 車載以太網gPTP時間同步:從協議到工程實踐
車載以太網gPTP時間同步:從協議到工程實踐

01 引言
隨著車載網絡從** CAN 總線向以太網遷移,傳統毫秒級同步精度已無法滿足多傳感器融合**、線控系統協同的需求。
比如在多傳感器時空對齊中,激光雷達的點云、攝像頭的圖像、毫米波雷達的回波信號,需在 同一時間基準下融合 。而當以 120km/h 車速計算,1ms 的時間偏差會導致 3.3cm 的空間誤差,造成自動駕駛的安全風險。
因此,gPTP 通過 ±50ns 同步精度的設計目標,為傳感器融合提供了 “ 時間錨點” 。
**02 gPTP協議 **
相較于工業場景的 ** PTP(IEEE 1588)** ,gPTP 針對車載環境做了 三項關鍵優化 :
簡化的 BMCA(最佳主時鐘算法): 減少節點角色切換頻率,避免了車載網絡拓撲變化頻繁導致的同步不穩定;
固定的消息間隔: 同步幀(Sync)默認間隔為125ms(logSyncInterval=-3),延遲請求幀(Pdelay_Req)默認間隔為1s(logPdelayReqInterval=0),降低網絡帶寬占用;
增強的時間戳機制: 支持硬件級時間戳的精準捕獲,抵消車載電磁環境對軟件時間戳的干擾。
03 Linux PTP 工具鏈
簡單來說,**LinuxPTP **并非單一工具,而是一套 模塊化的時間同步解決方案 ,其核心組件主要包括 ptp4l,phc2sys,pmc 。
ptp4l :是gPTP 協議的核心實現,主要負責時鐘角色協商(主 / 從)、時間消息收發、延遲測算與時鐘校準。支持邊界時鐘(BC)、普通時鐘(OC)兩種模式,適配車載網絡的層級拓撲;
phc2sys :是解決 “硬件時鐘與系統時鐘異步” 問題的工具。車載 ECU 通常存在 PHC(物理層硬件時鐘)與系統時鐘(OS Clock)兩個計時源,phc2sys 通過 PI調節算法,將兩者偏差控制在 10ns 以內;
pmc: 是PTP 管理客戶端,支持查詢時鐘狀態(如GET TIME_STATUS_NP)、配置參數(如SET PORT_PROPERTIES),是調試階段的 “可視化窗口”。
這套工具鏈的優勢在于 車載場景適配性 ,其自帶了automotive-master.cfg與automotive-slave.cfg配置文件,已經預設符合 IEEE 802.1AS-2011 的關鍵參數(如transportSpecific=0x1、ptp_dst_mac=01:80:C2:00:00:0E), **避免了從零開始的參數調試成本** 。
04 gPTP工程實踐
時間同步硬件選型
gPTP從協議到工程實踐,首先需要確保硬件滿足“ 時間敏感 ”特性,具體指標如下:
PHC 硬件時鐘: 需支持 IEEE 1588 硬件時間戳;
網卡驅動:
必須支持SOF_TIMESTAMPING_TX_HARDWARE與SOF_TIMESTAMPING_RX_HARDWARE標志,以確保收發時間戳由硬件直接生成,而非軟件間接計算,從而避免軟件棧延遲帶來的誤差。一般可通過ethtool -T eth0命令驗證。
主從時鐘配置要點
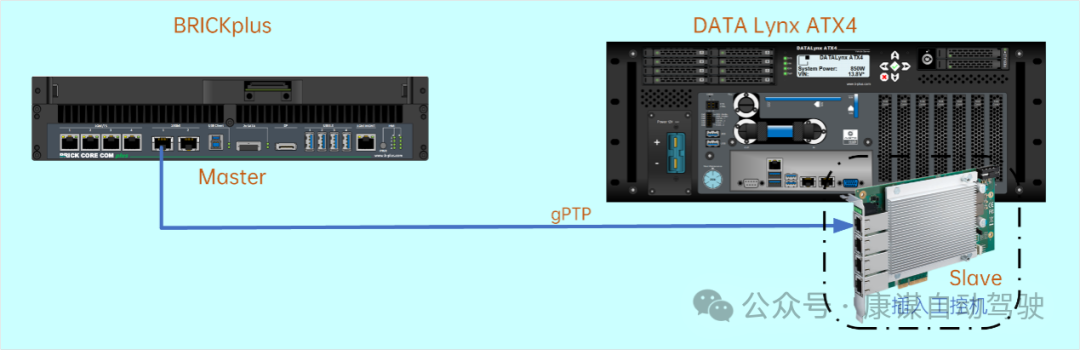
車載網絡的時間同步采用 “ 主從架構 ”,其核心是通過配置文件明確節點角色與 行為邊界 。如下圖所示,以工控機搭建案例實現gPTP時間同步配置。
主時鐘配置 (automotive-master.cfg),通常部署在域控制器或中央網關,需重點配置:
- gmCapable=1: 聲明具備 “全局主時鐘(GM)” 能力;
- masterOnly=1: 強制為主模式,避免 BMCA 算法導致的角色切換;
- logSyncInterval=-3: 同步消息間隔設為 125ms(2^-3 秒),平衡精度與帶寬;
- delay_mechanism=P2P: 采用點對點延遲機制,減少多節點級聯的誤差累積。
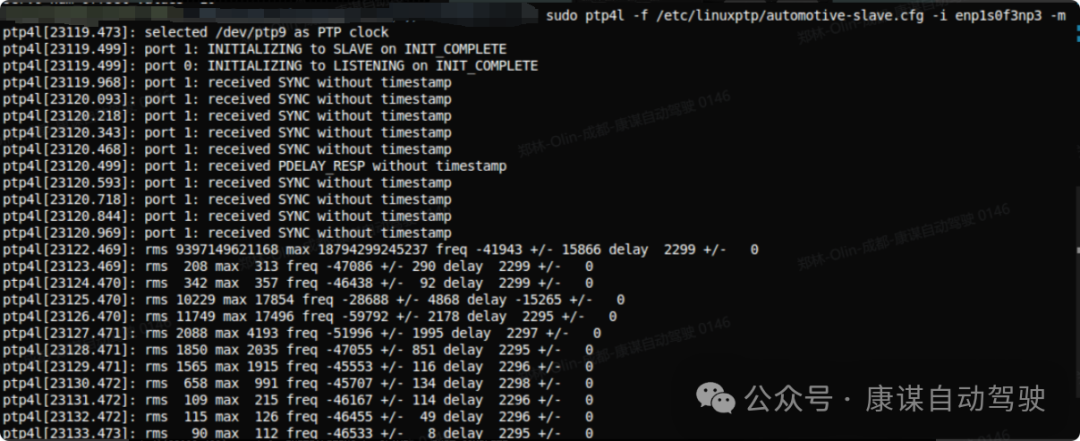
啟動命令需指定接口與 配置文件 :sudo ptp4l -i eth0 -f automotive-master.cfg -m(-m參數用于輸出詳細日志,便于調試)。

