 從1ms到10ms,看懂EtherCAT與CANopen控制周期的關鍵差別!
從1ms到10ms,看懂EtherCAT與CANopen控制周期的關鍵差別!

在工業自動化、機器人、運動控制、工控系統這些領域,控制周期的重要性不言而喻。你系統響應慢了半拍,輕則產線停頓,重則設備撞機。這時候通訊協議就顯得尤為關鍵,尤其是兩個老牌選手:EtherCAT 和 CANopen。
今天咱們就來聊一聊它倆在控制周期上的差異,從底層通訊原理聊到實際使用效果,務求讓你看完這篇就能拍板決定哪個更適合你的系統!
 EtherCAT與CANopen控制周期的關鍵差別
EtherCAT與CANopen控制周期的關鍵差別一、什么是控制周期?為啥這么重要?
控制周期,說白了,就是控制器給現場設備下命令、收反饋的間隔時間。它直接決定了你的系統反應速度,也就是“快不快、穩不穩”的核心指標。
控制周期 | 系統響應表現 | 適用場景 |
| 1ms以下 | 高速、高精控制 | 運動控制、機器人 |
| 5~10ms | 中速控制 | 工業自動化設備 |
| 10ms以上 | 低速、非實時控制 | 數據采集、監控系統 |
二、EtherCAT和CANopen是啥?一張表格看清它倆“出身”
| 協議名稱 | 全稱 | 基礎協議 | 發布時間 | 最大帶寬 | 通訊方式 |
| EtherCAT | Ethernet for Control Automation Technology | 以太網 | 2003年 | 100Mbps | 主從結構,環形/線型 |
| CANopen | Controller Area Network open protocol | CAN總線 | 1994年 | 1Mbps(理論值) | 主從結構,線型 |
總結:EtherCAT是基于工業以太網的高速通訊協議,而CANopen則是經典的現場總線協議,成熟但速率有限。
三、控制周期差在哪?三方面講透
1. 帶寬差異決定上限
● CANopen:帶寬理論最大1Mbps,但由于總線競爭和節點數量,實際應用中一般不超過500kbps,數據幀小(最大8字節),控制周期通常在10ms以上。
●EtherCAT:基于100Mbps全雙工以太網,支持幀中嵌套數據傳輸,不需要每個節點單獨確認,可以實現1ms甚至更低的控制周期。
真實案例:某機器人廠商測試中,同樣30個節點控制,CANopen控制周期為16ms,而EtherCAT穩定在0.8ms,響應速度提升近20倍。
2. 數據處理機制
●CANopen:主站輪詢每個節點,等待響應,適合低頻數據更新場景。
●EtherCAT:數據“順流而下”,一幀數據在經過每個從站時直接讀寫,無需逐個確認,非常高效。
 EtherCAT與CANopen控制周期的關鍵差別
EtherCAT與CANopen控制周期的關鍵差別3. 同步能力
●CANopen:支持SYNC對象同步,但不同節點響應有延遲,時間抖動大。
●EtherCAT: 內置分布式時鐘系統(Distributed Clocks),所有從站可以在微秒級精準同步,適合高精度同步控制場合。
四、使用場景怎么選?一句話看清楚
| 應用場景 | 推薦協議 | 原因說明 |
| 多軸運動控制 | EtherCAT | 控制周期短,數據同步精準,實時性高 |
| 傳感器數據采集 | CANopen | 通訊穩定、實現簡單,適合數據更新頻率低的場景 |
| 高速包裝設備 | EtherCAT | 對響應時間要求高,CANopen控制周期不夠快 |
| 工業測控系統 | CANopen | 成熟穩定,成本低,控制周期不是瓶頸的可用 |
五、現實部署中還有啥“坑”要注意?
