 機器人也要上大模型?英飛凌、ADI宣布跟進
機器人也要上大模型?英飛凌、ADI宣布跟進

近日,NVIDIA(英偉達)在官方博客公布了新一代邊緣計算平臺 Jetson Thor,專門面向通用機器人應用。
英偉達Jetson Thor采用NVIDIA Blackwell GPU提供高達2,070 FP4 TFLOPS的AI計算能力;運算中心功耗也躍升至40–130W區間,其中開發者套件運行在130W功耗范圍內。

圖/英偉達官網
伴隨128 GB LPDDR5X內存的升級,這使英偉達Thor更適合在設備端并行處理多路高速傳感數據,并支持生成式/基礎模型推理,滿足更苛刻的實時機器人應用需求。
值得注意的是,多家合作廠商出現在英偉達的生態名單中。其中,ADI(亞德諾半導體)、Infineon(英飛凌)兩家元器件合作商相繼發布合作公告,明確將與英偉達共同開發基于Jetson Thor的機器人感知、控制與電源架構。
01 動態場景下的實時性瓶頸
從人形機器人的行走與姿態保持,到手術輔助機器人、配送與工業機器人,再延伸至農業、物流機器人和自主系統機器人,這些機器人應用場景的共同特點是:機器人必須在動態環境中同時處理多路感知輸入,并在極短時間內完成決策與執行。對機器人感知—規劃—控制鏈路的時延、抖動和并發穩定性提出了遠高于傳統工業控制機器人的要求。
圖/英偉達官網
然而,現有機器人架構難以支撐這種復雜度。傳統機器人模式通常依賴“云端推理 + 設備端輕載”:各類傳感器數據經過局部控制器或多級MCU預處理,再上傳至中央單元甚至回傳云端,最后再下發執行指令。這種層級化架構帶來三個突出問題:
閉環時延:多級鏈路和跨模塊傳輸不可避免地產生延遲和抖動,機器人執行端動作被放大,尤其在步態控制、力控或視覺伺服等任務中,極易造成動作不穩。
并發與隔離不足:多路傳感器數據和代理式任務需要并行運行,但分散式算力無法保障資源隔離,容易出現爭搶和掉幀,直接影響機器人軌跡精度與抓取質量。
帶寬與容量瓶頸:多模態輸入不斷推高I/O與內存需求,若硬件承載力不足,只能削弱或降級模型,導致策略與動作質量下降,無法支撐復雜機器人人機協作。
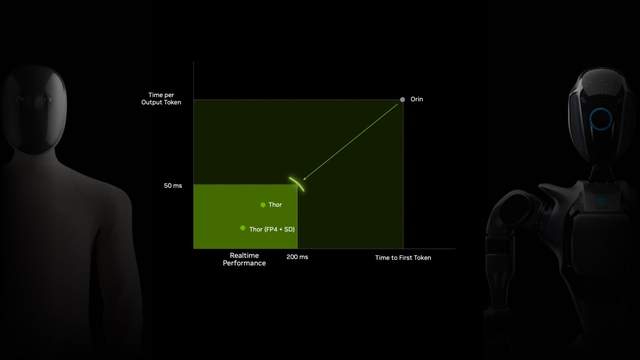
英偉達指出過往工作流“因速度過慢,無法在動態真實環境中運行”,因此新平臺定位為在設備端運行更大模型、支持多任務并發的實時推理,并展示了人形機器人與移動平臺在多傳感并發與本地高吞吐處理下的應用場景。
02 集中化架構重構,“感知—推理—輸出”鏈路
為了解決機器人實時性和并發性的矛盾,英偉達在官方博客和發布視頻中給出了Jetson Thor的的架構要點。新架構的變化不僅體現在算力提升,而是對機器人“傳感—推理—輸出”整條鏈路的集中化與重構。
在機器人傳統方案中,攝像頭、雷達、IMU 等多源傳感器數據通常由各自的低功耗MCU進行預處理,再經由總線傳輸至中央模組,由GPU或CPU進行融合與推理。多層路徑和跨模塊通信不可避免地引入延遲和抖動。
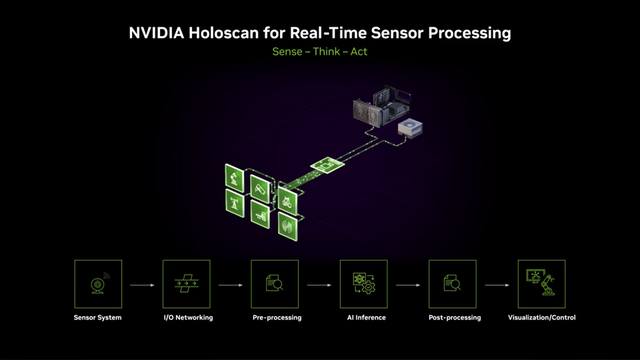
圖/英偉達官網
而在英偉達Jetson Thor架構中,路徑被重新整合為三段:
