 破解柔性生產難題:知識驅動具身智能工業機器人的實戰應用指南
破解柔性生產難題:知識驅動具身智能工業機器人的實戰應用指南

在工業4.0邁向工業5.0的進程中,傳統的“固定編程”機器人已無法滿足多品種、小批量、高柔性的生產需求。隨著人工智能與大模型技術的爆發,具身智能(Embodied Intelligence) 成為解鎖工業機器人潛力的關鍵。然而,如何在復雜多變的工業場景中讓機器人擁有“常識”和“專業知識”?本文將深度解析前沿的知識驅動具身智能工業機器人(EIIR)技術框架,探討其如何成為下一代智能制造的核心技術范式。

一、技術演進:為什么工業機器人需要“知識驅動”?
傳統的工業機器人依賴于“示教-再現”模式,雖然精度高,但缺乏適應性。當工件位置偏移、型號變更或環境光線變化時,系統往往需要停機重調 。
為了解決這一問題,學界與產業界開始探索具身智能。具身智能強調智能體不僅要有算法“大腦”,更要有能感知和行動的“身體”,通過與物理環境的交互獲取數據、學習技能 。
知識驅動的核心理念:
要讓機器人在工業場景中高效、準確、安全地工作,必須賦予其三類知識 :
通用知識: 對物理世界的基礎認知(如重力、碰撞)。
作業環境知識: 實時感知車間布局、設備位置、動態障礙(語義地圖)。
操作對象知識: 了解工藝流程、工件屬性和裝配關系(知識圖譜)。
富唯智能提出的知識驅動具身智能工業機器人技術框架,正是為了解決這三類知識的獲取、表征與應用問題,實現了從“自動化設備”到“智能化工人”的跨越。
二、深度解析:知識驅動具身智能工業機器人(EIIR)五大核心模塊
根據清華大學深圳國際研究生院團隊(項目頁面: Github[ citation:1])及富唯智能的商業化實踐,一個完整的EIIR框架包含以下五大模塊:
1. 世界模型:構建工業語義地圖
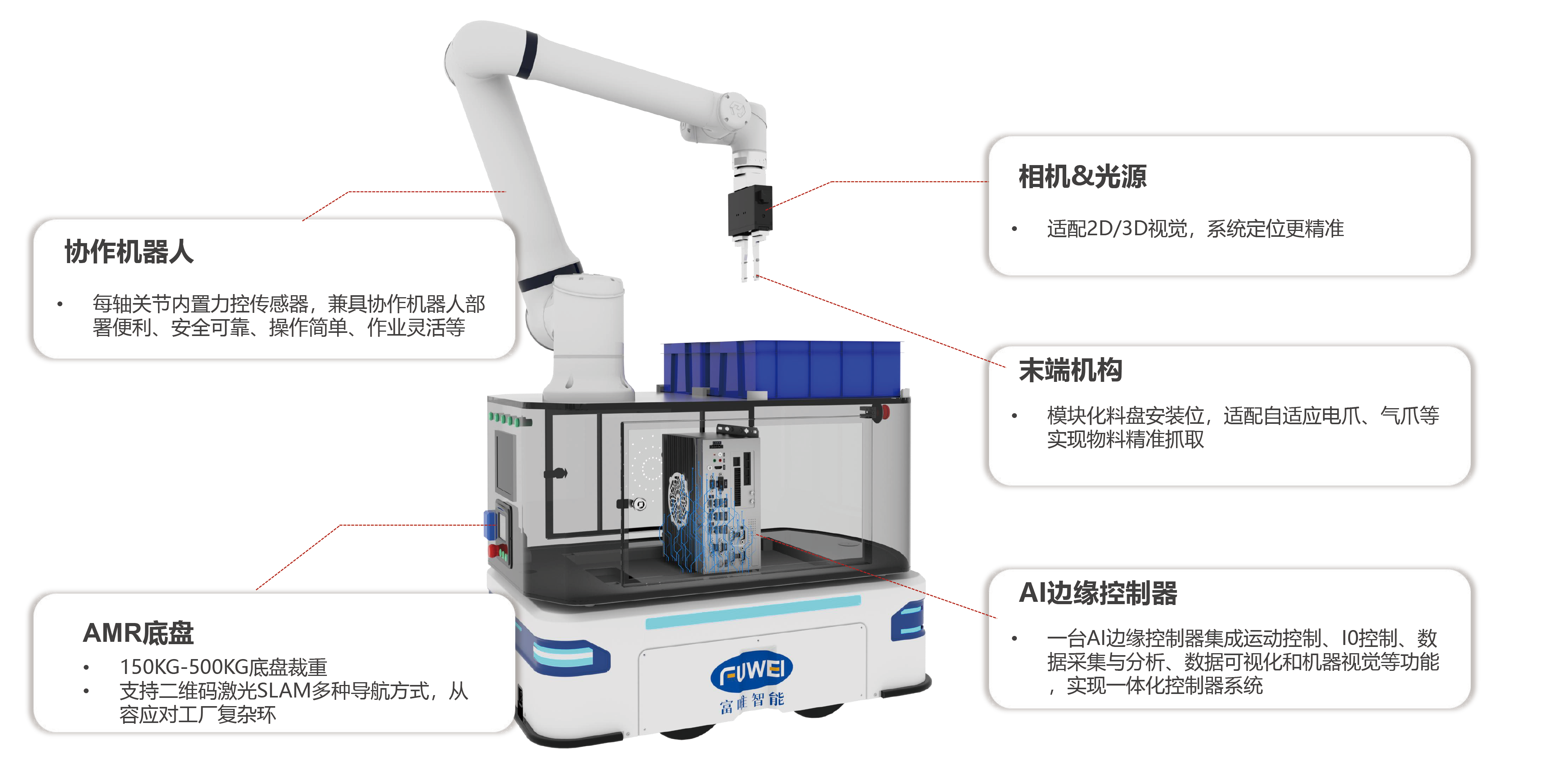
機器人需要理解“車間語義”。例如,“精密儀器區需降速通行”或“料箱位于上料位”。富唯智能通過融合2D/3D視覺與多模態感知,構建包含環境信息和語義規則的動態語義地圖 。
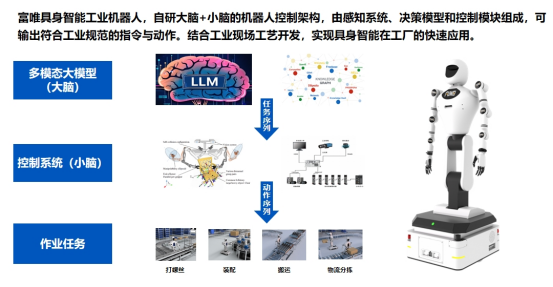
2. 大腦:基于GRID大模型的任務規劃
