") 一文讀懂自適應(yīng)巡航系統(tǒng)
一文讀懂自適應(yīng)巡航系統(tǒng)

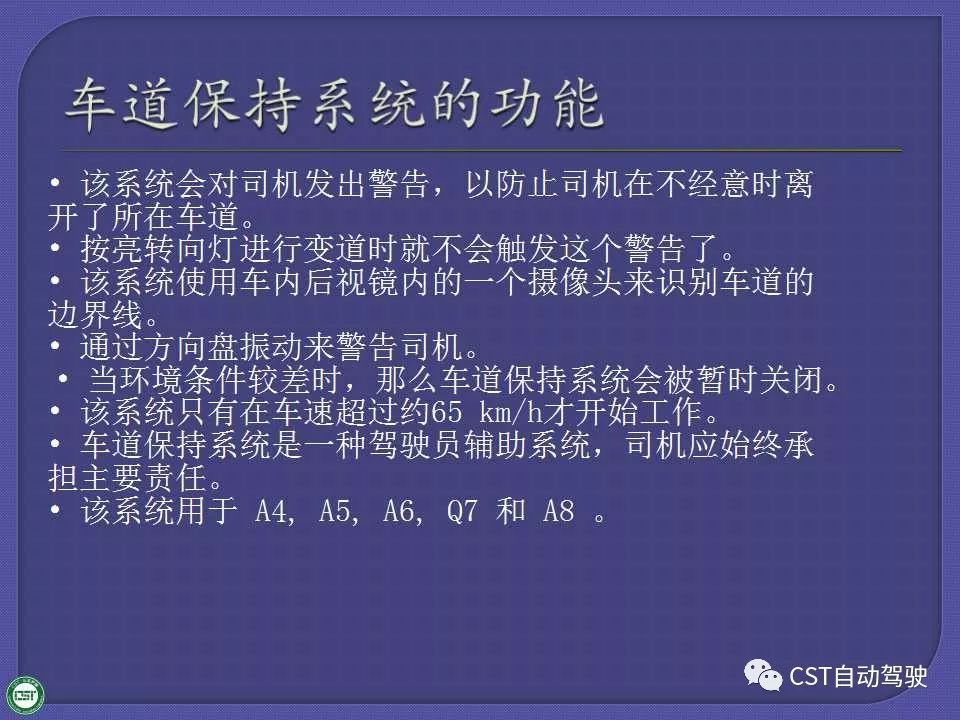
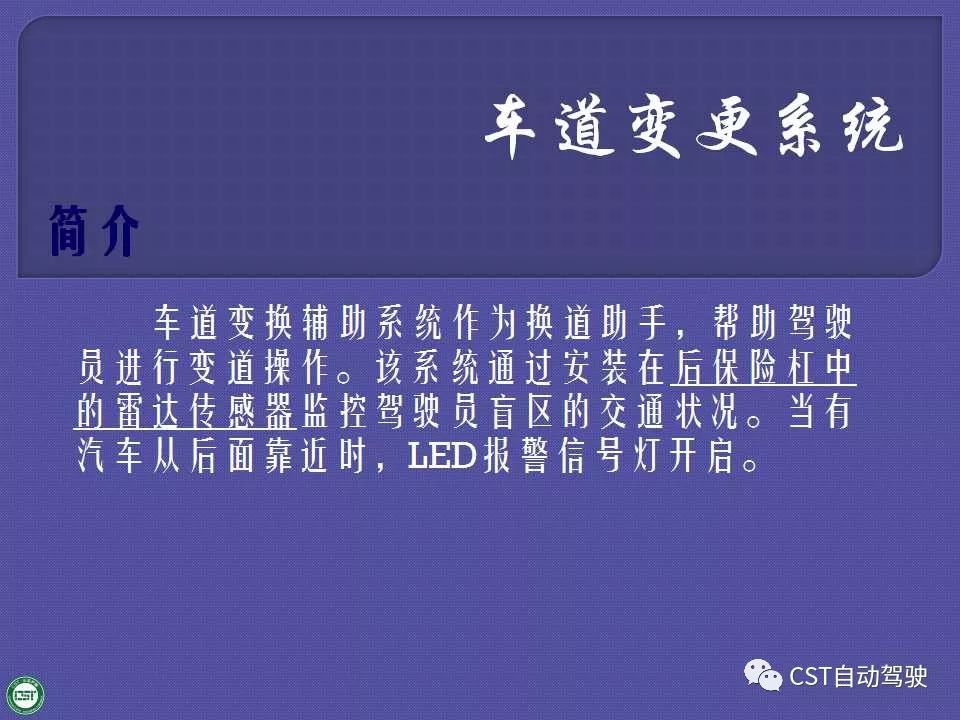
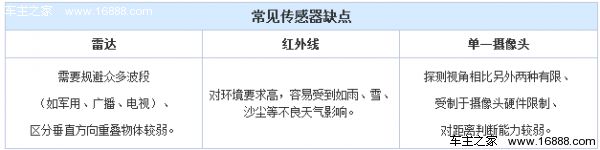
什么是自適應(yīng)巡航系統(tǒng)?包括什么?什么是車(chē)道保持輔助系統(tǒng)?什么是車(chē)道變更系統(tǒng)?本文給你解答。










聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
汽車(chē)電子
+關(guān)注
關(guān)注
3045文章
9040瀏覽量
173017 -
豐田
+關(guān)注
關(guān)注
6文章
809瀏覽量
42283 -
大眾
+關(guān)注
關(guān)注
1文章
851瀏覽量
35235 -
雷達(dá)傳感器
+關(guān)注
關(guān)注
3文章
