") 【機(jī)器視覺(jué)】睿擎平臺(tái)支持NCNN AI 推理框架,輕松實(shí)現(xiàn)實(shí)時(shí)目標(biāo)檢測(cè)( 睿擎線下 Workshop 報(bào)名已開(kāi)啟)|產(chǎn)品動(dòng)
【機(jī)器視覺(jué)】睿擎平臺(tái)支持NCNN AI 推理框架,輕松實(shí)現(xiàn)實(shí)時(shí)目標(biāo)檢測(cè)( 睿擎線下 Workshop 報(bào)名已開(kāi)啟)|產(chǎn)品動(dòng)

在工業(yè)4.0與邊緣計(jì)算加速發(fā)展的背景下,嵌入式設(shè)備的實(shí)時(shí)目標(biāo)檢測(cè)能力已成為智能制造等領(lǐng)域的核心技術(shù)需求。然而,移動(dòng)端設(shè)備受限于算力與能耗,傳統(tǒng)深度學(xué)習(xí)框架難以兼顧效率與精度。為此,睿擎平臺(tái)在RT-Thread 系統(tǒng)上深度集成NCNN推理框架,通過(guò)其輕量化架構(gòu)與硬件級(jí)優(yōu)化能力,結(jié)合YOLO系列算法的高效單階段檢測(cè)特性,實(shí)現(xiàn)了工業(yè)場(chǎng)景下的目標(biāo)檢測(cè)系統(tǒng)。
一. NCNN 簡(jiǎn)介