很多企業部署EtherCAT時會踩幾個常見的坑,比如:
1. 硬件兼容問題:EtherCAT對網卡和主控平臺有要求,不是所有以太網設備都支持實時處理。
2. 網絡拓撲結構:雖然支持星型/樹型,但推薦使用環形結構保障容錯能力。
3. 主站性能瓶頸:控制周期低的代價是CPU負載高,主站要選性能強的嵌入式平臺。
而CANopen雖然對硬件要求低,但節點一多,容易造成數據擁堵、響應慢等問題,控制周期不穩定也是常見“投訴項”。
六、真實案例:運動控制場景的實測對比
我們曾為一家自動化設備制造商部署了以下兩套方案進行對比:
| 項目 | EtherCAT方案 | CANopen方案 |
| 控制器 | 華頡嵌入式平臺 | 華頡嵌入式平臺 |
| 控制周期 | 平均0.6ms,波動<0.1ms | 平均12ms,波動最大達±2ms |
| 控制節點 | 24軸伺服+8個IO模塊 | 24軸伺服+8個IO模塊 |
| 穩定性 | 高速運行下未見丟包 | 偶發數據積壓,需緩沖機制 |
| 整體評價 | 高速高精,適合運動控制主力方案 | 成本可控,適合低頻率更新場景 |
七、EtherCAT和CANopen誰更適合你?
●如果你在搞的是機器人、運動控制、精密同步系統,那不用猶豫,EtherCAT是首選,控制周期短、穩定性高。
●如果你的系統不追求實時性,但注重成本控制,比如環境監控、低速工位控制,CANopen依然是一把好用的老兵。
未來的工業通信趨勢顯然正向EtherCAT等高速協議傾斜,但CANopen因其開放性和生態成熟,在特定場景下也有一席之地。
相關問答FAQs
Q1:CANopen能不能優化到5ms以下的控制周期?
A:理論上極其困難。CANopen受限于總線帶寬和仲裁機制,控制周期一般在10ms以上。除非節點極少、數據量很小、且總線純凈,才可能偶爾達到5ms,但不穩定。
Q2:EtherCAT控制周期最低能做到多少?
A:在合理配置硬件、控制器負載不高的前提下,EtherCAT最低可達250μs控制周期,但實際應用中以0.5ms~1ms較為常見,兼顧穩定性和性能。
Q3:使用EtherCAT是否會大幅提高系統成本?
A:硬件成本略高,但考慮到控制性能和生產效率的提升,長期來看性價比反而更高。而且現在市場上有很多國產EtherCAT從站模塊,成本已經下降不少。
如果你正在考慮下一代控制系統的通信架構,建議根據應用需求、預算、技術能力來綜合權衡。歡迎留言或聯系我們獲取定制方案!
-
運動控制
+關注
關注
5文章
829瀏覽量
34613 -
CANopen
+關注
關注
8文章
493瀏覽量
49509 -
工業自動化
+關注
關注
17文章
3185瀏覽量
70003 -
工控系統
+關注
關注
1文章
102瀏覽量
15145 -
ethercat
+關注
關注
20文章
1525瀏覽量
45594
發布評論請先 登錄
基于先楫6E80的ethercat從站,AL Status Code報001B的錯誤
周期抖動2μs!RK3576的IgH EtherCAT工業級主站方案很厲害
DR1M90 開源 IgH EtherCAT 主站案例:伺服電機正反轉實時控制方案
電能質量在線監測裝置數據推送頻率手動調整的精度是多少?
