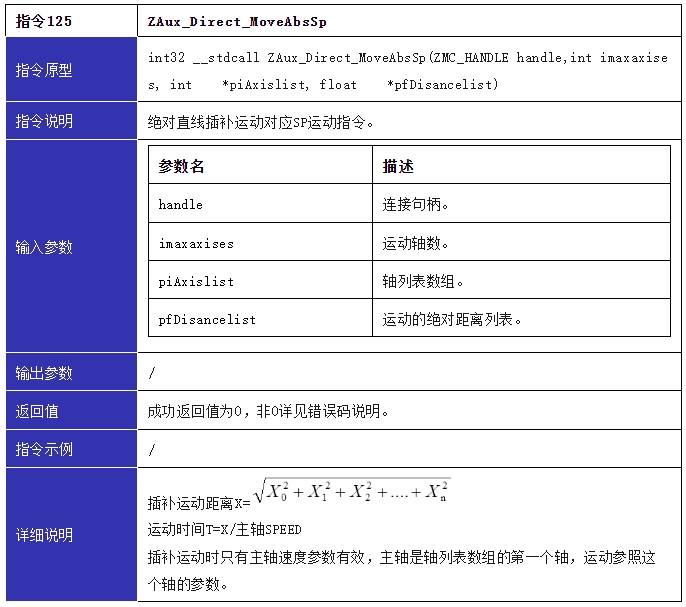
") PCIe EtherCAT實時運動控制卡PCIE464的CAD導(dǎo)圖與刀向跟隨應(yīng)用
PCIe EtherCAT實時運動控制卡PCIE464的CAD導(dǎo)圖與刀向跟隨應(yīng)用

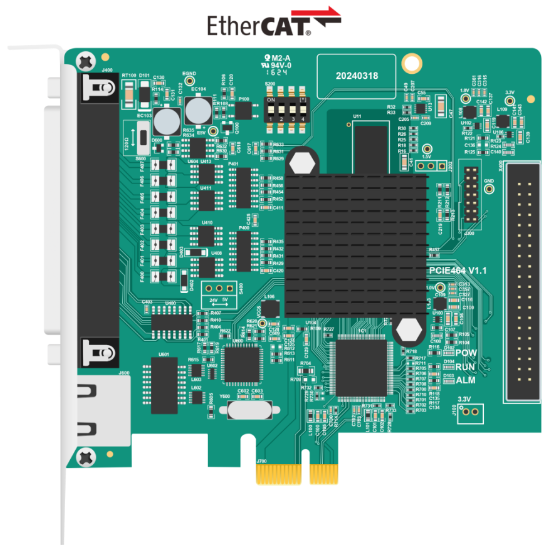
一.硬件介紹