NCNN是由騰訊公司開(kāi)源的一個(gè)專為移動(dòng)端平臺(tái)設(shè)計(jì)的高性能神經(jīng)網(wǎng)絡(luò)前向計(jì)算框架。該框架以其輕量級(jí)、高效率以及強(qiáng)大的跨平臺(tái)兼容性而著稱,能夠在資源受限的移動(dòng)設(shè)備上實(shí)現(xiàn)深度學(xué)習(xí)模型的快速部署與高效推理。NCNN的核心優(yōu)勢(shì)在于其精簡(jiǎn)的庫(kù)體積、優(yōu)化的計(jì)算性能,特別適用于嵌入式設(shè)備等邊緣計(jì)算場(chǎng)景中的AI應(yīng)用開(kāi)發(fā)。
二. YOLO 模型簡(jiǎn)介
YOLO(You Only Look Once)是一種革命性的實(shí)時(shí)目標(biāo)檢測(cè)架構(gòu),其核心思想是將目標(biāo)檢測(cè)任務(wù)重構(gòu)為單階段回歸問(wèn)題。與傳統(tǒng)的兩階段檢測(cè)器(如Faster R-CNN)相比,YOLO通過(guò)單次前向傳播即可同時(shí)預(yù)測(cè)圖像中所有目標(biāo)的邊界框坐標(biāo)、類別概率和置信度。當(dāng)前YOLO系列(v5/v7/v8/v10)持續(xù)優(yōu)化精度-速度平衡,結(jié)合NCNN等輕量級(jí)推理框架,已成為工業(yè)機(jī)器視覺(jué)領(lǐng)域?qū)崟r(shí)目標(biāo)檢測(cè)的部署標(biāo)準(zhǔn)。其單階段處理架構(gòu)從根本上解決了傳統(tǒng)方法在實(shí)時(shí)性上的瓶頸,為嵌入式設(shè)備賦予高響應(yīng)能力。