輸入端:通過Holoscan Sensor Bridge,多模態傳感數據可直接進入GPU/CPU內存,以低延遲完成時間同步。這使Thor能夠承載更復雜的多傳感并發任務。
計算端:集中推理與多任務隔離。中央SoC基于Blackwell GPU和14核Arm CPU,最高支持128GB內存,并具備MIG(多實例 GPU)功能,可在同一平臺上隔離并行運行機器人視覺、語言、規劃等任務。
輸出端:提供了豐富硬件接口,包括高速以太網(4×25 GbE等)與其他I/O選項。這使得執行層的控制單元、傳感器與Thor算力中心間能夠保持高速、低延遲的數據交換。
英偉達表示除人形機器人外,Jetson Thor還將為各類機器人應用提速,包括手術輔助機器人、智能牽引車、配送機器人、工業機械臂及視覺AI智能體等,能在邊緣端為規模更大、復雜度更高的AI模型提供實時推理能力。
03 生態協同,ADI 與英飛凌的適配切入
英偉達發布Jetson Thor平臺后,ADI和英飛凌相繼官宣合作,前者把邊緣感知、精密運動控制、電源完整性與確定性連接對接至英偉達Jetson Thor及其工具鏈,后者從人形機器人中的運動與效率場景切入,加入該生態。
亞德諾(ADI):從傳感到仿真的閉環適配
ADI表示,將把完整的機器人技術棧與英偉達Jetson Thor平臺深度集成,覆蓋 邊緣感知、精密運動控制、電源完整性和確定性連接 等關鍵環節。
多模態傳感:提供ToF深度攝像頭、高精度IMU、關節編碼器和多軸力/扭矩傳感器,為Thor的感知層輸入高保真數據,增強模型訓練與實時推理的物理準確性。
精密運動與電源:通過多圈磁編碼器與電流/扭矩閉環控制,實現高精度驅動,并以電源完整性為核心保障,使機器人在高功率條件下仍能穩定運行。
確定性連接:借助Holoscan Sensor Bridge與JetPack 7,將傳感器和執行器數據以可控延遲直通Thor的GPU/CPU;結合高速互聯技術,在機器人手部、手臂、軀干和感知節點間實現時間對齊的數據融合,確保“感知—推理—動作”閉環的同步性與低延遲。
仿真建模:將傳感器與執行器建模到Isaac Sim數字孿生環境中,使算法先在虛擬環境中完成訓練,再無縫遷移到實機運行,從而顯著縮短機器人開發迭代周期。
通過這一整套方案,ADI不僅在硬件傳感和電源鏈路上與英偉達Thor平臺對接,還在工具鏈、連接與仿真閉環上完成了適配,為機器人廠商提供了更快、更確定的開發路徑。
英飛凌:安全高效的運動控制賦能機器人
另一邊,英飛凌也瞄準了英偉達Jetson Thor在人形機器人上的巨大潛力,宣布攜手英偉達提供精準運動與高效電機控制解決方案。
英飛凌在新聞稿中表示,將把其在機器人功率、微控制器、傳感與連接領域的完整產品組合,與Jetson Thor平臺深度集成,重點面向人形機器人等復雜運動系統的需求。
在機器人控制單元層面,AURIX?與PSOC?系列MCU具備多核實時處理和功能安全特性,廣泛應用于汽車安全系統,如今被用于機器人關節和傳感器節點的確定性控制。這一經驗遷移,使機器人能夠在高實時和高可靠條件下保持穩定動作。
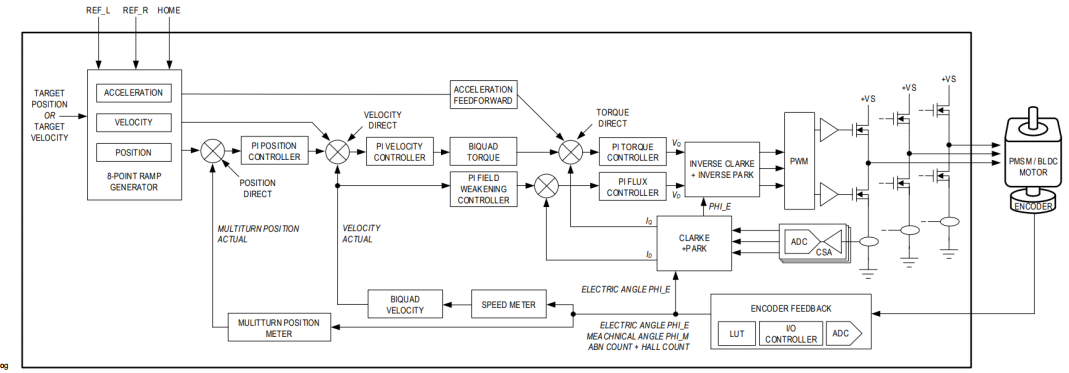