從時鐘配置 (automotive-slave.cfg),通常部署在傳感器節點、執行器 ECU,關鍵配置包括:
- slaveOnly=1: 固定為從模式,避免搶占主時鐘角色;
- step_threshold=1: 允許時間跳變校正(初始同步階段);
- servo_offset_threshold=30: 當偏差超過 30ns 時啟動 PID 調節;
- ignore_source_id=1: 忽略主時鐘源 ID 變化,增強容錯性。
啟動后需通過pmc命令驗證同步狀態:pmc -u -b 0 -d 1 "GET TIME_STATUS_NP"(正常狀態下offsetFromMaster應穩定在 ±50ns 以內)。
系統級同步(PHC 與系統時鐘對齊)
當ptp4l 完成了 PHC 時鐘的同步,若 ECU 的系統時鐘 (如 Linux CLOCK_REALTIME) 與 PHC 脫節 ,應用層仍會 獲取錯誤時間 。這一步我們可以通過** phc2sys 工具**解決:
- sudo phc2sys -s eth0 -c CLOCK_REALTIME -O 50 -m;
- -s eth0: 以網卡 PHC 為時間源;
- -c CLOCK_REALTIME: 同步至系統時鐘;
- -O 50: 50表示目標偏移量設為50μs,允許phc2sys在同步時存在一個50μs的容忍范圍,避免頻繁調節;
- -m: 輸出調節日志。
調試時需關注 offset值 (PHC 與系統時鐘偏差),穩定后 應≤10ns ,否則 需檢查系統負載 (高 CPU 占用會影響調節精度)。
05 總結
在車載以太網的技術棧中,gPTP 不像 CAN FD、SOME/IP 那樣直觀可見,卻像 “ 神經系統 ” 般支撐著整個系統的協同運作。
LinuxPTP 作為開源工具鏈,為 gPTP 的工程落地提供了 低成本路徑 ,但從協議到實踐開發,還需完成硬件適配、主從時同配置、系統級同步等步驟。
審核編輯 黃宇
-
以太網
+關注
關注
41文章
5997瀏覽量
180806 -
時間同步
+關注
關注
1文章
226瀏覽量
10631
發布評論請先 登錄

汽車CAN/以太網一體化測試板:虹科多協議車載測試解決方案

RDMA設計12:融合以太網協議棧設計1
車載以太網轉換器:專業選擇指南與康謀NETLion系列深度解析
自動駕駛數據采集時間同步指南:方法、挑戰、場景與康謀解決方案
虹科峰會 | 前沿洞悉!車載以太網物理層協議解析與診斷



車載以太網入坑指南,從小白到懂哥的進階之路
以太網入門:從零開始,掌握以太網基礎知識!

泰克示波器MDO3024在車載以太網測試中的應用




 工商網監
工商網監
評論