三. 睿擎派實(shí)戰(zhàn)部署
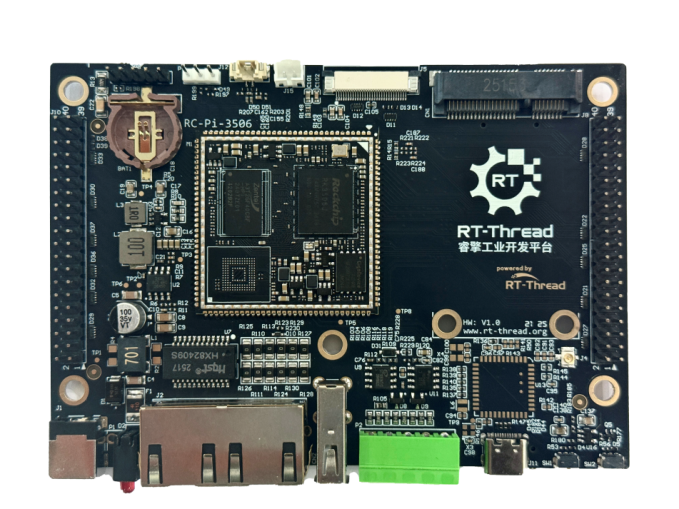
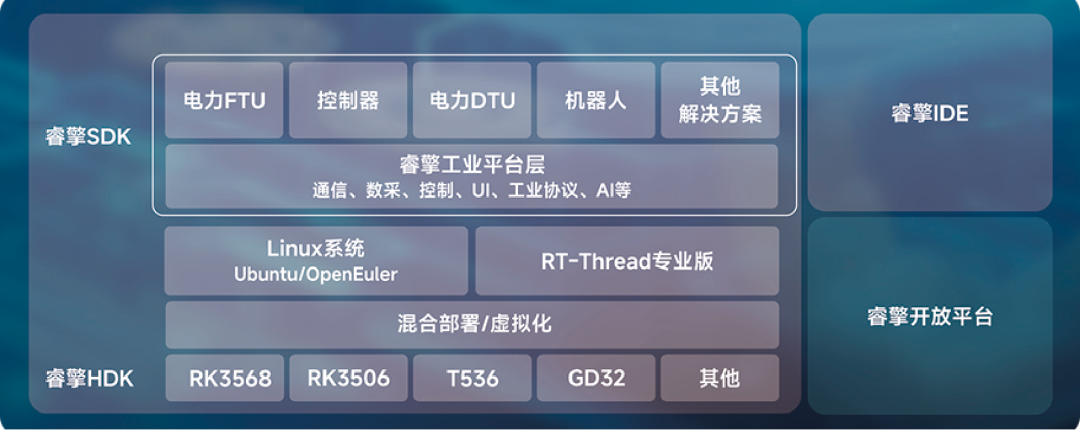
以下步驟完整展示了在睿擎派(基于瑞芯微 RK3506J 三核 Cortex A7 1.5G 主頻,256M Bytes DDR,256M Bytes Nandflsh)硬件平臺(tái)上部署和運(yùn)行 YOLOV3 模型的過(guò)程。
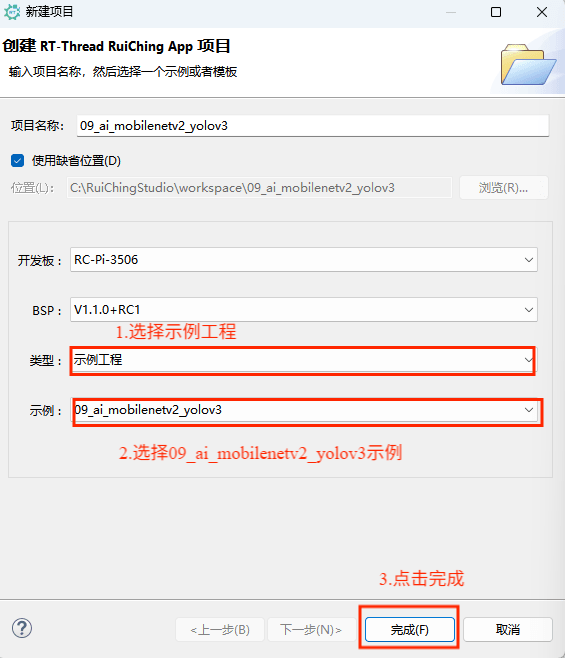
1. 創(chuàng)建示例工程
a.示例工程
在RuiChing Studio 中,按以下步驟創(chuàng)建 09_ai_mobilenetv2_yolov3
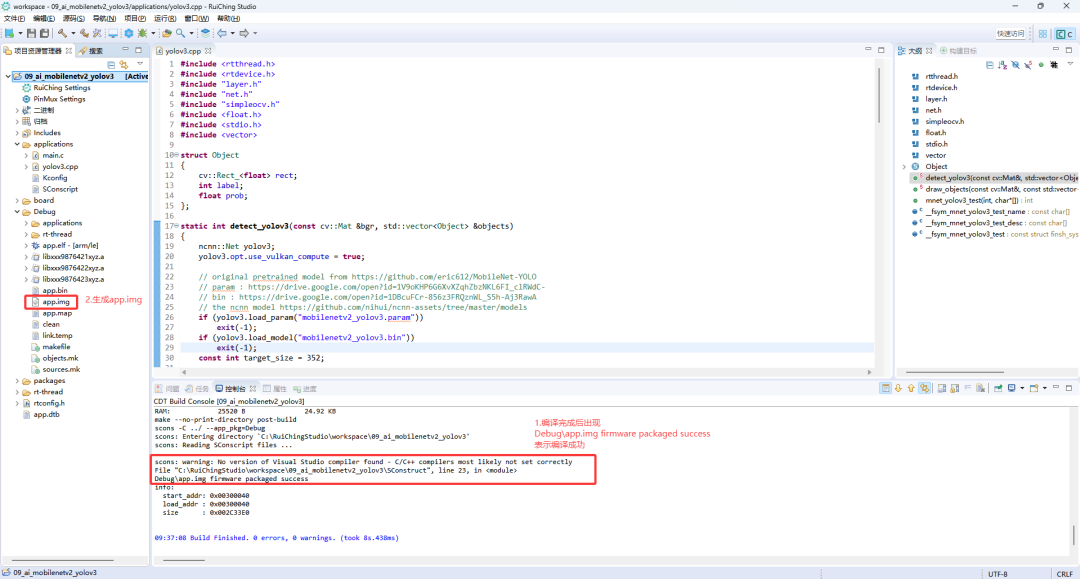
b. 核心示例代碼
工程生成的 yolov3.cpp 文件中,核心代碼部分如下:

c. 對(duì)核心代碼解析如下:
l cv::imread:加載需要檢測(cè)的圖像;
l detect_yolov3:運(yùn)用 YOLOv3 模型對(duì)輸入的圖像進(jìn)行目標(biāo)檢測(cè),把檢測(cè)到的目標(biāo)信息存于 objects 向量中;
l draw_objects :在輸入圖像上繪制檢測(cè)到的目標(biāo)框和標(biāo)簽,然后把繪制后的圖像保存到指定路徑源。
2. 編譯示例工程
對(duì) 09_ai_yolo_detection 示例工程進(jìn)行編譯:
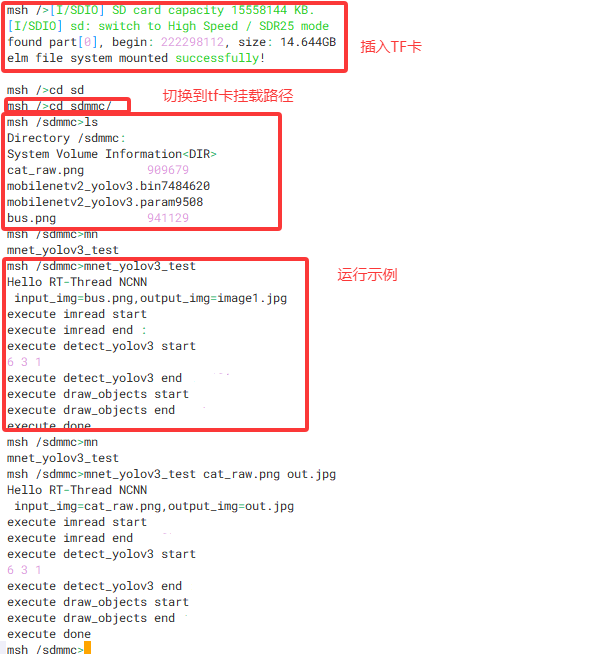
3. 運(yùn)行程序
a. 準(zhǔn)備模型和資源
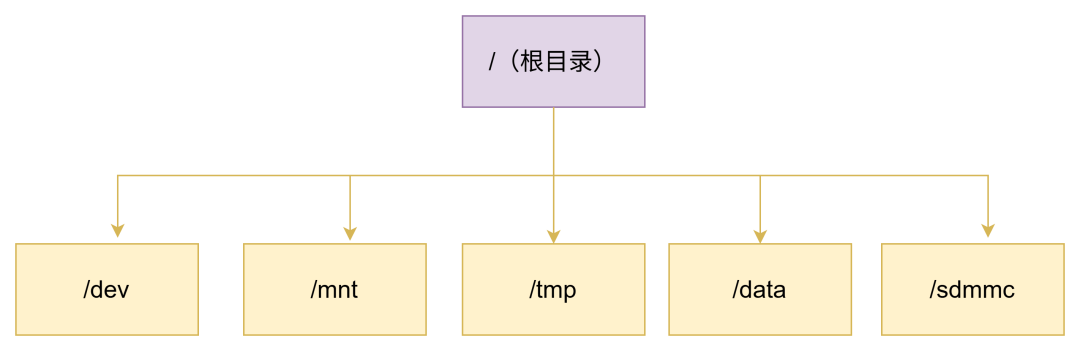
在SD卡中存放mobilenetv2_yolov3.param和mobilenetv2_yolov3.bin,以及待檢測(cè)的圖片。
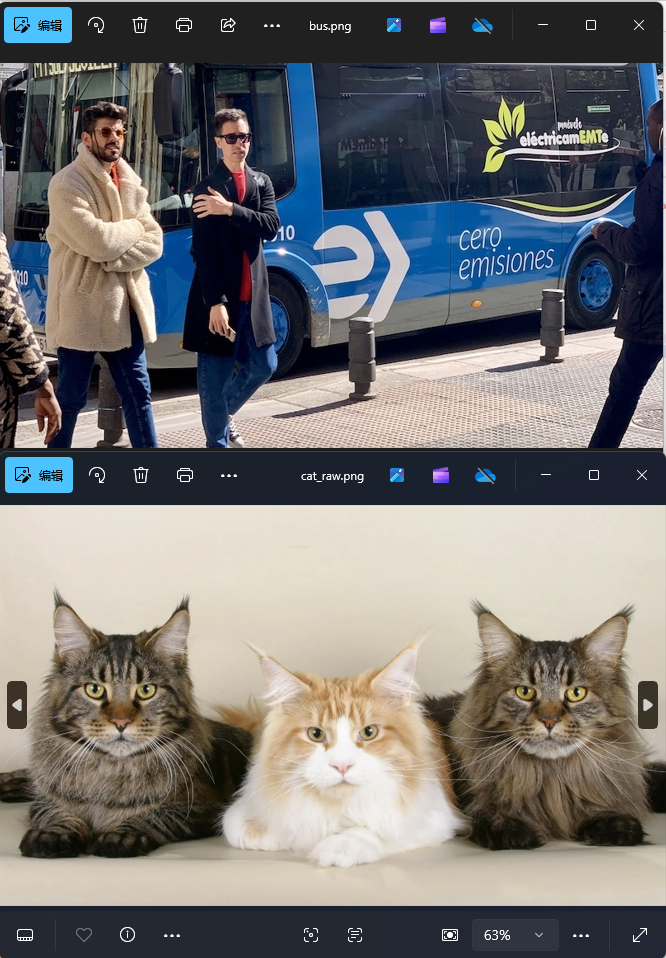
b. 運(yùn)行程序
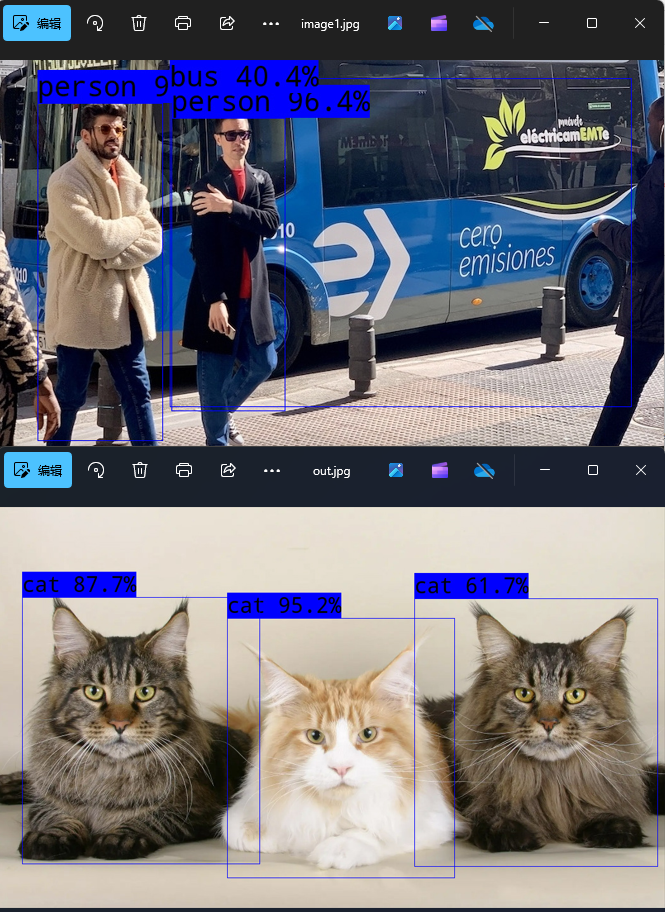
運(yùn)行程序后,將測(cè)試圖像傳入系統(tǒng),程序會(huì)調(diào)用 YOLO 模型進(jìn)行目標(biāo)檢測(cè),在輸出圖像上繪制檢測(cè)到目標(biāo)的邊界框和類別標(biāo)簽。
查看檢測(cè)結(jié)果
小結(jié)
睿擎工業(yè)開(kāi)發(fā)平臺(tái)憑借其全棧自主可控的軟硬件協(xié)同架構(gòu),在成功部署YOLO等視覺(jué)檢測(cè)模型的基礎(chǔ)上,進(jìn)一步支持多類型AI框架與模型的靈活接入,為工業(yè)場(chǎng)景提供了開(kāi)放、高效的AI賦能平臺(tái)。
想親手在睿擎派上復(fù)現(xiàn) NCNN+YOLO 的實(shí)時(shí)目標(biāo)檢測(cè)?想體驗(yàn)從模型部署到工業(yè)場(chǎng)景落地的全流程實(shí)操?
