擠出機構、剪切機構及底床旋轉機構,其中旋轉電機負責底床的平面旋轉,反轉電機負責底床的側向反轉,方便實現模型的多方向沉積。通信接口采用與從站核心板對應的 SPI方式,將MCU接入EtherCAT網絡,實現數據互通。
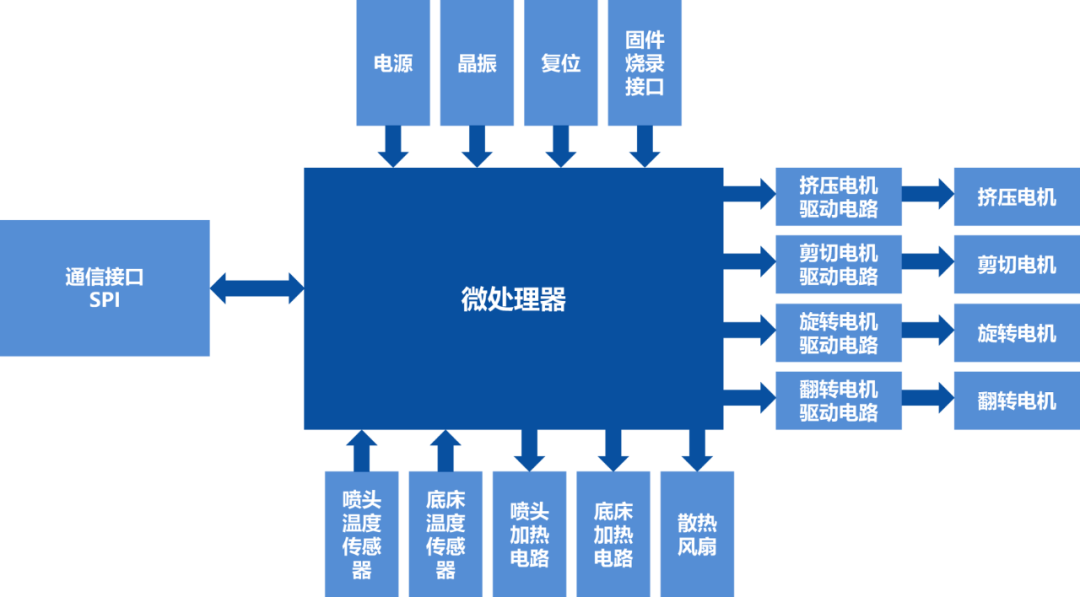
▲典型3D 打印機主板控制模塊結構
3D 打印機主板通信模塊
3D 打印機主板通信模塊搭載專用的從站控制器(ESC),配合物理層芯片 PHY 以及RJ45 物理網口實現 3D 打印主板從站 EtherCAT通信中的物理層及數據鏈路層功能。其核心是從站控制器 ESC 芯片,主要負責 EtherCAT 網絡中主從站間的協議處理。ESC 芯片向外提供多種 PDI接口,主要分為直接輸入輸出信號接口和DPRAM 數據接口兩種,其中直接輸入輸出信號接口不通過下層微處理器,直接輸出邏輯 IO信號,DPRAM 數據接口一般需要在 ESC 下層接入具有運算能力的為控制器(MCU),分別為SPI、 8/16 位異步并行接口以及 8/16 位同步并行接口,其中 SPI方式在連接與應用上相對簡潔方便,故3D 打印主板從站控制模塊與通信模塊之間選用 SPI 方式建立通信。除 SPI通信總線外,還包括用于 DC 同步模式的 SYNC信號線以及電源線等。

▲典型3D 打印機主板通信模塊結構
碼靈半導體機器人 3D 打印系統解決方案
碼靈半導體推出的CF110x系列為EtherCAT從站控制器芯片可通過一主多從的分布式架構將包括機械臂、擠出機構、溫度控制機構等跨平臺功能模塊并入一套控制系統中,實現多自由度 3D 打印,滿足機器人3D打印控制系統中對于各機構控制的實時性及同步性需求。 ▲碼靈半導體CF110x系列芯片實物圖
▲碼靈半導體CF110x系列芯片實物圖
碼靈半導體CF110x系列可提供3個EtherCAT 數據收發端口,能夠與其他從站 ESC 組成拓撲結構靈活的EtherCAT網絡。提供多個通用 IO 擴展,用于簡單 IO設備控制,同時具有多種外部通信方式,可連接微處理器實現較為復雜的從站功能,包括串行通信方式,如 SPI 通信;并行通信方式,如 FSMC 等。
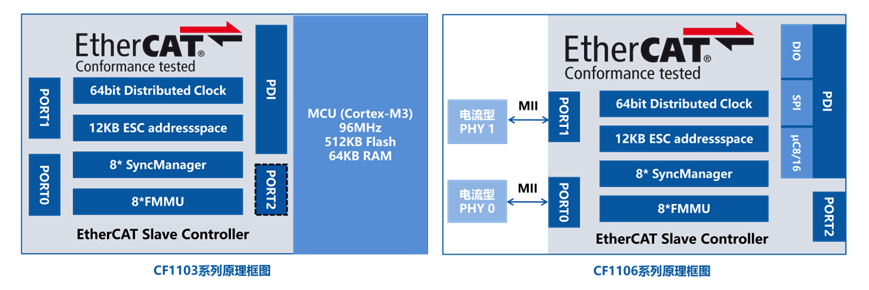
▲碼靈半導體CF110x系列芯片結構框圖
CF110x系列ESC提供4KB寄存器空間、8KB過程數據存儲空間。此外,還包含8個現場總線管理單元(FMMU)用于負責實現從站物理地址到主站邏輯地址的空間映射,提高通信效率。內置8個用于多從站同步的 SyncManager 管理器和64位 DC分布式時鐘,保證了數據傳輸的安全性及通信過程中的一致性。CF110x系列在機器人3D打印系統中的應用優勢特點:產品獲得德國倍福公司(Beckhoff)官方正式授權,已通過ETG官方的一致性測試認證,符合EtherCAT通信協議標準;內置8個現場總線內存管理單元(FMMU)、8個同步管理器(SM),產品支持三種數據接口(PDI)-數字I/O,SPI和8/16 位uC接口;內置64位分布式時鐘(DC),可實現EtherCAT從站的高精度同步(<< 1μs);可選擇性集成32位ARM Cortex-M3內核微控制器(MCU)或2個電流型PHY(兼容100BASE-TX),具有抗干擾能力強、信號完整性高和穩定性好的優點;多種封裝形式可選,支持QFN64L(9x9mm)、QFN88L(10x10mm)、QFN100L(12x12mm)封裝。碼靈半導體推出的CF110x系列EtherCAT從站控制器芯片可保證機器人多自由度3D 打印控制系統中主從站間數據通信的實時與同步性能,實現基于機器人與擠料剪切等其他工藝機構的跨平臺協同控制。
-
ethercat
+關注
關注
20文章
1555瀏覽量
45877 -
3D打印
+關注
關注
28文章
3648瀏覽量
118609
發布評論請先 登錄



 工商網監
工商網監
評論