 從 “人工苦力”到 “智能戰神”,請看番茄采摘的進化史
從 “人工苦力”到 “智能戰神”,請看番茄采摘的進化史

以前摘番茄全靠人工,累人還費錢,年輕人都不愛干這活兒。現在農業界直接放大招 —— 番茄采摘機器人橫空出世!
這機器人超牛,分采摘和底盤兩部分。采摘系統有 “神器三件套”:機械臂像八爪魚,靈活抓番茄;末端手比老果農還溫柔;視覺平臺自帶 “火眼金睛”,番茄藏哪都能秒定位。
底盤更是 “走位大師”,四個輪子想咋動就咋動。窄壟、地滑都不怕,各種模式切換自如,還有算法 “導航”,穩穩不跑偏。
倆系統聯手,自動摘果又快又準,零失誤!以后番茄碰上它,只能 “束手就擒”!——摘不到番茄說番茄酸團隊
第 1 章 系統概述及作品難點與創新點
1.1 研究背景
果蔬是人們生活必需品,中國果蔬種植面積和產量全球領先。番茄營養豐富,是重要經濟作物,我國種植面積和產量持續增長,2022 年種植面積超 116 萬公頃,產量近 7000 萬噸,占世界總產量 1/3 以上。
但番茄簇狀生長、相互觸碰,采摘基本靠人工,機械化水平低。采摘人工成本占總成本 50%-70%,勞動力短缺讓成本不斷攀升,且工人多為中老年,體力負擔重。我國設施農業發達,設施番茄種植便于管理、提供穩定環境,契合機器人作業。國家大力推進農業機械化,研發番茄采摘機器人對減輕勞動強度、提升生產水平意義重大。
1.2 作品難點及創新點
1.2.1 難點
- 溫室環境復雜、空間狹小,設計通過性好的機器人底盤難度大。
- 現有采摘機器人機械臂貴且不適用于農業場景,成本和適配性是問題。
- 番茄生長密集易遮擋,規劃合理采摘順序和路徑存在挑戰。
- 番茄生長范圍廣,設計能全覆蓋的輕型機械臂難度高。
1.2.2 創新點
- 底盤采用四輪獨轉獨驅結構,動力強、轉彎靈活,適應復雜地形。
- 伸縮式機械臂覆蓋范圍廣,三級結構拓展作業空間,自主研發降本筑壁壘。
- 創新卷積神經網絡模型與仿生采摘策略,實現高效無損采摘。
- 模塊化輪組便于維護升級,整套技術自主研發,提升產品競爭力。
第 2 章 方案設計與論證
2.1 四轉四驅移動底盤和自主導航控制技術方案
2.1.1 移動底盤方案
方案一:前輪轉向 + 后輪驅動,阿克曼轉向結構,穩定性好但轉彎半徑大。
方案二:四輪獨立驅動 + 轉向,雙電機控制,結構簡單、轉彎靈活。
溫室壟窄、地形復雜,方案二更適配,故采用此方案。
2.1.2 自主導航方案
方案一:慣性導航,依賴加速度計和陀螺儀,存在誤差累積問題。
方案二:視覺導航,通過相機采集環境,用目標檢測算法定位,成本低、適應性強。
方案三:激光雷達導航,高精度但價格高、功耗大。
綜合考慮成本與環境適配性,選擇視覺導航方案二。
2.2 番茄視覺識別與定位方案
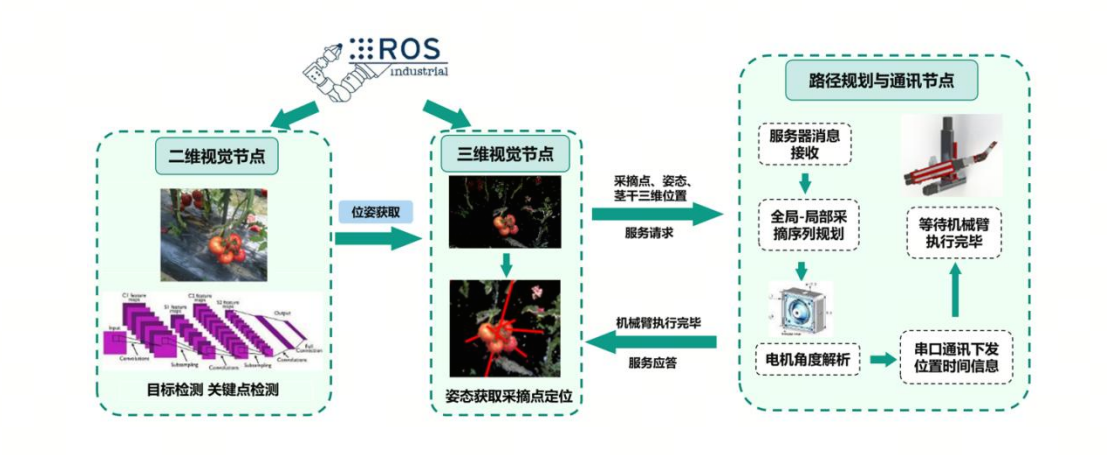
方案一:RGB-D 相機 + 卷積神經網絡 + 點云處理,檢測定位精準。
