 新能源產線中,發那科機器人通過協議轉換網關與EtherCAT運動控制卡協同作業實例
新能源產線中,發那科機器人通過協議轉換網關與EtherCAT運動控制卡協同作業實例


一、項目背景
在新能源鋰電池電芯裝配車間,某企業引入發那科M-10iA系列機器人負責極片搬運與堆疊工序,該機器人采用EtherNet/IP協議作為從站設備,需接收核心控制系統的實時指令。車間主控制系統采用基于EtherCAT協議的運動控制卡(倍福CX5140)作為主站,承擔全產線的同步協調任務。由于兩種設備分屬不同協議體系(EtherNet/IP側重設備級通訊,EtherCAT專注高精度運動控制),存在天然的協議壁壘,導致機器人動作指令響應延遲、位置控制精度不足等問題,嚴重影響電芯堆疊的一致性(要求±0.02mm誤差)。經技術選型,最終采用遠創智控YC-EIPM-ECT智能網關構建跨協議通訊鏈路,實現運動卡對機器人的精準控制與數據采集。
二、項目痛點
1.協議體系:EtherCAT運動卡的實時控制幀(周期≤1ms)無法直接被EtherNet/IP機器人識別,傳統通過PLC中轉的方案導致指令延遲達80-120ms,造成極片堆疊錯位率超過3%。
2.同步精度不足:缺乏分布式時鐘同步機制,機器人抓取與傳送帶定位的時間偏差超過5ms,引發極片碰撞損耗,日均材料浪費成本超2000元。
3.惡劣環境干擾:車間存在高頻焊接設備產生的電磁干擾,普通轉換設備通訊丟包率達2.3%,導致機器人偶發停機,月均影響生產工時超16小時。
4.運維效率低下:設備故障需技術人員現場排查,平均響應時間超4小時,且缺乏數據追溯能力,無法快速定位是控制指令錯誤還是執行機構問題。
5.系統擴展受限:原有架構難以接入新增的質檢傳感器,需重新部署獨立通訊鏈路,增加了系統復雜度與成本。
三、遠創智控YC-EIPM-ECT協議網關功能簡介
作為整合工業網關核心特性與物聯網網關擴展能力的專業設備,YC-EIPM-ECT具備以下關鍵功能:
1.雙協議轉換核心:作為EtherNet/IP主站可掃描并管理發那科機器人從站設備(支持125-1000Mbps自適應),同時作為EtherCAT從站接入運動卡主站系統,實現雙向數據實時轉換(輸入輸出各支持256字節),轉換延遲≤50μs。
2.邊緣計算能力:內置邊緣計算網關模塊,支持本地數據預處理,可實現:
機器人位置指令的平滑濾波(消除高頻抖動)
異常值剔除(如極片抓取壓力異常值)
本地報警邏輯(關節溫度超閾值時觸發急停)
3.智能運維管理:作為智能網關提供豐富的診斷功能,包括:
通訊狀態實時監控(丟包率、延遲時間)
設備在線狀態指示與歷史記錄
支持通過以太網遠程配置參數與固件升級
4.工業級可靠性:符合數據采集器的嚴苛要求,采用:
寬溫設計(-40~85℃)與24VDC冗余供電
雙以太網端口支持鏈路冗余
抗電磁干擾認證(EN61000-6-2)
5.時鐘同步機制:支持EtherCAT分布式時鐘(DC),與運動卡的同步誤差≤1μs,確保多設備協同精度。
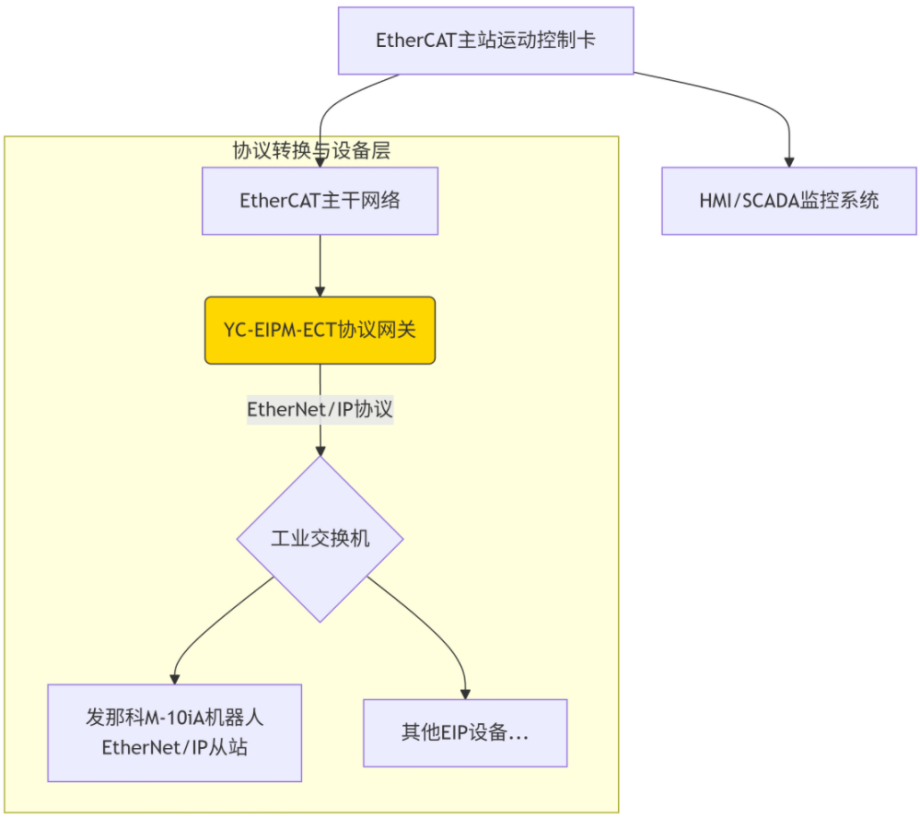
四、系統結構拓撲圖
五、解決方案描述
