") 國產(chǎn)飛控開發(fā)平臺 | HPMicro PX4 FMU-V6XHPM v0.1.0 發(fā)布
國產(chǎn)飛控開發(fā)平臺 | HPMicro PX4 FMU-V6XHPM v0.1.0 發(fā)布

各位關(guān)注先楫的小伙伴們,基于PX4 v1.16.0版本的FMU-V6XHPM v0.1.0(基于HPM_SDK v1.10.0)正式發(fā)布了!為想使用先楫芯片開發(fā)PX4飛控的朋友們提供了基礎(chǔ)平臺,用戶可在此基礎(chǔ)上進行快速開發(fā)。
Repo鏈接為:https://github.com/hpmicro/PX4-Autopilot
板級文件路徑為:boards/px4/fmu-v6xhpm
基于的開發(fā)板
- HPM6750EVKMINI
提供的主要功能
對如下drivers進行了適配
對如下模塊或軟件進行了對接
- 陀螺儀ICM20602
- 磁力計BMM350
- 氣壓計BMP390
- GPSIST8310
- FRAMFM25V02A
- EEPROM24LC64T
- ESC電調(diào)OneShot125, PWM400, PWM200, PWM100, PWM50
- SBUS接口遙控器
- QGC地面站
信號接線表
| 模塊 | 外設(shè) | 引腳 |
|---|---|---|
| FM25V02A | SPI2 | PB21, PB22, PB24, PB25 |
| ICM20602 | SPI3 | PB29, PB30, PC02, PC03, PD19 |
| BMM350 | I2C3 | PB13, PB14 |
| BMP390 | I2C3 | PB13, PB14 |
| 24LC64 | I2C3 | PB13, PB14 |
| 24LC64 | I2C0 | PB10, PB11 |
| IST8310 | I2C0, UART13 | PB10, PB11, PZ08, PZ09 |
| ESC電調(diào) | PWM0, PWM1 | PB18, PB19, PB26, PB27 |
| SBUS接口遙控器 | UART6 | PD24(信號輸入) -> PD25(取反輸出) -> PE27 |
| Console | UART0 | PY06, PY07 |
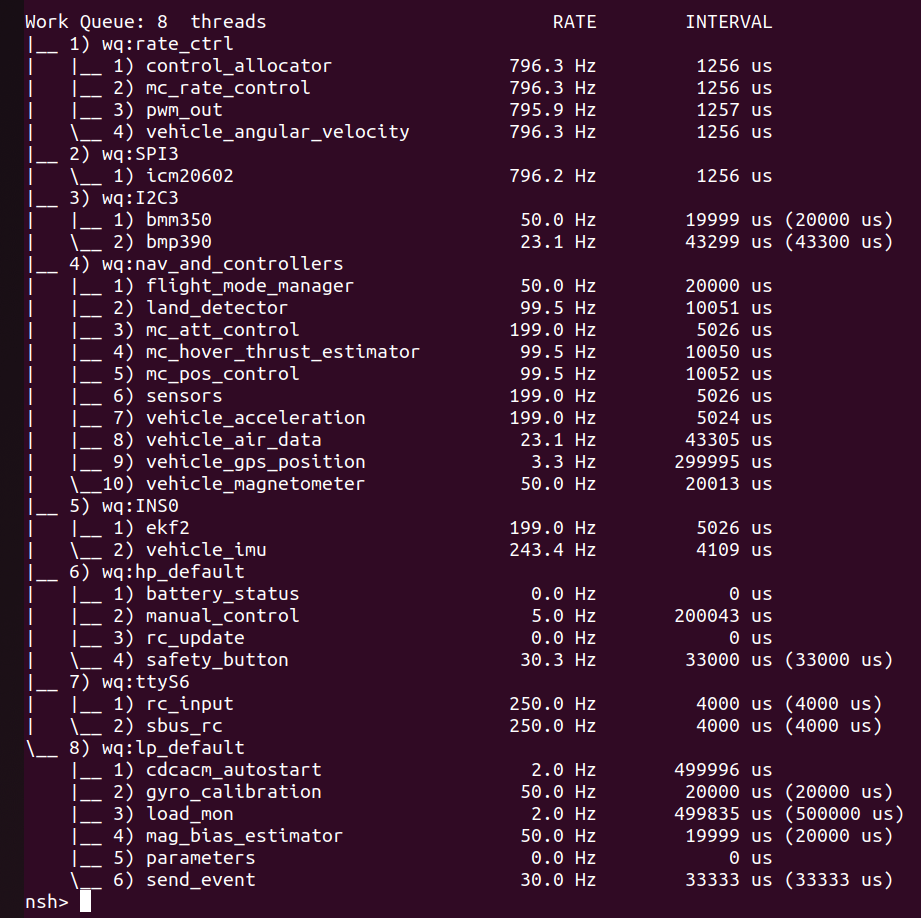
性能指標(biāo)
執(zhí)行work_queue status指令,顯示的threads信息如下:
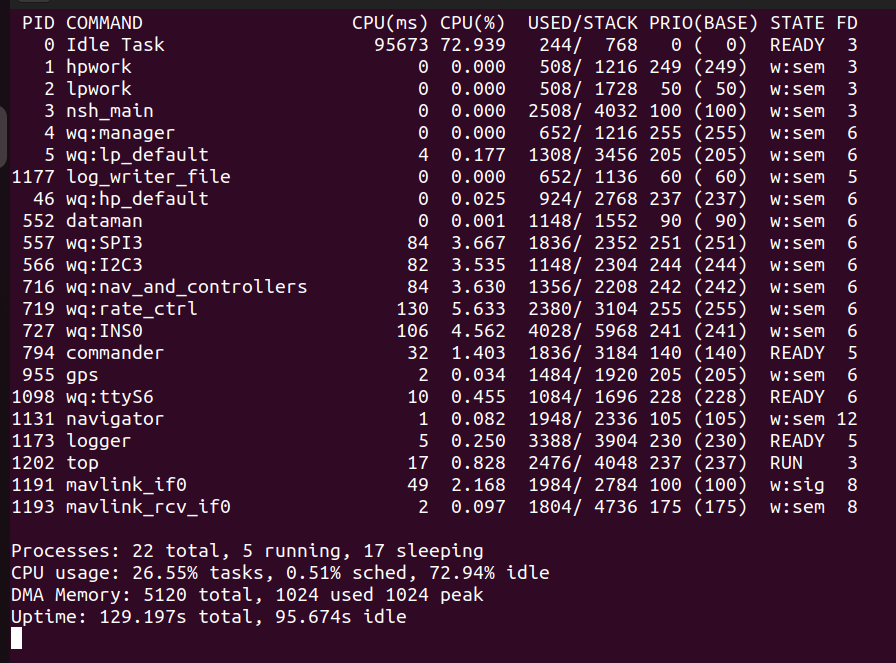
執(zhí)行top指令,顯示的CPU使用率信息如下,CPU使用率為26.55%。
開發(fā)環(huán)境
- Ubuntu 22.04 LTS
編譯器
- 編譯器為GCC
- 下載鏈接為:https://github.com/hpmicro/riscv-gnu-toolchain/releases/tag/2023.10.18
- 在Home路徑中新建ToolChain文件夾,路徑為~/Toolchain,并將工具鏈解壓至該文件夾中
- 在~/.bashrc文件中的最后一行新增如下語句,將工具鏈加入到環(huán)境變量$PATH中。
export PATH=$PATH:~/Toolchain/rv32imac_zicsr_zifencei_multilib_b_ext-linux/bin
OpenOCD
- 下載鏈接為:https://github.com/hpmicro/riscv-openocd/releases/tag/hpm_xpi_v0.3.0