309瀏覽量
35359
原文標(biāo)題:干貨 | 自適應(yīng)巡航 車(chē)道保持 車(chē)道變更系統(tǒng)(PPT)
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車(chē)科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
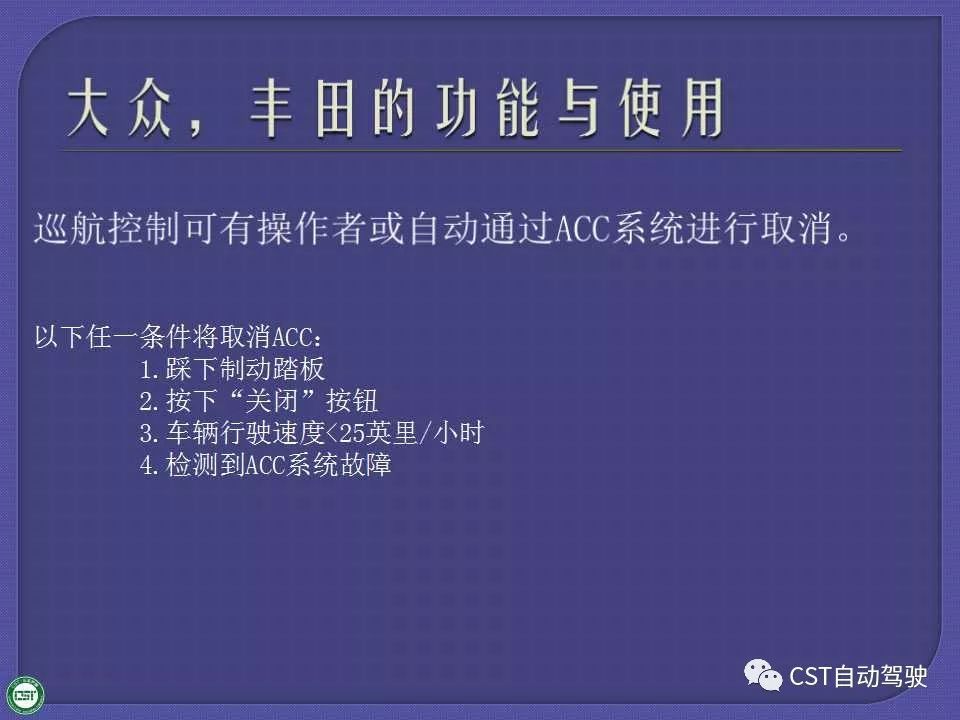
談?wù)凙CC自適應(yīng)巡航技術(shù)的優(yōu)缺點(diǎn)
自適應(yīng)巡航(ACC)比較智能,且一般在較低的速度下即能進(jìn)入巡航,除了高速路況,也能適用于城市路況,走走停停的路都可以。
發(fā)表于 11-15 12:00
?1.8w次閱讀
什么是汽車(chē)自適應(yīng)巡航控制系統(tǒng)
什么是汽車(chē)自適應(yīng)巡航控制系統(tǒng)
自適應(yīng)巡航控制系統(tǒng)與前面介紹的
發(fā)表于 03-17 13:34
