") 有刷 / 無刷 / 步進 / 伺服電機分別對應(yīng)什么驅(qū)動芯片?
有刷 / 無刷 / 步進 / 伺服電機分別對應(yīng)什么驅(qū)動芯片?

搞硬件的朋友都知道,選電機只是第一步,真正讓人頭大的是——驅(qū)動芯片怎么配?
有刷電機兩根線,是不是隨便找個電機驅(qū)動就能用?無刷電機要三相驅(qū)動,步進電機要細分,伺服電機要閉環(huán)……市面上驅(qū)動芯片五花八門,到底哪一類才是自家電機的“真命天芯”?
有刷直流電機 → 對應(yīng)H橋驅(qū)動芯片
電機畫像
有刷電機結(jié)構(gòu)簡單,兩根線,通電能轉(zhuǎn),換向靠電刷。成本低、控制容易,至今仍在電動玩具、汽車車窗、電動牙刷里大量使用。
驅(qū)動芯片長啥樣
有刷電機需要的驅(qū)動芯片,核心是一個或兩個H 橋(全橋電路)。H 橋的作用就是改變電流方向,實現(xiàn)正反轉(zhuǎn),同時通過 PWM 調(diào)節(jié)電壓來控制轉(zhuǎn)速。
這類芯片通常叫直流電機驅(qū)動器或DC 電機驅(qū)動器。它們內(nèi)部集成了MOSFET 和控制邏輯,有些還帶電流檢測、過流保護、堵轉(zhuǎn)檢測等功能。
選型要點
工作電壓和電流要覆蓋電機需求
是否支持 PWM 調(diào)速
需不需要電流檢測(用于堵轉(zhuǎn)或力矩控制)
封裝和功耗是否適合產(chǎn)品形態(tài)
無刷直流電機 → 三相全橋驅(qū)動芯片+柵極驅(qū)動芯片
電機畫像
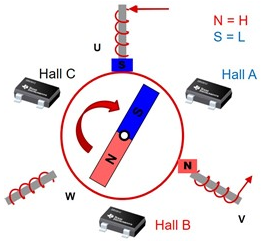
無刷電機去掉了電刷,壽命長、效率高、噪音低,是無人機、風(fēng)扇、電動工具、水泵的標配。但控制復(fù)雜,需要根據(jù)轉(zhuǎn)子位置依次給三相線圈通電。
驅(qū)動芯片長啥樣
無刷電機的驅(qū)動芯片分兩類:
集成 MOSFET 的三相驅(qū)動器
內(nèi)部集成了三相全橋和驅(qū)動邏輯,直接接電機就能用。適合中小功率、對 PCB 面積敏感的場景。
柵極驅(qū)動器+ 外置 MOSFET
芯片只負責驅(qū)動邏輯和電平轉(zhuǎn)換,功率MOSFET 外置。好處是功率范圍靈活,小到貼片 MOS,大到 TO-220 都能搭,適合大電流或?qū)掚妷盒枨蟆?/span>
選型要點
是否支持 FOC(磁場定向控制)——FOC 需要高精度電流采樣和復(fù)雜算法
電壓和電流等級
保護功能(過流、欠壓、堵轉(zhuǎn)等)
步進電機 → 步進電機專用細分驅(qū)動芯片
電機畫像
步進電機是開環(huán)位置控制的代表,給一個脈沖走一步,定位精準,廣泛應(yīng)用于3D 打印機、雕刻機、醫(yī)療泵、自動化儀表。但天生有共振、發(fā)熱、高速力矩衰減的問題。
驅(qū)動芯片長啥樣
步進電機驅(qū)動器是專門為兩相步進電機設(shè)計的,核心功能包括:
微步細分:把一個整步細分成多個微步,讓轉(zhuǎn)動更平滑,減少共振
電流控制:調(diào)節(jié)線圈電流,影響力矩和發(fā)熱
靜音技術(shù):通過優(yōu)化電流波形,降低電機噪音
堵轉(zhuǎn)檢測:有些芯片能檢測電機是否卡住
這類芯片通常內(nèi)置兩個 H 橋(對應(yīng)兩相),加上電流調(diào)節(jié)邏輯,通過 STEP/DIR 接口接收脈沖信號。
選型要點
微步細分能力(1/16、1/32、1/256 等)
電流能力(峰值電流、RMS 電流)
是否帶靜音功能(對噪音敏感的應(yīng)用很重要)
有沒有節(jié)能模式(自動降流,減少發(fā)熱)
需不需要編碼器接口(用于閉環(huán)步進)
伺服電機 → 對應(yīng)伺服級閉環(huán)驅(qū)控一體芯片
電機畫像
伺服電機是運動控制的“頂配”,自帶編碼器反饋,時刻知道自己的位置、速度、力矩,并進行閉環(huán)調(diào)整。工業(yè)機器人、數(shù)控機床、協(xié)作機器人里少不了它。
驅(qū)動芯片長啥樣
伺服驅(qū)動器是一個復(fù)雜的系統(tǒng),通常由三部分構(gòu)成:
伺服控制器:負責跑FOC 算法、PID 調(diào)節(jié)、讀取編碼器數(shù)據(jù)
柵極驅(qū)動器:把控制器的PWM 信號轉(zhuǎn)換成能驅(qū)動 MOSFET 的高壓信號
功率級:三相MOSFET 橋,直接驅(qū)動電機
現(xiàn)在很多廠商把伺服控制器做成了專用 IC,內(nèi)部用硬件實現(xiàn)矢量控制,響應(yīng)速度極快,不占用主控資源。這類芯片通常有豐富的編碼器接口(絕對值、增量、正余弦等),能直接輸出 PWM 給后級驅(qū)動。
選型要點
支持哪種編碼器(ABZ、BiSS、EnDat、霍爾等)
控制模式(位置、速度、力矩)
算法是否硬件化(硬件 FOC 比軟件快得多)
與后級驅(qū)動的接口是否方便
電壓和功率范圍(由外置 MOSFET 決定)
選型小技巧:先確定電機類型,再根據(jù)電機的電壓、電流參數(shù),匹配對應(yīng)拓撲結(jié)構(gòu)的驅(qū)動芯片,最后結(jié)合應(yīng)用場景的精度、噪音需求,選擇是否需要集成細分、FOC、閉環(huán)控制等功能即可。
如有電機驅(qū)動芯片型號選型、方案適配等需求,歡迎聯(lián)系我們,卓聯(lián)微專業(yè)技術(shù)團隊將為您提供定制化解決方案,助力您的項目快速落地。
-
步進
+關(guān)注
關(guān)注
1文章
27瀏覽量
16193 -
伺服電機
+關(guān)注
關(guān)注
88文章
2193瀏覽量
61429 -
驅(qū)動芯片
+關(guān)注
關(guān)注
14文章
1666瀏覽量
58049
發(fā)布評論請先 登錄
基于Motionchip的直流無刷伺服電機運動控制系統(tǒng)設(shè)計
如何選擇正確的FET來驅(qū)動有刷、無刷和步進電機
硬件FOC伺服控制芯片TMC4671適應(yīng)永磁同步伺服/直流無刷伺服/直流有刷伺服/閉環(huán)步進/音圈電機
XC4 PWM數(shù)字驅(qū)動器適用于無刷直流、有刷直流、音圈和步進電機

無刷直流電機的優(yōu)勢及工作原理
有刷電機驅(qū)動,橋驅(qū)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論