9 月 4 日,睿擎工業(yè)開(kāi)發(fā)平臺(tái)上海站 Workshop 為你開(kāi)放專屬實(shí)戰(zhàn)機(jī)會(huì) —— 現(xiàn)場(chǎng)不僅能近距離觀摩機(jī)器視覺(jué) DEMO(基于 NCNN 框架的實(shí)時(shí)目標(biāo)檢測(cè),搭配 4.3 寸 MIPI 屏直觀展示檢測(cè)結(jié)果)
參會(huì)即得 “睿擎派” 50 元優(yōu)惠券,更有機(jī)會(huì)抽中睿擎派開(kāi)發(fā)板或《RT-Thread 設(shè)計(jì)與實(shí)現(xiàn)》書(shū)籍,帶設(shè)備回家繼續(xù)深耕機(jī)器視覺(jué)開(kāi)發(fā)!
-
嵌入式
+關(guān)注
關(guān)注
5208文章
20587瀏覽量
336273 -
機(jī)器視覺(jué)
+關(guān)注
關(guān)注
165文章
4819瀏覽量
126382 -
RT-Thread
+關(guān)注
關(guān)注
32文章
1632瀏覽量
45116 -
Workshop
+關(guān)注
關(guān)注
0文章
19瀏覽量
6583
發(fā)布評(píng)論請(qǐng)先 登錄
睿擎派3562快速上手體驗(yàn)

睿擎平臺(tái)v1.7.2版本正式發(fā)布|技術(shù)集結(jié)

睿擎派文件系統(tǒng)指南:從開(kāi)發(fā)到發(fā)布全流程實(shí)踐 | 技術(shù)解析
睿擎UVC-AI方案:基于YOLO的人臉檢測(cè)系統(tǒng)開(kāi)發(fā)|技術(shù)集結(jié)

深圳站報(bào)名火熱進(jìn)行中!睿擎工業(yè)平臺(tái)線下實(shí)戰(zhàn) Workshop,親手實(shí)戰(zhàn)4小時(shí)解鎖工業(yè)級(jí)開(kāi)發(fā)!|活動(dòng)預(yù)告
上海站圓滿收官!睿擎工業(yè)開(kāi)發(fā)平臺(tái)Workshop深圳站報(bào)名開(kāi)啟!9.18,現(xiàn)場(chǎng)體驗(yàn)工業(yè)設(shè)備實(shí)戰(zhàn)開(kāi)發(fā) | 知行工坊

上海站圓滿收官!睿擎工業(yè)開(kāi)發(fā)平臺(tái)Workshop深圳站報(bào)名開(kāi)啟!9.18,現(xiàn)場(chǎng)體驗(yàn)工業(yè)設(shè)備實(shí)戰(zhàn)開(kāi)發(fā)|知行工坊
最后召集!明日睿擎工業(yè)平臺(tái)Workshop上海站開(kāi)啟!現(xiàn)場(chǎng)體驗(yàn)工業(yè)設(shè)備實(shí)戰(zhàn)開(kāi)發(fā),最終席位即將關(guān)閉!
9月4號(hào)RT-Thread睿擎工業(yè)平臺(tái)深度實(shí)戰(zhàn)Workshop上海站:4小時(shí)從環(huán)境搭建到量產(chǎn)部署,構(gòu)建遠(yuǎn)程監(jiān)控網(wǎng)關(guān)原型|產(chǎn)品
像STM32一樣輕松玩轉(zhuǎn) MPU!RT-Thread 睿擎平臺(tái) Workshop 上海站開(kāi)啟硬核實(shí)戰(zhàn)!下一城?你定!
基于睿擎派輕松玩轉(zhuǎn)Modbus工業(yè)通信
基于睿擎派輕松玩轉(zhuǎn)CANopen電機(jī)控制
睿擎平臺(tái)極簡(jiǎn)開(kāi)發(fā)重要實(shí)踐—— PinMux 配置工具 | 睿擎派試用名單公示

川商傳媒:睿擎工業(yè)開(kāi)發(fā)平臺(tái)開(kāi)啟智能化新篇章 | 媒體視角
中新社:RT-Thread攜“睿擎平臺(tái)”亮相工博會(huì) | 媒體視角



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論