?3830次閱讀
詳細(xì)剖析ACC自適應(yīng)巡航系統(tǒng)
acc它的全稱(chēng)叫Adaptive CruiseControl自適應(yīng)巡航控制系統(tǒng),它是一種智能化的自動(dòng)控制系統(tǒng),它是在早已存在的
詳細(xì)介紹凱迪拉克超級(jí)巡航系統(tǒng)
實(shí)際上超級(jí)巡航系統(tǒng)定義為“高級(jí)駕駛輔助系統(tǒng)”,而非“自動(dòng)駕駛輔助系統(tǒng)”,也就是說(shuō)“人”仍是車(chē)輛核心單位,而非超級(jí)巡航,
ACC自適應(yīng)巡航技術(shù)——自動(dòng)駕駛
現(xiàn)如今大家自駕長(zhǎng)途越來(lái)越多,前不久我自己也跑了好幾個(gè)長(zhǎng)途,最多一天接近1000公里,這個(gè)時(shí)候如果沒(méi)人可以換著開(kāi)的話,有個(gè)行車(chē)助手就顯得很關(guān)鍵了,這就是今天要聊的ACC自適應(yīng)巡航技術(shù)。
自適應(yīng)巡航是什么?它與定速巡航有區(qū)別嗎?
首先要肯定的是自適應(yīng)巡航與定速巡航是有區(qū)別的。科技的發(fā)展幫助越來(lái)越多的車(chē)裝配上定速巡航系統(tǒng),自適應(yīng)
自適應(yīng)巡航是什么
自適應(yīng)巡航控制系統(tǒng)是一種智能化的自動(dòng)控制系統(tǒng),它是在早已存在的巡航控制技術(shù)的基礎(chǔ)上發(fā)展而來(lái)的。在
ACC自適應(yīng)巡航控制系統(tǒng)介紹
本文是關(guān)于ACC自適應(yīng)巡航控制系統(tǒng)的介紹,羅孚從個(gè)人視角出發(fā),描述對(duì)ACC系統(tǒng)的理解,以及在一些使用場(chǎng)景下的思考。
Traxen推出智能自適應(yīng)巡航控制系統(tǒng)iQ-Cruise
據(jù)外媒報(bào)道,底特律技術(shù)公司Traxen推出智能自適應(yīng)巡航控制系統(tǒng)iQ-Cruise,專(zhuān)用于傳統(tǒng)電動(dòng)商用車(chē),也適用于商用車(chē)后市場(chǎng)客戶(hù)和OEM客戶(hù)。