在機器人電機控制方面,英飛凌推出的PSOC? Control C3系列MCU已與NVIDIA Holoscan平臺實現對接,可直接連接Jetson Thor模塊,完成機器人從傳感到執行的實時閉環控制。其內置的FOC(磁場定向控制)算法,能夠顯著降低電機驅動噪聲,提升扭矩輸出穩定性和運動精度。
在機器人功率與通信層面,英飛凌提供基于GaN的電機驅動開關、高性能柵極驅動器與電流傳感器,兼顧高功率密度與高效率。同時,憑借收購Marvell汽車以太網業務而推出的Brightlane?千兆以太網系列,為機器人內部構建高速、低延遲的通信骨干,使Jetson Thor與各節點間保持時間對齊與高帶寬的數據交互。
英飛凌CEO Jochen Hanebeck表示:“憑借我們在功率開關、微控制器、傳感與連接方面的技術積累,我們能夠幫助機器人實現感知、移動、執行與連接,并確保其安全可靠運行。”
通過這一方案,英飛凌將運動控制的安全性與能效引入Jetson Thor架構,為人形機器人和復雜自主系統的落地提供了完整的支撐路徑。
04 機器人架構演進對元器件的新要求
隨著應用場景復雜度提高,可以看到機器人必須在設備端完成高吞吐、多模態、低時延的實時推理已經成為未來趨勢。這一變化,對上游元器件廠商提出了新的適配要求。
首先,傳感與接口必須滿足高帶寬與嚴格的時間同步。多路傳感數據直通GPU/CPU,要求機器人傳感器和接口器件在硬件層面具備精準時間戳和低延遲傳輸能力,否則將成為閉環瓶頸。
其次,控制與執行需要在集中算力架構下實現更快的響應。Jetson Thor通過MIG提供多任務隔離,并配合高速互聯接口,使感知、推理結果能夠低延遲傳遞至機器人控制和執行環節。這要求相關元器件在響應速度與安全性上滿足更高標準。
第三,電源與能效管理的重要性顯著提升。隨著大模型和多任務在設備端成為常態,運算中心正從幾十瓦級邁向百瓦級,對機器人電源鏈路的功率密度、效率與完整性提出了更高要求。元器件廠商必須確保在高功率波動下仍能穩定供電,避免局部不穩拖垮整體推理。
以英偉達Jetson Thor為例,機器人“上大模型”是一場跨越算力、傳感、驅動與電源的系統協同。這些變化正在重塑對元器件的適配邏輯,也為上游廠商提供了新的觀察坐標。
本文為嗶哥嗶特資訊原創文章,未經允許和授權,不得轉載
審核編輯 黃宇
-
英飛凌
+關注
關注
68文章
2518瀏覽量
142873 -
電源
+關注
關注
185文章
18841瀏覽量
263503 -
機器人
+關注
關注
213文章
31076瀏覽量
222201 -
大模型
+關注
關注
2文章
3650瀏覽量
5179
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
小蘿卜機器人的故事
自制巡線解迷宮機器人(上)
共繪具身智能未來,ADI攜手產業伙伴舉行人形機器人媒體分享會

ADI借助NVIDIA Jetson Thor平臺加速人形機器人研發進程
ADI安全產品如何簡化不同機器人控制系統中安全機制的實現

工業機器人的特點
ADI人形機器人的“感覺神經 + 電力神經元”核心芯片方案盤點
ADI如何重塑人形機器人運動核心



 工商網監
工商網監
評論