 利用NVIDIA Omniverse Extension開發FreeD定位系統
利用NVIDIA Omniverse Extension開發FreeD定位系統

1什么是 FreeD 定位系統
FreeD 定位系統(通常稱為 FreeD 協議)是一種業界廣泛應用的攝像機追蹤數據通信協議,主要用于虛擬演播室(AR/VR)、電影虛擬制作等實時追蹤場景。在很多工業數字軟生項目中也有類似接收發送數據協同的需求,可以參考下面的流程作參考。
FreeD 主要傳遞包括攝像機三維位置(XYZ)、旋轉(Pitch、Yaw、Roll)、鏡頭參數(焦點、變焦)。
我們采取的協議包含 29 個字節的數據,其 FreeD 發送的定位設備一般是一個獨立于攝影機的組件,其實現原理大致分為紅外定位點,雙目攝像頭,多攝像頭等。包括著名的 Mosys、Redspy、HTC Vive Mars 等。FreeD 是一個通用的定位協議,常見的定位系統默認都支持 FreeD 協議。
2開始開發
首先創建一個插件,命名為omni.freed.livelink。具體步驟可參考:《NVIDIA Omniverse Extension 開發秘籍:Python/C++ 實戰,附完整代碼》
2.1 背景分析
首先找到 FreeD 的定義文檔,并且分析其協議 (https://www.manualsdir.com/manuals/641433/vinten-radamec-free-d.html?download),然后根據協議在 