創龍 瑞芯微 RK3588 國產2.4GHz八核 工業開發板—IgH?EtherCAT主站開發案例(下)
創龍 瑞芯微 RK3588 國產2.4GHz八核 工業開發板—IgH?EtherCAT主站開發案例(上)
儲能BMS通信“卡殼”?CAN轉EtherCAT讓電池數據“跑起來”
CAN轉EtherCAT:化工行業高效通信的“破局者”
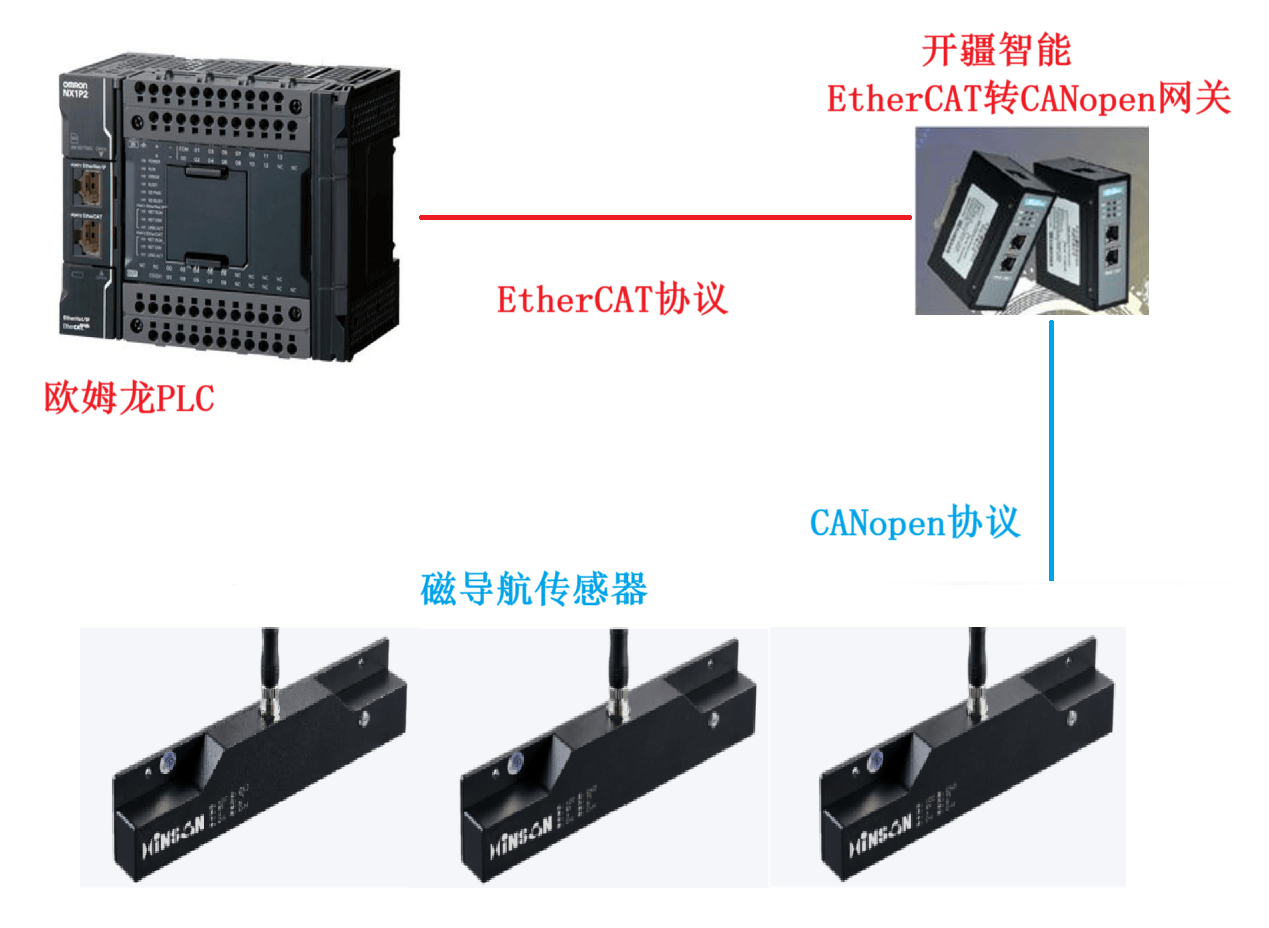
開疆智能EtherCAT轉CANopen網關連接磁導航傳感器配置案例
打破協議壁壘,CAN轉EtherCAT連接工業相機秒變跨國CP”!