汽車(chē)自適應(yīng)巡航控制系統(tǒng)(ACC)技術(shù)詳解
自適應(yīng)巡航控制的確提升了高速行駛的舒適性能,而且起到了非常必要的控制和預(yù)警作用。但是必須重申,該功能并不具有全力制動(dòng)的效果,也并不能剎停車(chē)輛,所以在行車(chē)過(guò)程中依然要靠駕駛員對(duì)車(chē)輛進(jìn)行最終狀態(tài)的操作。
發(fā)表于 01-30 09:47
?5155次閱讀
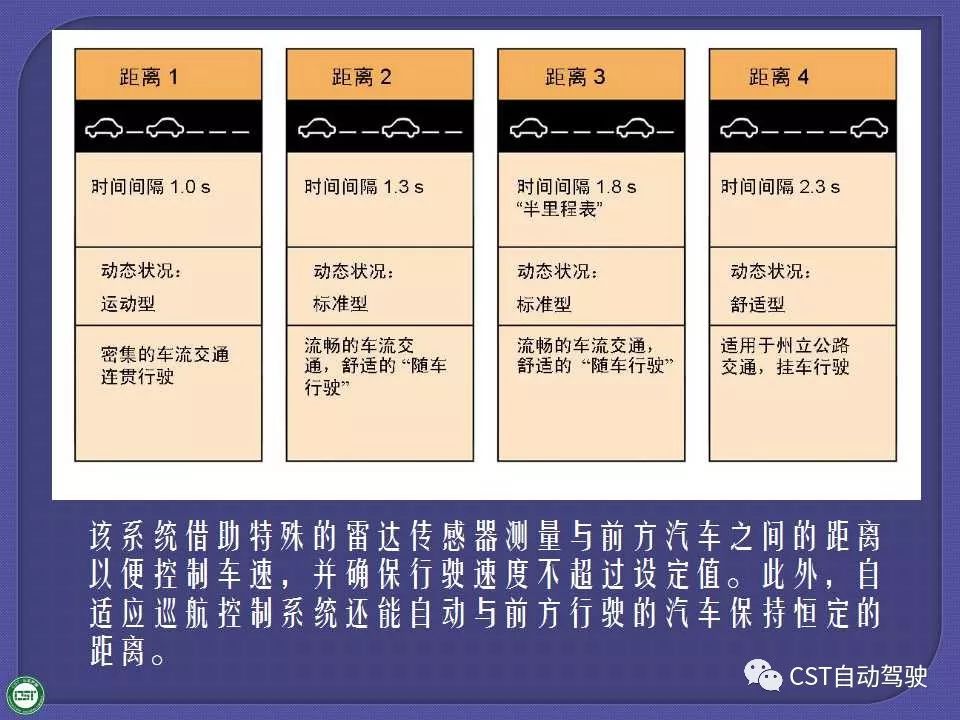
自適應(yīng)巡航控制系統(tǒng)的工作原理及應(yīng)用
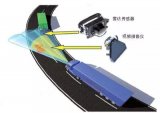
自適應(yīng)巡航控制(ACC)系統(tǒng):在汽車(chē)行駛過(guò)程中,車(chē)距傳感器持續(xù)掃描汽車(chē)前方道路,同時(shí)輪速傳感器采集車(chē)速信號(hào);當(dāng)前汽車(chē)與前方車(chē)輛之間的距離小于或大于安全車(chē)距時(shí)。