Omniverse Extension 編寫接收協議,且實時更新 Omniverse USD 的 Camera,讓 Omniverse 的 Camera 跟隨外部的相機定位系統實時同步更新,實現數字孿生效果。
*注:文本下面需要用到很多計算機編程開發的基礎知識。
2.2 開發解析
2.2.1 端口創建
FreeD 協議基于 UPD 協議傳輸,一般默認是廣播方式,接收的端口是 40000 (可以在相機定位設備里更改端口,或者進行點對點傳輸)。

_startUPDServe函數里面創建 Socket 端口(或者使用已有框架比如 python-osc)

2.2.2 協議解析
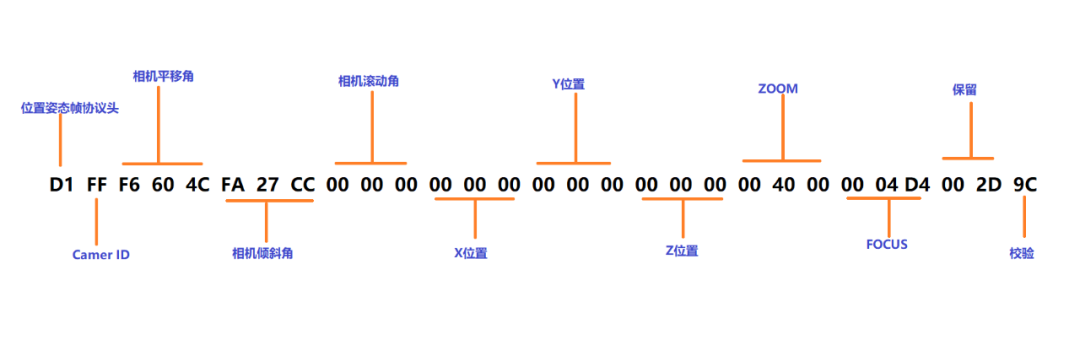
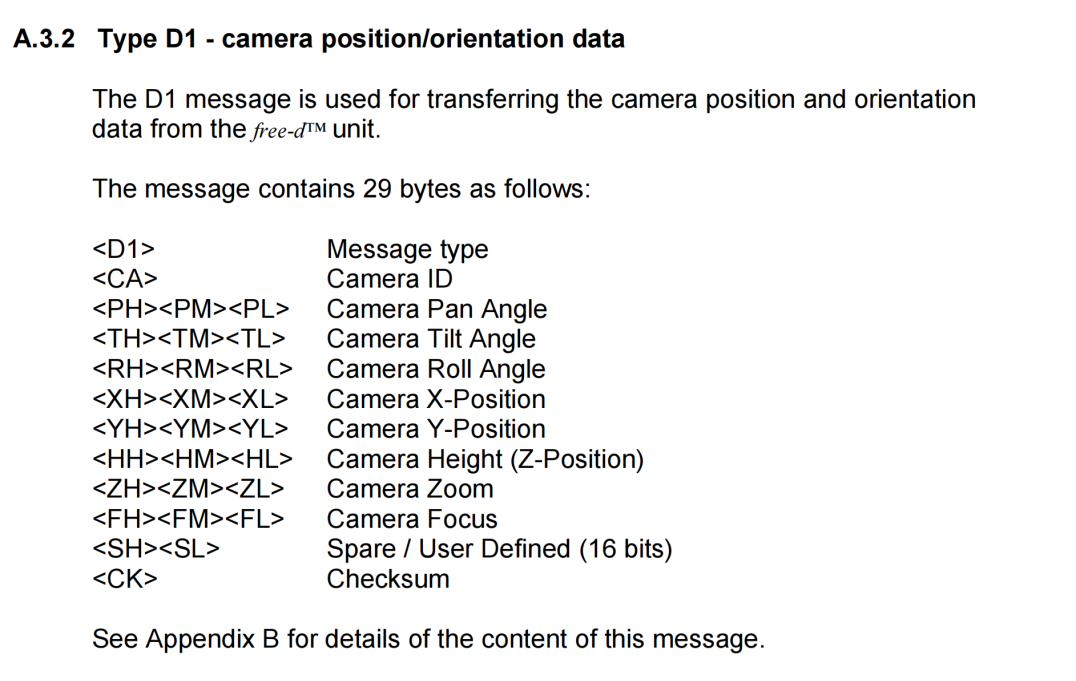
分析 FreeD 的協議,通用 FreeD 采用的是 Type D1 的數據格式,接收 29 個 Bytes。在文檔的第 30 頁,根據指引“Appendix”去看第 40 頁。
FreeD字段說明
再通過下圖更直觀地表達 FreeD 的 29 個字節所,按照文檔計算 Pan, Tilt, Roll 的數值。
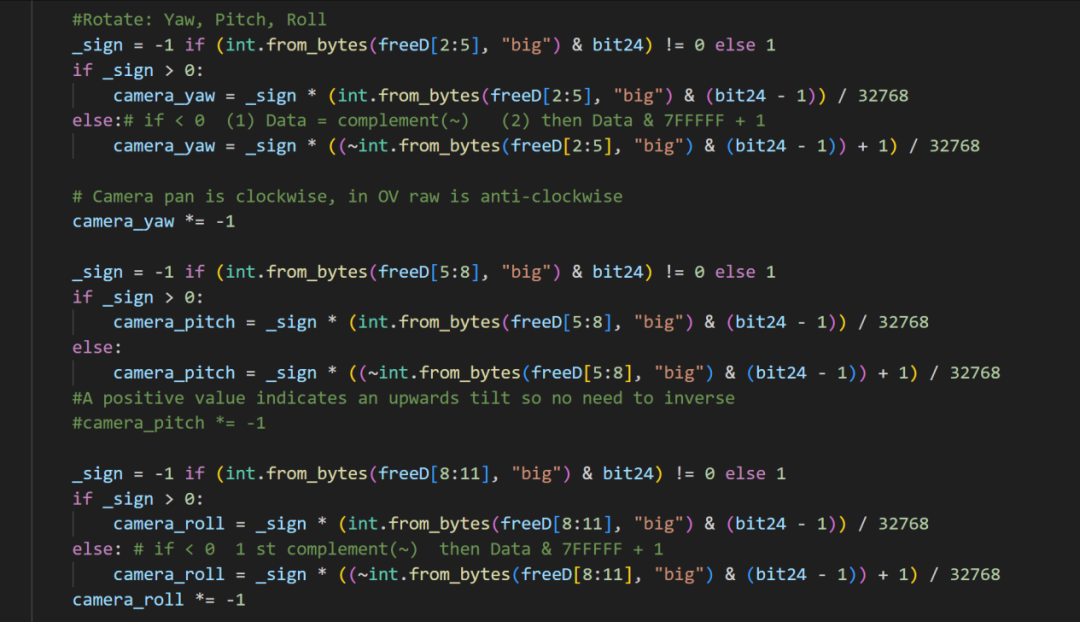
*注:從網絡端口傳來的數據是大端格式, 并且如果是負數的話則需按照負數補碼來解析。
2.2.3計算 Yaw Pitch Roll:
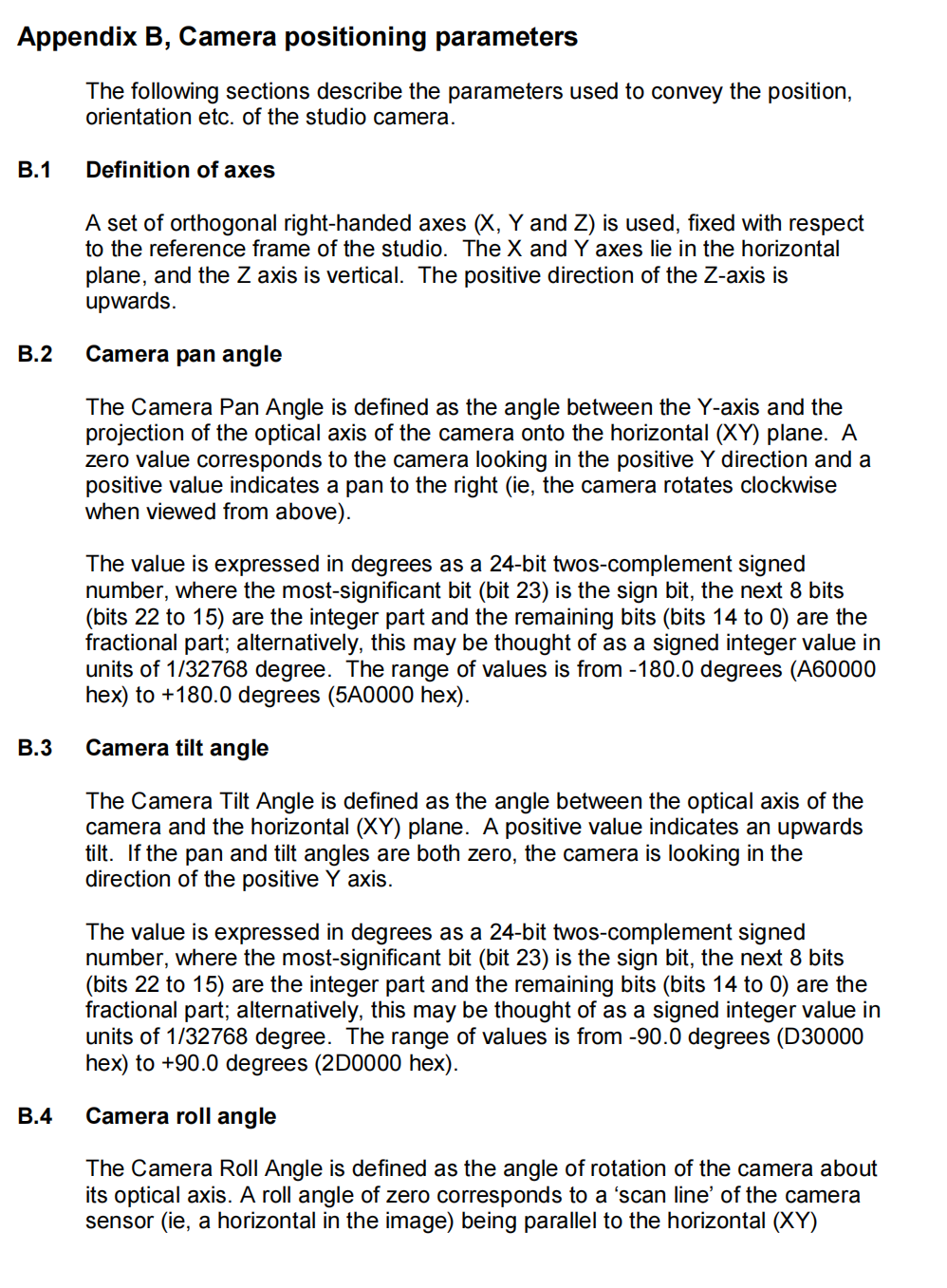
旋轉 Pan,Tilt,Roll(Yaw Pitch Roll)的角度定義
2.2.4計算位置 X, Y, Z:
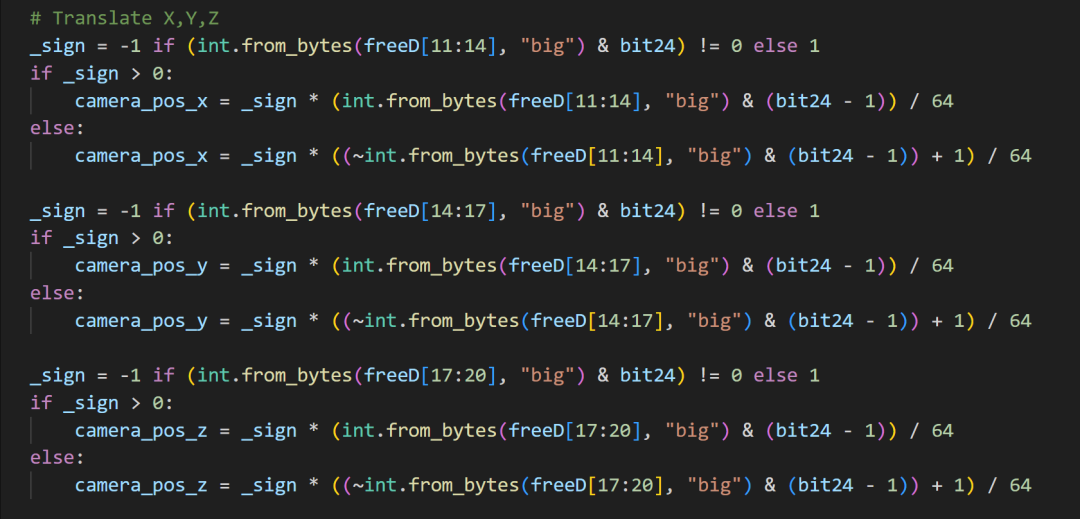
同理按照文檔計算 Translate 的 X Y Z 數據。
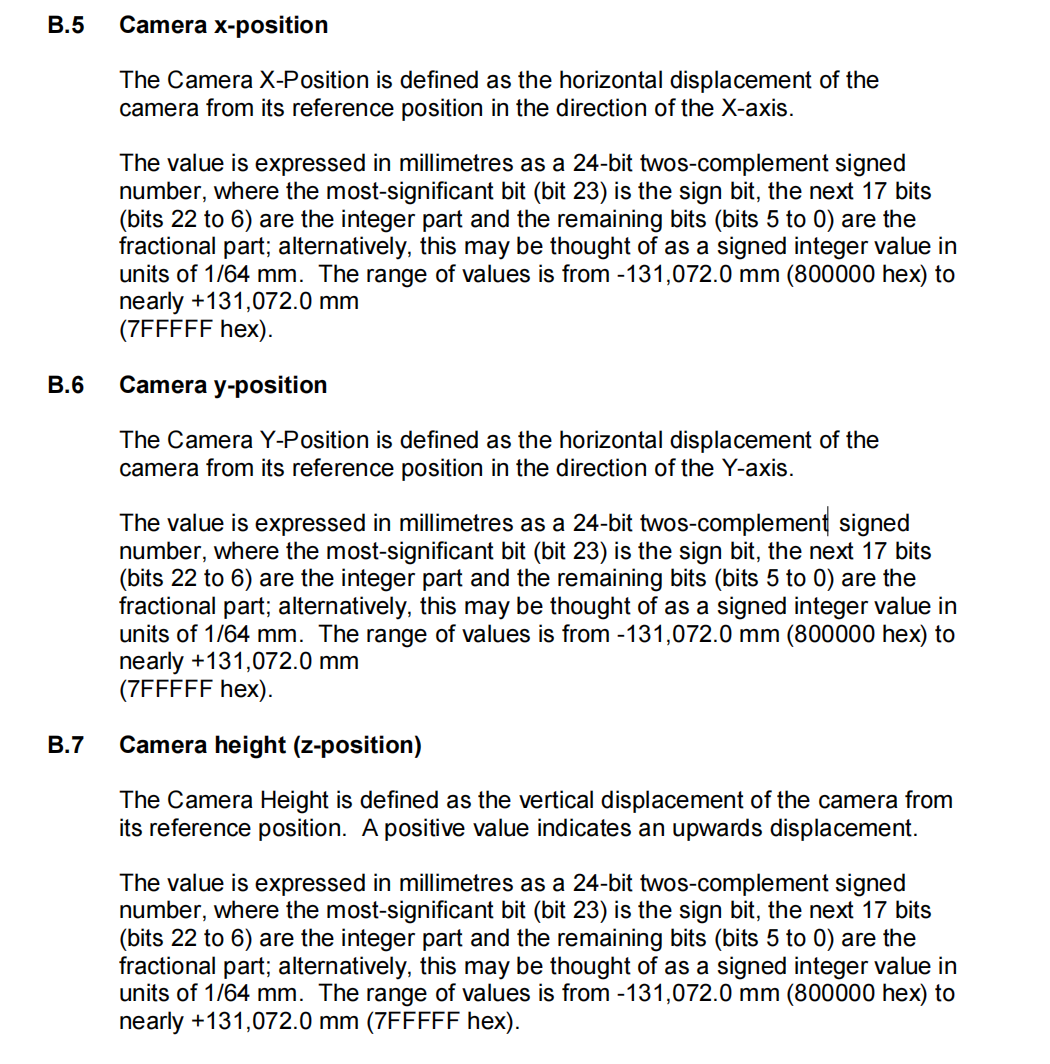
位置信息 X,Y,Z 的定義
按照定義給出代碼。
Zoom 和 Focus 和鏡頭文件相關,由于每一個鏡頭文件對應的解析都不太一樣,這里就不再詳細判斷。
最后把解析得到的 Yaw Pitch Roll 和 X,Y,Z 的數據更新到我們綁定的 Camera 上面實時更新。
3創建 Event 事件
3.1 發現問題
在子線程運行的時候發現無法對 USD Stage 場景的 Prim 操作,調試發現 USD Prim 都是 None。
這時候可以利用AI幫助,描述清楚問題的前因后果。
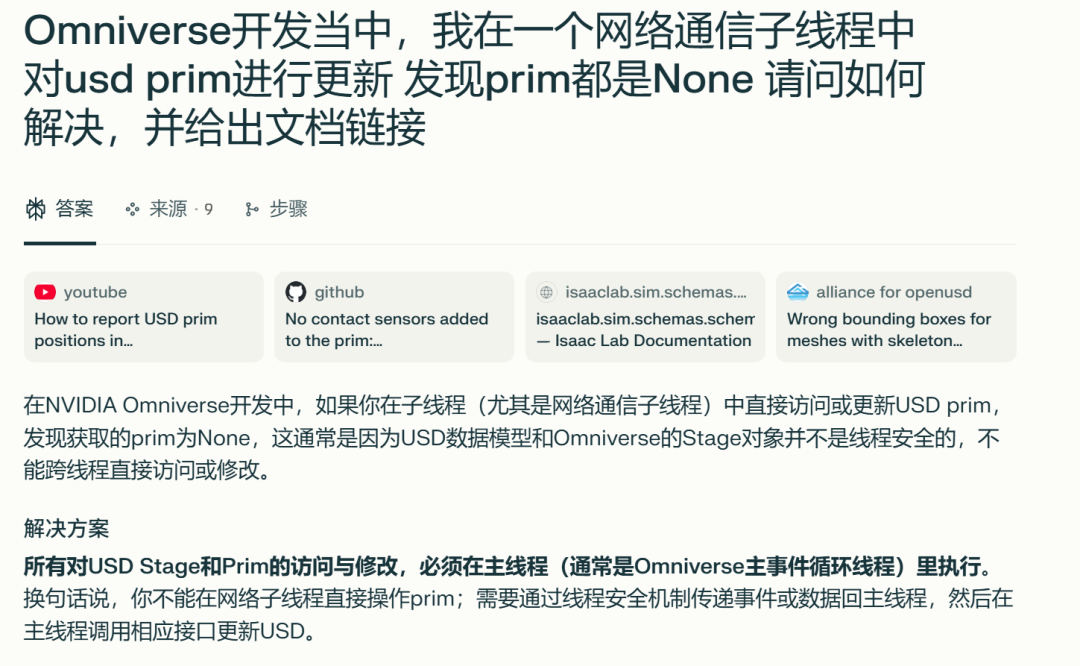
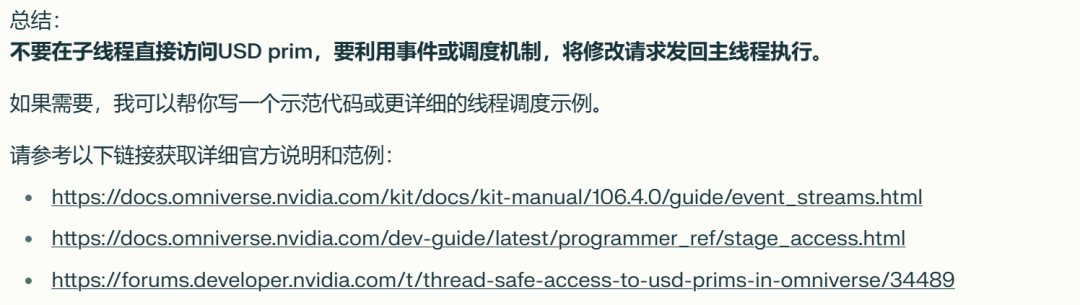
根據上面 AI 給出的提示,原因是 Omniverse 子線程中無法對 Stage 的 USD Prim 進行操作。 此時需要一個注冊主線程 Event 事件,在這個 Event 事件中去更新每一個 Prim 的操作。
此后還需考慮以下幾件事情:同步性(幀率統一)、設置延時、設置偏移、相機旋轉順序。