1.協議無縫橋接:網關作為EtherCAT從站接入運動卡主站,通過ESI文件配置實現PDO映射(將機器人控制字映射至EtherCAT輸出區0x0000-0x001F);同時作為EtherNet/IP主站,采用顯式報文配置機器人輸入輸出Assembly對象(實例100/150),實現控制指令與狀態數據的雙向傳輸。
2.實時同步優化:啟用網關的分布式時鐘功能,將EtherCAT主站時鐘同步至機器人控制系統,使運動卡的位置指令與機器人執行機構的時間偏差控制在±1ms內,滿足極片堆疊的高精度要求。
3.邊緣智能處理:利用邊緣計算網關功能在本地實現:
指令插值運算(將運動卡的粗粒度指令轉換為機器人可執行的精細路徑)
數據壓縮傳輸(僅上傳關鍵生產數據至MES,減少帶寬占用30%)
異常工況判斷(當抓取力<5N時自動觸發重試機制)
4.抗干擾部署:采用物聯網網關的布線規范,EtherCAT總線使用雙絞屏蔽線(阻抗100Ω),兩端配置75Ω終端電阻;網關安裝于遠離焊接設備的獨立控制柜,通過光纖收發器延長通訊距離至50米。
六、實施過程
1.前期準備
設備參數確認:獲取發那科機器人EtherNet/IP從站地址(192.168.1.10)、輸入輸出Assembly映射表;確認運動卡的EtherCAT周期(1ms)與PDO分配策略。
配置文件準備:導入網關GSDML文件至TwinCAT工程,加載機器人EtherNet/IP設備描述文件。
2.硬件部署
網關安裝:采用35mm導軌固定于運動卡控制柜內,連接PE保護地。
布線實施:
EtherCAT鏈路:運動卡X6端口→網關ECTIN端口(屏蔽層單端接地)
EtherNet/IP鏈路:網關EIPOUT端口→機器人控制箱X4端口(CAT6A屏蔽網線)
供電配置:接入24VDC冗余電源(18-30V),確保與PLC共地。
3.參數配置
網關配置:通過YC-Tool軟件設置:
EtherCAT側:從站地址0x0A,PDO輸入32字節(機器人狀態),輸出32字節(控制指令)
EIP側:掃描機器人設備,設置輸入輸出長度各32字節,通訊周期20ms
邊緣規則:關節位置偏差>0.1mm時觸發報警
運動卡編程:在TwinCAT中編寫映射程序,將機器人控制指令關聯至%Q1000.0-%Q1007.7寄存器。
9.聯調測試
功能測試:驗證啟動/停止、位置指令、速度調節等基礎控制功能
性能測試:連續1000次循環測試,記錄指令響應延遲≤300μs
壓力測試:模擬電磁干擾環境,監測72小時通訊丟包率<0.01%
七、應用效果
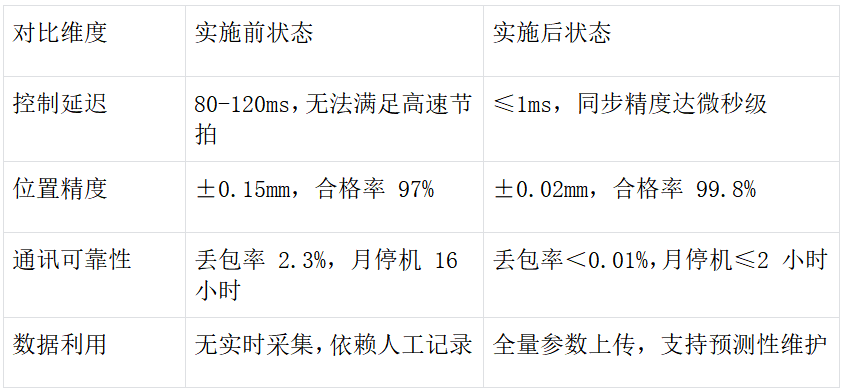
1.控制精度提升:機器人位置控制誤差從±0.15mm降至±0.02mm,極片堆疊合格率從97%提升至99.8%,日均減少材料浪費成本1800元。
2.響應速度優化:指令傳輸延遲從80ms壓縮至≤1ms,滿足電芯裝配的高速節拍需求(產線速度提升20%)。
3.運維效率改善:通過智能網關的遠程診斷功能,故障排查時間從4小時縮短至30分鐘,月減少停機工時14小時。