- 將其解壓至~/Toolchain文件夾中
- 在~/.bashrc文件中的最后一行新增如下語句,將工具加入到環(huán)境變量$PATH中。
export PATH=$PATH:~/Toolchain/openocd-linux/bin
編譯代碼
從GitHub下載代碼
git clone --recurse-submodules git@github.com:hpmicro/PX4-Autopilot.git
在PX4-Autopilot根目錄下,執(zhí)行如下指令:
cd PX4-Autopilot
make px4_fmu-v6xhpm_default
下載并運行
使用板載FT2232 + OpenOCD的方式進行下載調(diào)試
到px4-autopilot/platforms/nuttx/NuttX/nuttx/arch/risc-v/src/hpmicro/hpm_sdk/boards/openocd目錄下啟動OpenOCD,指令如下:
openocd -f probes/ft2232.cfg -f soc/hpm6750-single-core.cfg -f boards/hpm6750evkmini.cfg
到px4-autopilot/build/px4_fmu-v6xhpm_default目錄下,使用GDB下載并運行程序,指令如下:
riscv32-unknown-elf-gdb ./px4_fmu-v6xhpm_default.elf
(gdb) target remote localhost:3333
(gdb) mon reset halt
(gdb) load
(gdb) c
Console 串口調(diào)試終端
- 可使用picocom作為串口調(diào)試終端Console,指令如下:
sudo picocom -b 115200 /dev/ttyUSB1
-
開發(fā)板
+關(guān)注
關(guān)注
26文章
6345瀏覽量
119450 -
飛控
+關(guān)注
關(guān)注
4文章
32瀏覽量
21786 -
先楫半導(dǎo)體
+關(guān)注
關(guān)注
12文章
286瀏覽量
3353
發(fā)布評論請先 登錄
DeepSeek V3.1發(fā)布!擁抱國產(chǎn)算力芯片
HPM知識庫 | HPMicro Ardupilot支持包v0.1.0發(fā)布!

飛控開發(fā)者必看 | HPMicro Betaflight v0.1.0發(fā)布

科大訊飛發(fā)布訊飛星火X1.5及系列AI產(chǎn)品
安世PESD3V3X4UHM國產(chǎn)化替代

全球首款RiSC-V企業(yè)級模擬平臺,躍昉科技LeapEMU正式亮相

賽昉科技入駐RuyiSDK開發(fā)者社區(qū),雙平臺協(xié)同推進RISC-V生態(tài)

IAR發(fā)布RISC-V開發(fā)工具鏈v3.40.1版本
IAR開發(fā)平臺升級Arm和RISC-V開發(fā)工具鏈,加速現(xiàn)代嵌入式系統(tǒng)開發(fā)
納雷科技成為PX4開源飛控平臺官方合作伙伴
國產(chǎn)升壓芯片如何單節(jié)鋰電3.7V升壓24V或4.2V升壓24V
軟件平臺的使用(SC171開發(fā)套件V3)
科大訊飛深度解析DeepSeek-V3/R1推理系統(tǒng)成本

在MR-VMU-RT1176上運行的PX4飛行控制軟件的負載(大約)是多少?
原來,它們用的都是國產(chǎn)RISC-V芯片




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論