3.2 鎖定Omniverse渲染幀率
首先鎖定渲染的幀率。例如 FPS 鎖定在每秒 25 幀,FreeD 的發送幀率也鎖定到 25 幀。目的是保證良好的同步性,同時保證 Genlock 的傳輸接收效果良好。
關閉 Omniverse, 首先找到你對應的 Build 出來的 Composer 對應的.Kit文件,在“..kit107.3\_buildwindows-x86_64 eleaseapps” 里面包含所有配置的信息,用文本打開。
在[settings]下面添加以下字段, 注意是單獨的[settings]字段。
app.runLoops.main.rateLimitEnabled = true
app.runLoops.main.rateLimitFrequency = 25
app.runLoops.main.rateLimitUsePrecisionSleep = true
app.runLoops.main.syncToPresent = true
app.runLoops.present.rateLimitEnabled = true
app.runLoops.present.rateLimitFrequency = 25
app.runLoops.present.rateLimitUsePrecisionSleep = true
app.runLoops.rendering_0.rateLimitEnabled = true
app.runLoops.rendering_0.rateLimitFrequency = 25
app.runLoops.rendering_0.rateLimitUsePrecisionSleep = true
app.runLoops.rendering_0.syncToPresent = true
app.runLoops.rendering_1.rateLimitEnabled = true
app.runLoops.rendering_1.rateLimitFrequency = 25
app.runLoops.rendering_1.rateLimitUsePrecisionSleep = true
app.runLoops.rendering_1.syncToPresent = true
app.runLoopsGlobal.syncToPresent = true
app.vsync=true
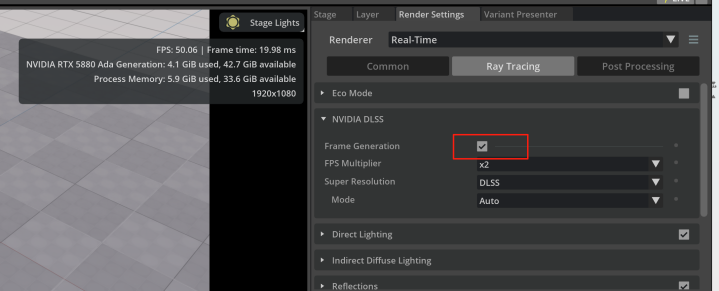
重新打開 Omniverse 的 Composer ,可以看到此時的幀率是 50。原因是我們開啟了 DLSS 的 Frame Generation功能。 如果去掉 Frame Generation ,則會顯示 25 幀率。
3.3 注冊渲染 on_update 事件
要得到渲染事件的事件,需要在每一次渲染 Render 開始的時候取出一幀進行合并。