方案二:RGB-D 相機 + 卷積神經網絡,僅識別無位姿檢測。
方案三:RGB-D 相機 + 傳統圖像處理,難應對復雜遮擋。
設施番茄枝葉遮擋多,方案一兼顧速度與精度,被選用。
2.3 機械臂與末端手方案
2.3.1 機械臂方案
方案一:多自由度協作機械臂,控制復雜、逆解難。
方案二:四自由度兩軸伸縮機械臂,工作空間大、成本低、控制簡便。
考慮種植環境與成本,選擇方案二。
2.3.2 末端手方案
方案一:繩驅式扭轉末端手,多舵機控制,抓取靈活。
方案二:剪切一體式末端手,難切斷短果梗,影響保鮮。
方案三:氣吸式末端手,吸力不足,采摘成功率低。
因番茄果梗短、大小不均,采用方案一。
2.4 系統集成
2.4.1 底盤系統
由輪組、電池組、控制系統構成。輪組模塊化設計,電池居中供電,預留安裝孔便于升級。
2.4.2 采摘系統
含三級伸縮機械臂、3 自由度末端手、旋轉升降平臺及控制系統。機械臂采用繩排式伸縮,結構輕巧,底部連接板實現與底盤快速連接。
第 3 章 原理分析與硬件電路圖
采摘機器人分為移動底盤和機械臂兩大控制系統,通過模塊化設計,包含單片機與底盤控制、上位機與機械臂控制、視覺、通信、語音、電源等模塊,各模塊分工協作。
3.1 單片機與底盤運動控制模塊
選用 Arduino mega2560 核心板作為底盤控制器,它具備 54 路數字、16 路模擬 I/O 口,4 路 UART 接口及 I2C 接口,能滿足多模塊信號處理需求,支持 OLED 屏實時監控狀態。核心板參數:3.3V/50mA 供電,256KB Flash、8KB SRAM、4KB EEPROM,16MHz 工作時鐘。
3.2 上位機與機械臂運動控制模塊
上位機采用基于 Ubuntu 系統的高性能電腦,作為機械臂控制核心,負責算法處理、數據存儲與交互。通過 RS485 串口的 Modbus 協議與下位機通信。電腦雙系統協同工作:Windows 系統調試電機與夾爪,Ubuntu 系統借助 MoveIt! 在 Rviz 和 Gazebo 環境中仿真并控制機械臂運動。
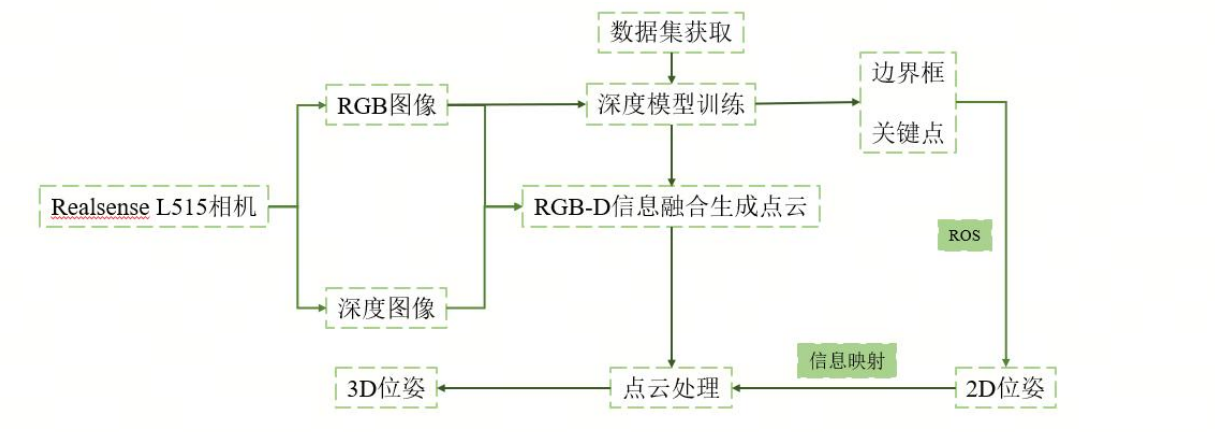
3.3 Realsense L515 相機
選用英特爾 Realsense L515 深度相機,集成 RGB 與深度傳感器,通過 USB 3.1 連接主機,基于 ToF 技術獲取彩色與深度圖像。其 70x55 視野、低功耗且兼容多系統,體積小、重量輕,固定于機械臂上,為番茄識別定位提供視覺數據。
3.4 通信模塊
通信系統整合 485、藍牙、SBUS、TCP 指令。電機控制上,底盤 8 個電機與機械臂 4 個伺服電機采用 485 通信,手抓舵機通過 485 轉 PWM 模塊適配。底盤支持雙模式控制:遙控器模式下,SBUS 接收機轉換信號驅動底盤;上位機模式中,藍牙模塊或 ESP32 開發板傳輸導航指令。此外,定制拓展板實現核心板信號擴展與固定。
