") 樹莓派驅(qū)動的智能假肢:用眼感知,用心行走!
樹莓派驅(qū)動的智能假肢:用眼感知,用心行走!

通過將攝像頭安裝在眼鏡上或肢體本身,來使計算機(jī)視覺系統(tǒng)改善下肢假肢的運(yùn)動能力。
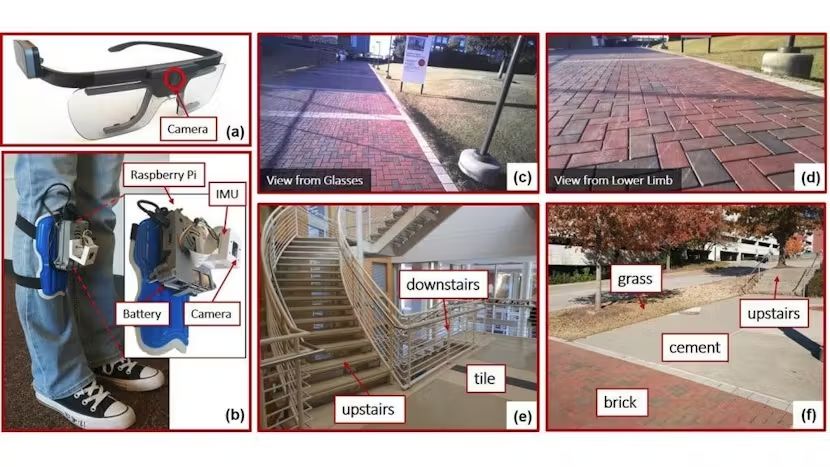
研究團(tuán)隊測試了兩套計算機(jī)視覺系統(tǒng):一套佩戴于眼鏡上,另一套則安裝于腿部。
北卡羅來納州立大學(xué)與北卡羅來納大學(xué)教堂山分校的研究人員發(fā)布了一篇論文,闡述了如何借助計算機(jī)視覺技術(shù)——結(jié)合部分由樹莓派驅(qū)動的預(yù)測機(jī)制——助力配備下肢機(jī)器人假肢的用戶在不平整路面上更自然、更安全地行走。
論文作者之一、副教授Edgar Lobaton解釋道:“下肢機(jī)器人假肢需根據(jù)用戶所處地形執(zhí)行不同動作。我們構(gòu)建的框架能讓假肢中的人工智能預(yù)測用戶即將踏上的地形類型,量化與此預(yù)測相關(guān)的不確定性,并將這種不確定性納入決策過程。”
為驗證這一概念,研究團(tuán)隊打造了兩套計算機(jī)視覺系統(tǒng):一套集成于眼鏡中,另一套則安裝于下肢假肢上,圍繞樹莓派單板計算機(jī)、攝像頭以及慣性測量單元(IMU)構(gòu)建。論文摘要指出:“借助貝葉斯神經(jīng)網(wǎng)絡(luò)(BNNs),我們的框架能夠量化由不同因素(如觀測噪聲、訓(xùn)練數(shù)據(jù)不足或存在偏差)引發(fā)的不確定性,并為在線決策生成經(jīng)過校準(zhǔn)的預(yù)測概率。”
“我們的框架在便攜嵌入式系統(tǒng)上的推理時間每幀不到80毫秒。本研究成果或可推動在可靠決策、高效傳感器融合以及各類應(yīng)用中智能系統(tǒng)設(shè)計的創(chuàng)新上下文識別策略發(fā)展。”
論文共同作者Helen Huang補(bǔ)充道:“將計算機(jī)視覺技術(shù)融入可穿戴機(jī)器人控制軟件是一個激動人心的新研究領(lǐng)域。我們發(fā)現(xiàn),同時使用兩個攝像頭效果良好,但需要大量計算資源,成本可能也較高。不過,我們還發(fā)現(xiàn)僅使用安裝于下肢的攝像頭也能取得不錯效果——特別是在短期預(yù)測方面,比如預(yù)測接下來一兩步的地形情況。”
原文地址:
https://www.hackster.io/news/raspberry-pi-powered-computer-vision-system-calculates-uncertainty-to-make-robotic-prosthetics-safer-5e3dbc2a1391
-
視覺系統(tǒng)
+關(guān)注
關(guān)注
3文章
378瀏覽量
31828 -
樹莓派
+關(guān)注
關(guān)注
122文章
2078瀏覽量
110462
發(fā)布評論請先 登錄
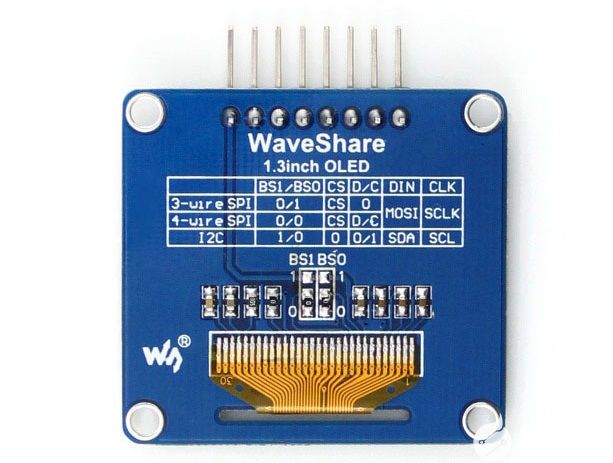
樹莓派教程 詳解樹莓派驅(qū)動OLED模塊
樹莓派用什么語言編程_樹莓派python編程詳解
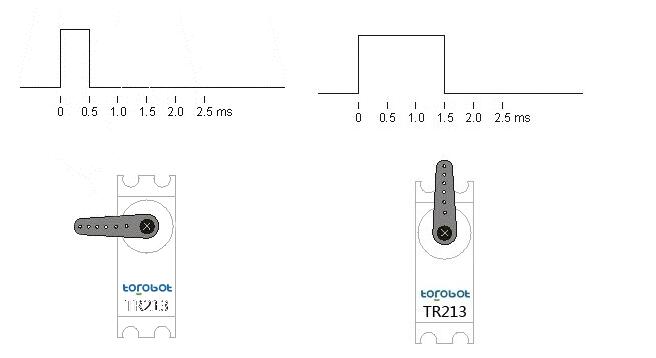
樹莓派驅(qū)動舵機(jī)介紹_樹莓派驅(qū)動舵機(jī)代碼
樹莓派的學(xué)習(xí)設(shè)計方案合集
樹莓派驅(qū)動步進(jìn)電機(jī)

樹莓派控制步進(jìn)電機(jī)
用 樹莓派 Zero 打造的智能漫游車!
樹莓派分類器:用樹莓派識別不同型號的樹莓派!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論