讓電磁閥“聽懂”EtherCAT:耐達訊CAN轉EtherCAT網關
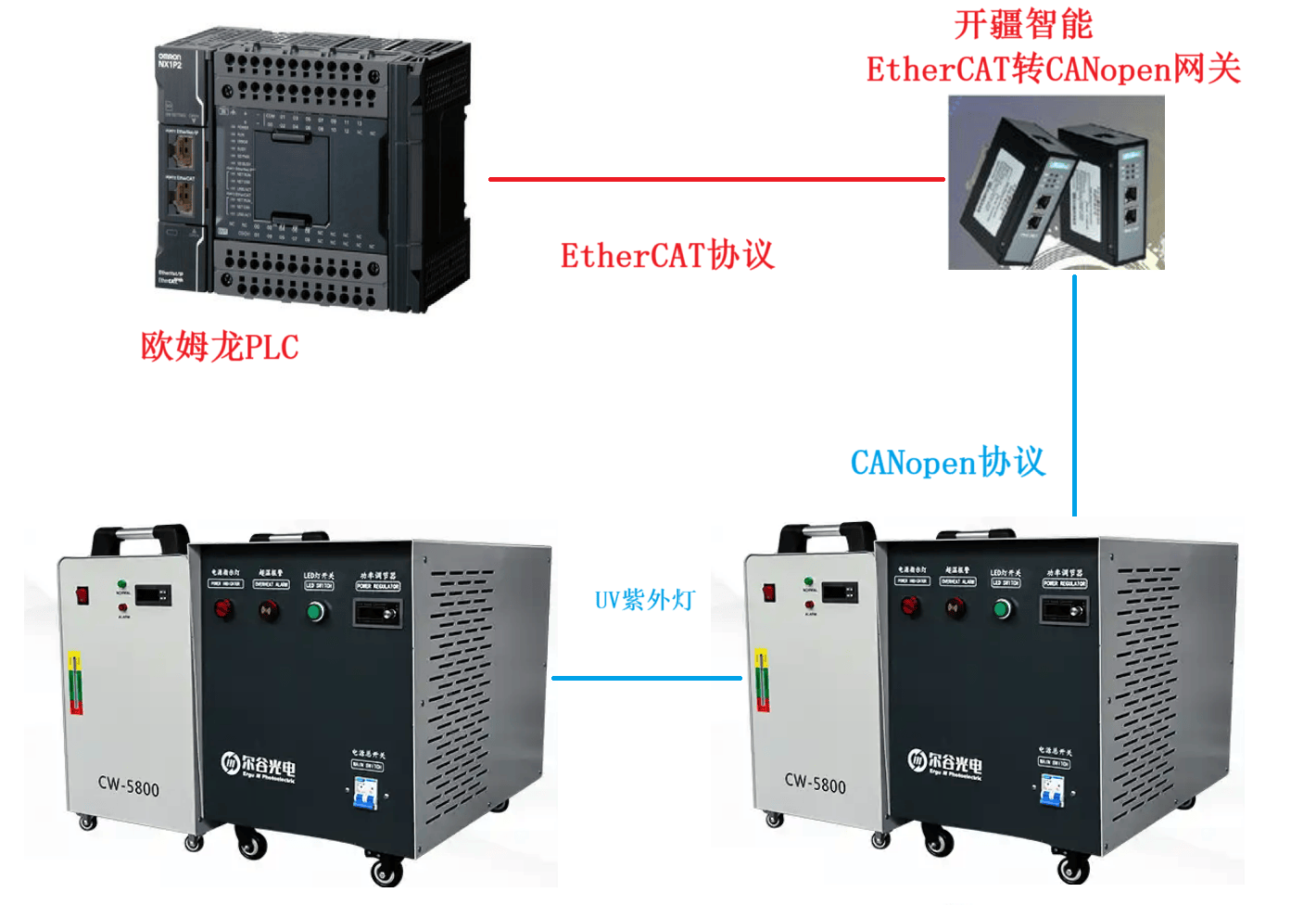
開疆智能EtherCAT轉CANopen網關連接UV燈配置案例
協議大和解:ETHERCAT轉CANopen網關配置




 工商網監
工商網監
評論