 NVIDIA榮獲CVPR 2025輔助駕駛國際挑戰賽冠軍
NVIDIA榮獲CVPR 2025輔助駕駛國際挑戰賽冠軍

NVIDIA 在本周美國田納西州舉辦的國際計算機視覺與模式識別會議(CVPR)上榮獲“端到端輔助駕駛”賽道冠軍。這一消息是在“自主系統具身智能研討會”上宣布的。
這標志著 NVIDIA 連續第二年在“大規模端到端駕駛”類別中榮登榜首,也是連續第三年在 CVPR 上獲得挑戰賽大獎。
今年挑戰賽的主題是“實現通用的具身系統”——基于數據驅動的非反應式輔助駕駛仿真框架 NAVSIM v2。
本次挑戰賽為研究人員提供了一個探索應對突發情況方法的機會,使他們不再局限于僅使用真實的人類駕駛數據,從而加速開發更智能、更安全的智能汽車。
生成安全、自適應的駕駛軌跡
本次挑戰賽參賽者的任務是在半反應堆仿真中根據多傳感器數據生成駕駛軌跡,測試車輛的計劃在開始時是固定不變的,但交通背景會動態變化。
參賽作品采用擴展預測駕駛員模型評分進行評估,該評分可衡量現實世界和合成場景中的安全性、舒適性、合規性和泛化性,從而突破穩健且可泛化的輔助駕駛研究界限。
NVIDIA 輔助駕駛應用研究團隊的關鍵創新是泛化軌跡評分(GTRS)方法,該方法可生成各種軌跡,并逐步篩選出最佳軌跡。
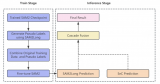
GTRS 模型架構展示了一個統一的系統,可利用擴散和基于詞匯的軌跡生成不同的駕駛軌跡并評分。
GTRS 引入了涵蓋各種情況的粗略軌跡集和適用于安全關鍵情況的細粒度軌跡集的組合,這些軌跡集使用基于環境的擴散策略創建。GTRS 使用從依賴感知的指標中提煉出來的 Transformer 解碼器,重點關注安全性、舒適性和交通規則合規性。該解碼器通過捕捉相似軌跡之間細微但關鍵的差異,逐漸篩選出最具可能性的候選軌跡。
事實證明,該系統能夠很好地適用于各種場景,在具有挑戰性的基準測試中獲得了優異的結果,并能夠在各種富有挑戰性的駕駛條件下實現可靠的自適應軌跡選擇。
NVIDIA 在 CVPR 會議中的汽車領域研究成果
NVIDIA 在 CVPR 2025 上提交了 60 多篇論文,涵蓋汽車、醫療、機器人等領域。
在汽車領域,NVIDIA 研究人員正在通過感知、規劃和數據生成方面的創新來推動物理 AI 的發展。今年,有三篇 NVIDIA 論文獲得了最佳論文獎提名:FoundationStereo、Zero-Shot Monocular Scene Flow 和 Difix3D+。
以下 NVIDIA 論文展示了在立體深度估計、單目運動理解、3D 重建、閉環規劃、視覺語言建模和生成式仿真方面取得的突破性進展,所有這些對于構建更安全、更泛化的輔助駕駛都非常重要:
DiffusionRenderer:基于視頻擴散模型的神經逆向渲染和正向渲染(可在官網博客中閱讀更多內容。)
FoundationStereo:零樣本立體匹配(獲得最佳論文提名)
實際場景零樣本單目場景流預測(獲得最佳論文提名)
Diffix3D+:使用單步擴散模型改進 3D 重建(獲得最佳論文提名)
3DGUT:在高斯分裂中啟用失真攝像頭和二次光線
標記化交通模型的閉環監督式微調
零樣本 4D 激光雷達全景分割
NVILA:高效前沿視覺語言模型
RADIO Amplified:改進聚合視覺基礎模型的基準
OmniDrive:借助反事實推理實現輔助駕駛的整體視覺語言數據集
探索 CVPR 上的汽車研討會和教程,包括:
數據驅動型輔助駕駛仿真研討會,由 NVIDIA 輔助駕駛研究高級總監 Marco Pavone 和 NVIDIA AI 研究副總裁 Sanja Fidler 主講
輔助駕駛研討會,由 NVIDIA 高級研究經理 Laura Leal-Taixe 主講
利用基礎模型理解開放世界 3D 場景研討會,由 Leal-Taixe 主講
面向所有領域的安全 AI,由 NVIDIA 輔助駕駛應用研究總監 Jose Alvarez 主講
基于 V2X 的協作式輔助駕駛基礎模型研討會,由 Pavone 和 Leal-Taixe 主講
多智能體具身智能系統迎接生成式 AI 時代研討會,由 Pavone 主講
計算機視覺中的 LatinX 研討會,由 Leal-Taixe 主講
探索新一代數據研討會,由 Alvarez 主講
基于 GPU 的全棧深度學習和基礎模型加速,由 NVIDIA 主導
通過基礎模型實現連續數據循環,由 NVIDIA 主導
輔助駕駛基礎模型蒸餾,由 NVIDIA 主導
-
NVIDIA
+關注
關注
14文章
5678瀏覽量
110057 -
輔助駕駛
+關注
關注
1文章
432瀏覽量
15829
原文標題:CVPR 2025 | NVIDIA 在 CVPR 輔助駕駛國際挑戰賽“端到端輔助駕駛”賽道中連續奪冠
文章出處:【微信號:NVIDIA_China,微信公眾號:NVIDIA英偉達】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
是德科技與Sateliot聯合項目榮獲6G創新挑戰賽獎項
AICAS 2026 Grand Challenge全球挑戰賽啟動
摩爾線程在SIGGRAPH Asia 2025斬獲3DGS重建挑戰賽銀獎

德賽西威榮獲2025鈴軒獎前瞻組合輔助駕駛類金獎
第三屆ICPC與華為挑戰賽冠軍杯圓滿結束
傳音TEX AI團隊斬獲ICCV 2025大型視頻目標分割挑戰賽雙料亞軍
東風睿立達斬獲NEVC 2025中國新能源商用車挑戰賽六項大獎
2025 EDA精英挑戰賽華大九天賽題發布

2025 EDA精英挑戰賽紫光同創賽題發布

2025 EDA精英挑戰賽概倫電子賽題發布

地平線H-RDT模型斬獲CVPR 2025大賽冠軍

易控智駕榮獲計算機視覺頂會CVPR 2025認可
傳音多媒體團隊攬獲CVPR NTIRE 2025兩項挑戰賽冠亞軍,推動視頻畫質升級

傳音多媒體團隊攬獲CVPR NTIRE 2025兩項挑戰賽冠亞軍




 工商網監
工商網監
評論