發(fā)表于 03-27 12:56
?4508次閱讀
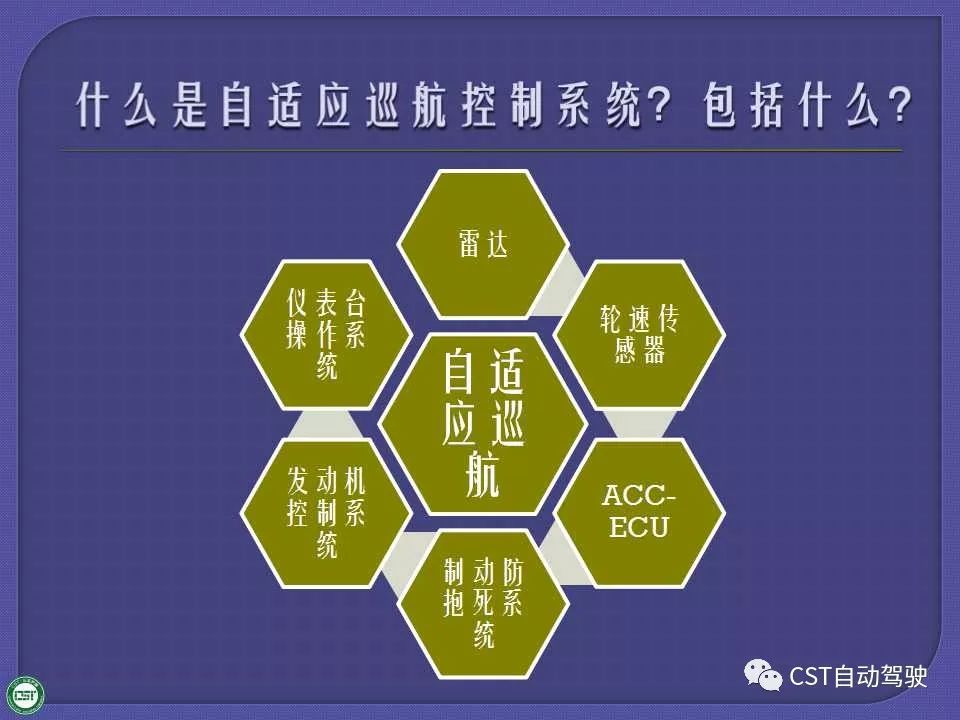
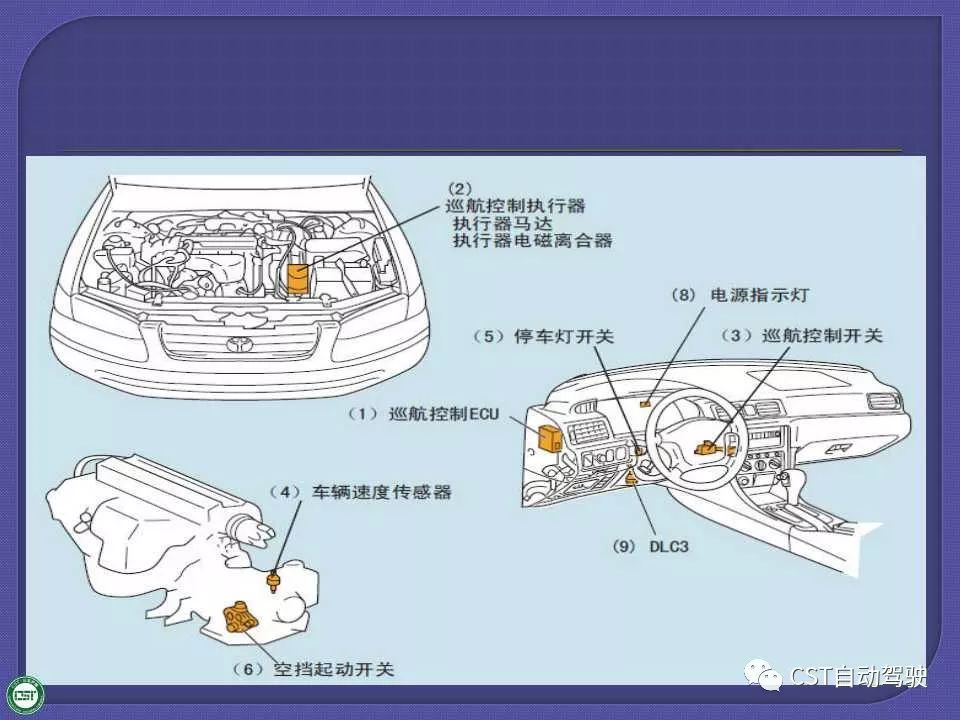
自適應(yīng)巡航系統(tǒng)的組成及原理
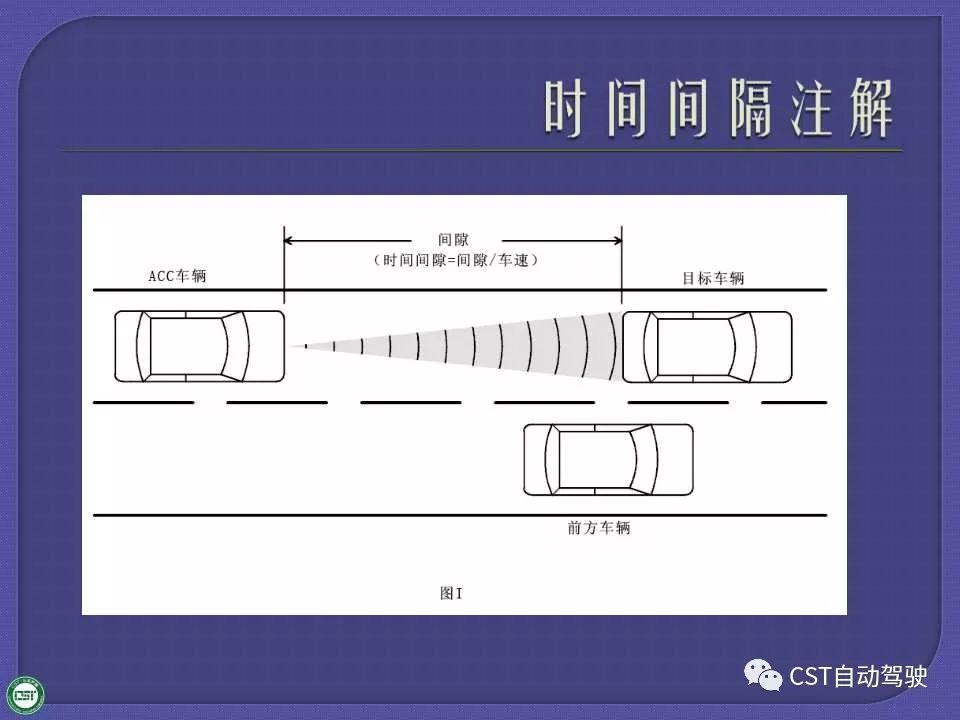
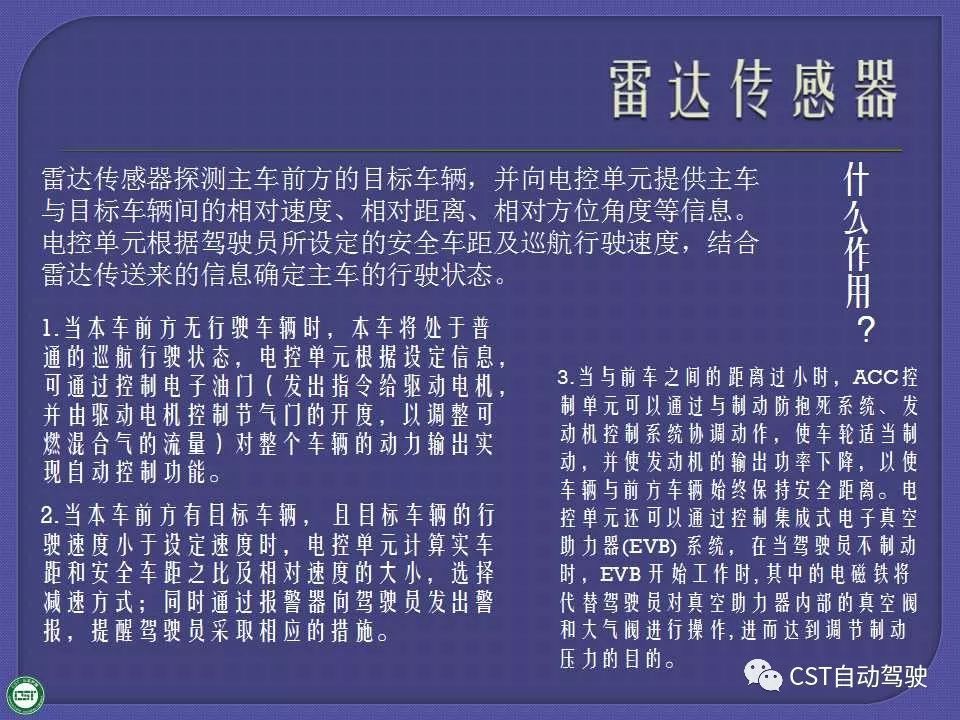
在ACC系統(tǒng)中,測(cè)距雷達(dá)用于測(cè)量自車(chē)與前方車(chē)輛的車(chē)頭距、相對(duì)速度、相對(duì)加速度,是自適應(yīng)巡航控制系統(tǒng)中的關(guān)鍵設(shè)備之一,也是決定該
發(fā)表于 11-01 09:55
?2721次閱讀




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論