4.數據價值挖掘:數據采集器功能實現機器人運行參數(如關節溫度、負載電流)的實時上傳,為predictivemaintenance提供數據支撐,設備平均無故障時間(MTBF)延長30%。
5.擴展能力增強:網關支持最多8個EtherNet/IP從站設備,后續新增的視覺檢測傳感器可直接接入,無需額外配置。
八、項目實施前后效果對比
九、主流前景行業推薦
1.新能源電池制造:在疊片機、封裝機等設備中,工業網關可實現Profinet控制系統與EtherCAT伺服的實時協同,提升電池一致性。
2.生物醫藥制劑:在無菌灌裝生產線中,智能網關可保障PLC與EtherCAT灌裝設備的穩定通訊,符合GMP對數據追溯的嚴苛要求。
十、總結
本方案通過遠創智控YC-EIPM-ECT協議網關的多重核心能力——工業網關的協議轉換、邊緣計算網關的本地智能、物聯網網關的互聯擴展、智能網關的運維優化以及數據采集器的信息挖掘,成功破解了新能源制造中EtherNet/IP與EtherCAT的協議壁壘。實施后不僅帶來了顯著的生產效率提升和成本降低,更構建了基于數據驅動的設備管理新模式。隨著工業4.0的深入推進,此類多協議融合技術將成為智能制造的核心基礎設施,在新能源、半導體等高端制造領域發揮關鍵作用,推動工業通訊從"兼容互通"向"智能協同"的跨越式發展。
《具體內容配置過程及其他相關咨詢請與武工留言交流》
審核編輯 黃宇
-
新能源
+關注
關注
27文章
6595瀏覽量
113586 -
機器人
+關注
關注
213文章
30665瀏覽量
220040 -
網關
+關注
關注
9文章
6488瀏覽量
55717 -
運動控制卡
+關注
關注
7文章
128瀏覽量
16054 -
ethercat
+關注
關注
19文章
1400瀏覽量
43703
發布評論請先 登錄
【正運動】高速高精,超高實時性的PCIe EtherCAT實時運動控制卡 | PCIE464
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
【TL6748 DSP申請】基于DSP的四自由度機器人運動控制卡的研究
發那科機器人搬運程序實例
發那科機器人系統回收 發那科機器人配件常年高價回收
EtherCAT運動控制卡之ECI2820如何使用
profinet轉ethernet網關連接發那科機器人配置案例
EPR6-S工業機器人通過EtherCAT轉profinet網關接入西門子系統
MINIPCIE1016EH EtherCAT運動控制卡用戶手冊
EtherNetIP轉Profinet網關連接發那科機器人配置實例解析

EtherCAT轉EtherNet/IP協議轉換網關實現歐姆龍 NJ PLC與發那科機器人連接通訊的配置案例

技術革新,EtherCAT轉CAN網關,新能源汽車電池產線再升級

顛覆智造:profinet轉ethernet ip網關×發那科×西門子的三國殺

ProfiNet 轉 Ethernet/IP 網關解決方案:破解頭部電池企業S7-1215C與M-20iA機器人通信壁壘

發那科機器人借助EtherNet/IP轉EtherCAT網關,實現與EtherCAT運動卡的高效互聯案例





 工商網監
工商網監
評論