這是整個框架的核心。傳統大模型在工業應用中容易出現“幻覺”,輸出不符合物理規律的指令。富唯智能全球獨創的GRID(任務規劃大模型) 專門針對工業場景優化,通過融合知識圖譜(包含工藝流程)和語義地圖(包含環境信息),使得模型輸出的指令不僅準確,而且與實際物理環境緊密結合 。數據顯示,其在工業任務準確率上比通用大模型高出83% 。
3. 小腦:語言-技能的多層控制模型
“大腦”下達指令(如“抓取A工件放到B夾具”)后,“小腦”負責分解為原子技能(移動到A、視覺定位、調整角度、抓取、移動、放置)。富唯智能自研的小腦模型通過一體化控制器實現了“手、腳、眼、腦”的協同,保證了工業要求的精度(如振動系數小于0.53C)和穩定性 。
4. 虛實融合仿真器
利用數字孿生技術,在實際部署前進行百萬次仿真訓練,降低現場調試時間,真正實現復合機器人的“15分鐘快速部署” 。
三、技術縱深:知識圖譜+大模型,如何避免“工業幻覺”
在2025年召開的IEEE/ASME國際先進智能機電系統會議上,北京理工大學的研究指出,在人機協作中,僅靠大模型存在領域知識鴻溝,必須通過知識圖譜進行增強 。
富唯智能的GRID大模型正是采用了這一路徑:
數據層: 輸入生產線、倉庫物料等工業場景信息。
知識層: 調用構建好的行業知識圖譜,包含標準的工藝流程(如“擰螺絲”的扭矩參數、“裝配”的先后順序)。
推理層: 大模型結合上述信息進行推理,輸出符合工業規范的指令。
結語:
知識驅動的具身智能工業機器人技術框架,正通過“大腦”的認知推理與“小腦”的精準執行,重塑我們對制造業的想象。正如清華大學團隊所言,EIIR技術正在塑造下一代工業機器人,并為智能制造提供全新的技術范式 。對于追求柔性、效率和智能化轉型的企業來說,擁抱這一框架,意味著搶占未來智造的制高點。
審核編輯 黃宇
-
工業機器人
+關注
關注
91文章
3534瀏覽量
98184 -
具身智能
+關注
關注
0文章
395瀏覽量
859
發布評論請先 登錄

具身智能交流會
從“機械臂”到“智能體”:人形機器人在工廠的應用如何開啟具身智能革命

工業機器人的未來發展方向:富唯智能以具身智能重構人機協作新范式
具身智能時代來臨,靈途科技助力人形機器人“感知升級”
LeadeRobot具身智能應用標桿:柔韌自動充電機器人加速智能化出行體驗閉環


佛山智能裝備院與華數機器人在具身智能工業機器人領域的研究成果

智造升級新引擎:具身智能工業機器人仿真軟件推薦與富唯智能的突圍之道



 工商網監
工商網監
評論