https://docs.omniverse.nvidia.com/dev-guide/latest/programmer_ref/events.html
Event streams 是以線程安全的方式傳遞數據,是由 Omniverse 的核心組件 carb 來提供,下面就是每一幀渲染的時候都會調用的函數, 后還需要再on_update函數去處理。
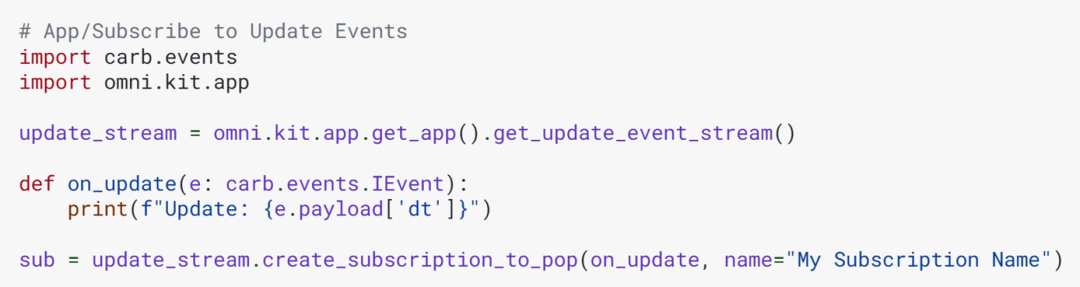
注冊 Event:
sub1= update_stream.create_subscription_to_pop(on_update, name="My Subscription Name")
解除注冊:需要把這個 sub1 設置為 None (并沒有 unsubscription 這個函數)
sub1= None
這里需要注意的是,在實際工程中要注意這個 sub1 的生命周期,不能用一個局部變量去存儲注冊的 event,否則在出了這個局部函數sub1以后會自動設置為 None,解決辦法是用一個成員變量去控制
self._sub= update_stream.create_subscription_to_pop,
然后在不需要的時候設置為 None:
self._sub= None
4相機延遲和定位偏移
4.1 相機延遲
相機延遲:在虛擬拍攝當中,除了相機定位,還有動捕數據,綠幕視頻流傳輸數據,這些數據需要處理的時間比 FreeD 要耗時,所有可能會造成不同步,這就需要給相機定位在本地緩沖增加一些延時,例如可以在程序中開一個 Buffer 來緩沖一下