3.5 語音識別模塊
引入 ASR-PRO 離線語音芯片,降低操作門檻,農民通過喚醒詞和指令即可操控底盤,無需專業培訓,兼顧易用性與成本。
3.6 電源模塊
電源模塊采用雙電壓供電:控制通訊系統 24V、驅動系統 48V,經優化電源轉換效率、降噪抗干擾,保障硬件穩定運行。
第 4 章 軟件設計與流程
4.1 視覺導航參數信息獲取
機器人壟間自主導航的核心是精準獲取導航線,采用基于直線模型的視覺導航算法,通過 “圖像采集 - 處理 - 導航線提取” 三步實現。
4.1.1 圖像采集
為應對農業環境光照變化與底盤抖動,調整 RealSense L515 相機參數:調節焦距保證清晰成像,調大光圈縮短曝光時間,確保圖像質量。
4.1.2 圖像處理
運用 Otsu 算法結合 Canny 邊緣檢測進行壟間輪廓檢測。Otsu 算法自動選取閾值實現圖像二值化,Canny 算法檢測邊緣,二者結合解決傳統邊緣檢測的閾值問題,適應不同光照條件。
4.1.3 獲取并跟蹤導航線
通過行掃描點檢測算法獲取壟體邊界離散點,經多項式擬合得到道路中心離散點,將相機坐標轉換為世界坐標,提取橫向與角度偏差參數,由上位機傳輸至主控板,驅動機器人沿導航線行進。
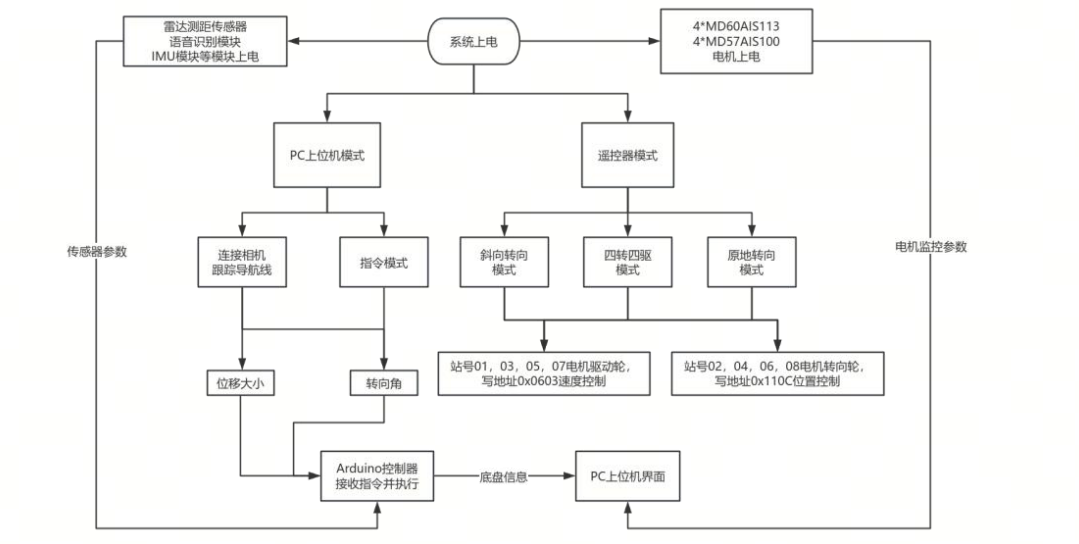
4.2 四轉四驅底盤控制系統
底盤通過 MODBUS 協議控制 8 個電機實現運動,轉向電機采用位置控制確保角度精準,驅動電機用速度控制結合模糊 PID 算法減小誤差。設計斜向轉向、四轉四驅阿克曼、原地轉向三種模式:斜向轉向提升橫向穩定性;四轉四驅適配窄壟;原地轉向利用 360 度輪組實現。
支持遙控器與上位機雙控制模式:遙控器通過云卓 H12 撥桿切換模式;上位機基于 QT 開發,可跨平臺運行,實現電腦或手機操控。針對四轉四驅模式,以底盤速度與角度誤差為輸入,經模糊 PID 動態調整參數,通過轉角逆運動學模型控制輪組,保障精準走位。
-
機器人
+關注
關注
213文章
31073瀏覽量
222188 -
人工智能
+關注
關注
1817文章
50094瀏覽量
265298
發布評論請先 登錄

清越光電:從“中國屏”到“世界芯”的進化之路
揭秘汽車鑰匙的信息安全密碼

綜合配電柜的“進化史”——從機械開關到智能終端
從燃油泵到電動航空:高速電機控制器的技術革命

從收音機到新能源:鋁電解電容如何跟著電子設備 “進化” 了半個世紀?

工業電腦的進化從基礎控制到智能決策的跨越
從“聽得見”到“聽得懂”:語音識別芯片的AI進化

當工業設備開始“思考”:HZ-RK3576-SP_EVM如何讓傳統工業行業煥發智能新生?
聚徽智控——從嵌入式到邊緣計算:平板工控電腦的技術進化論

德州儀器新一代音頻處理器塑車載信息娛樂系統
老文章新視角:從靜態測試到CI/CT生態的進化



 工商網監
工商網監
評論