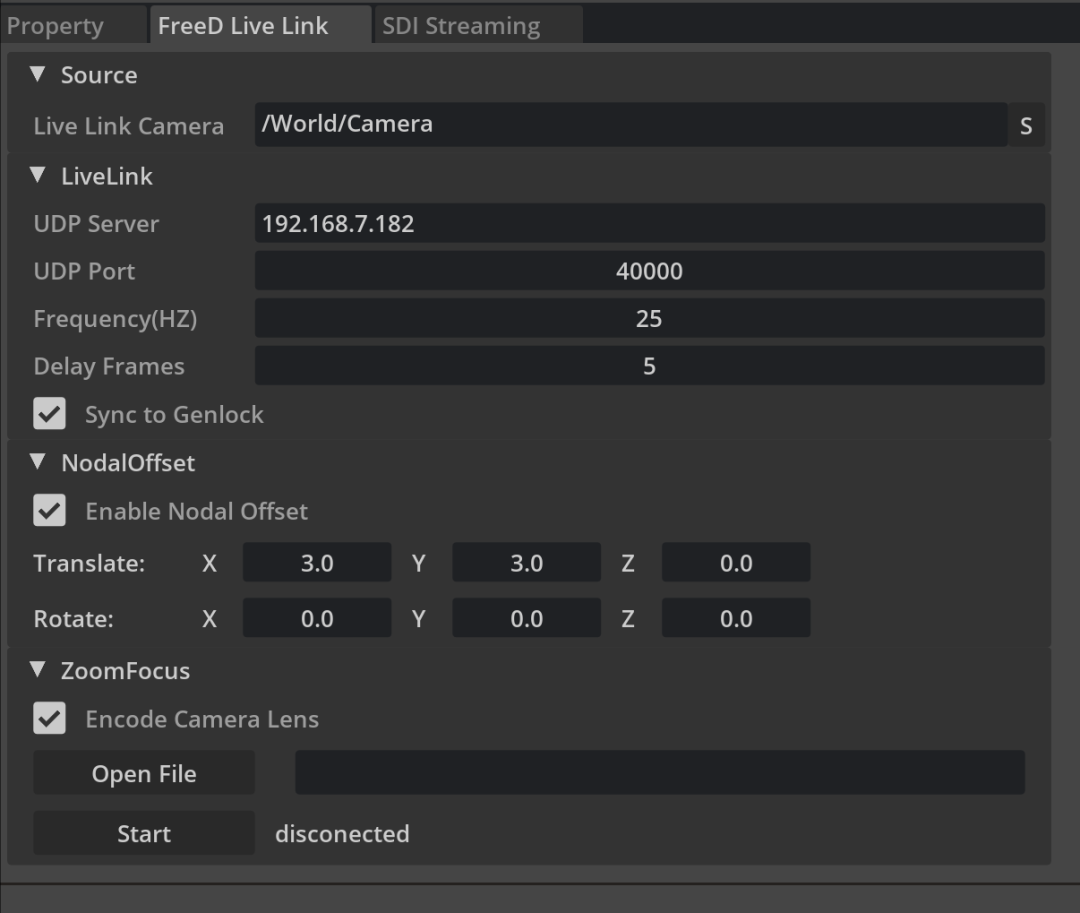
4.2 定位偏移
因為定位設備和實際有偏移,所以利用 Nodal offset 來手動添加偏移量。

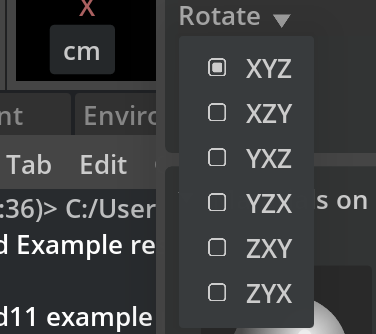
5設置 Camera 旋轉順序
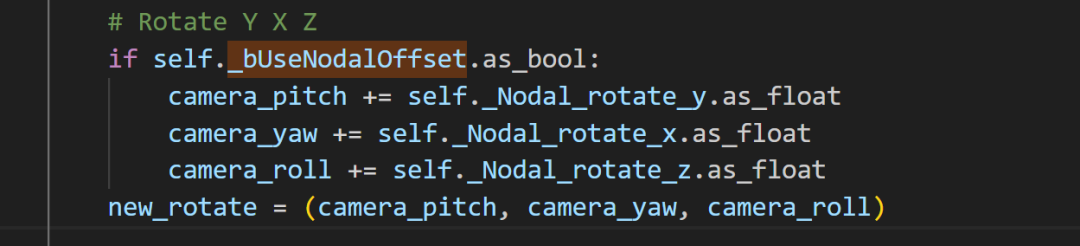
歐拉角的旋轉是有順序的,其本質是因為旋轉對應的矩陣乘法不具備交換律。在 Omniverse Rotate 有 6 種方式,我們應該以哪種旋轉指定呢?
在 Omniverse 當中,應 Y 軸向上,按照 FreeD 的解析,即 Y, X, Z 的順序。 我們在 Omniverse 里按照 ZXY 給出旋轉順序的具體原理可以查看知乎中的這篇帖子:https://zhuanlan.zhihu.com/p/85108850
6最終
結合所有的步驟,完成最終所有功能。
iPhone 上面的 JetSet 軟件可以發送 FreeD 定位協議,這樣我們即可通過上面的思路完整做出一個符合工業標準的插件。
文案&技術支持:
宋毅明 NVIDIA Omniverse & OpenUSD 開發者關系經理
-
通信協議
+關注
關注
28文章
1093瀏覽量
42285 -
定位系統
+關注
關注
10文章
659瀏覽量
37666 -
攝像機
+關注
關注
3文章
1774瀏覽量
63205
原文標題:實戰項目拆解!當 FreeD 定位系統遇上 Omniverse Extension
文章出處:【微信號:Leadtek,微信公眾號:麗臺科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
NVIDIA Omniverse Extension開發秘籍

NVIDIA將NVIDIA Omniverse帶給全球超過250萬的開發者
用NVIDIA Omniverse連接游戲開發工作流
NVIDIA Omniverse Create最新版功能介紹
NVIDIA Omniverse的特性及應用
利用NVIDIA RTX和Omniverse取得的工作成果
利用 NVIDIA Omniverse 和 Bentley LumenRT 創建實時模擬

奧比中光將接入 NVIDIA Omniverse開發平臺
探索NVIDIA AI和Omniverse加速設計創作
NVIDIA Omniverse中的物理模擬功能

Omniverse教程(12):NVIDIA Omniverse USD Presenter的基礎應用

使用OpenUSD和NVIDIA Omniverse開發虛擬工廠解決方案

借助OpenUSD和NVIDIA Omniverse開發數字孿生應用
Foxconn利用NVIDIA AI和Omniverse訓練機器人
使用USDRT優化NVIDIA Omniverse的動態數據更改功能




 工商網監
工商網監
評論