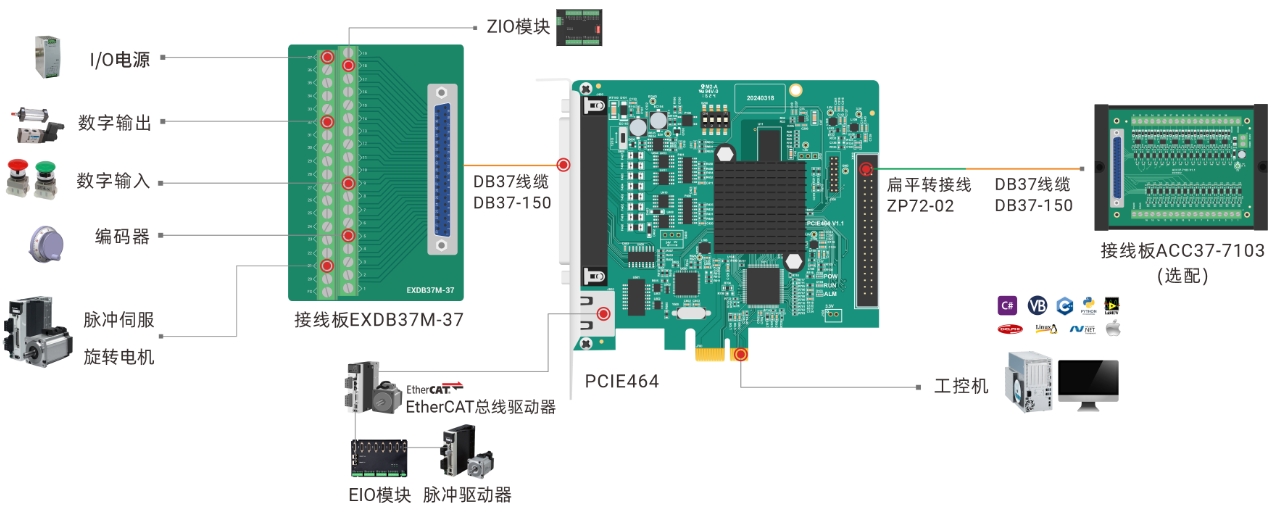
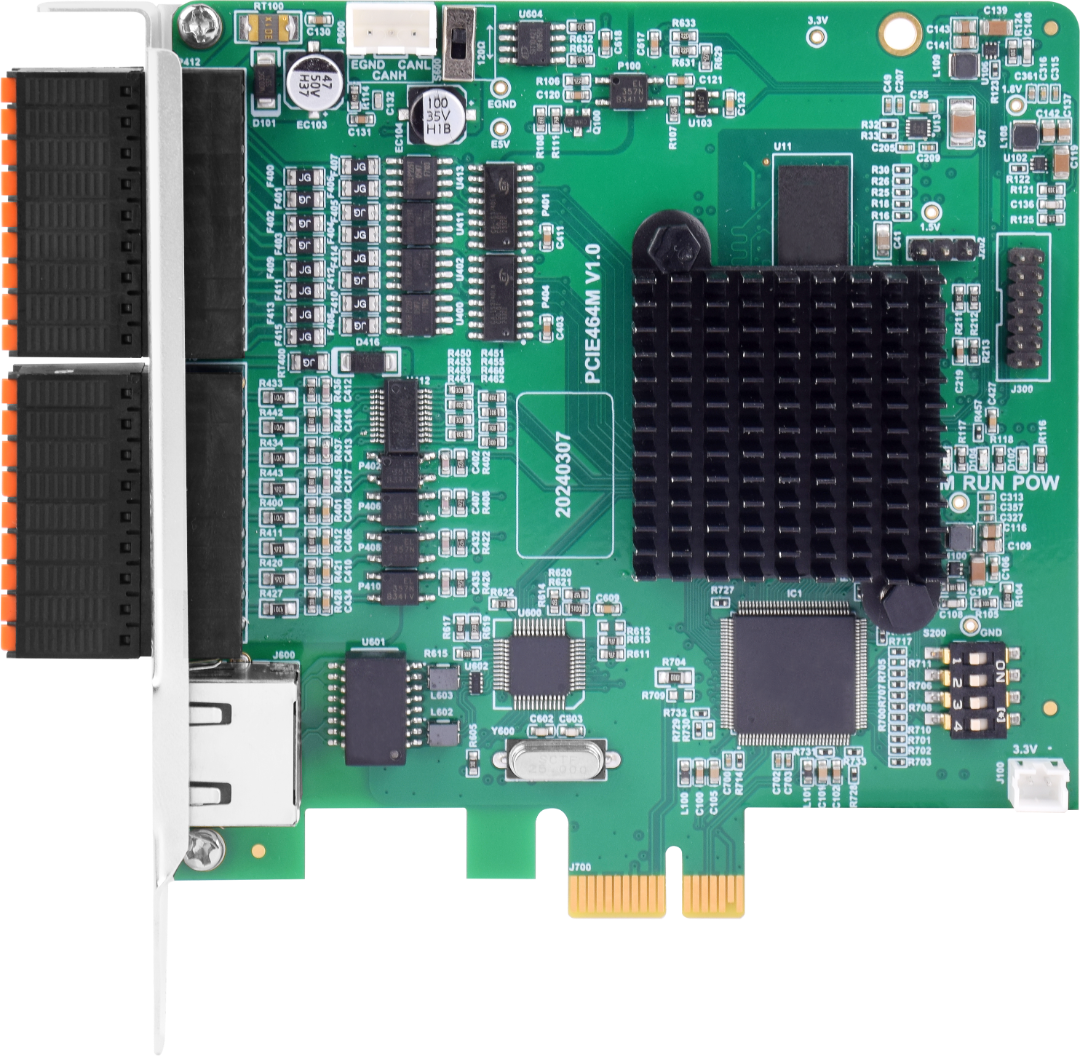
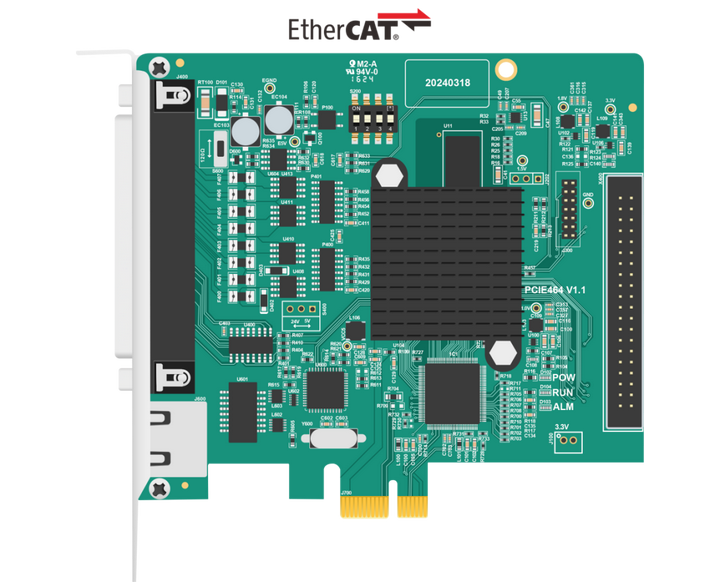
PCIE464運動控制卡是正運動推出的一款EtherCAT總線+脈沖型、PCIE接口式的運動控制卡,可選6-64軸運動控制,支持多路高速數(shù)字輸入輸出,可輕松實現(xiàn)多軸同步控制和高速數(shù)據(jù)傳輸。
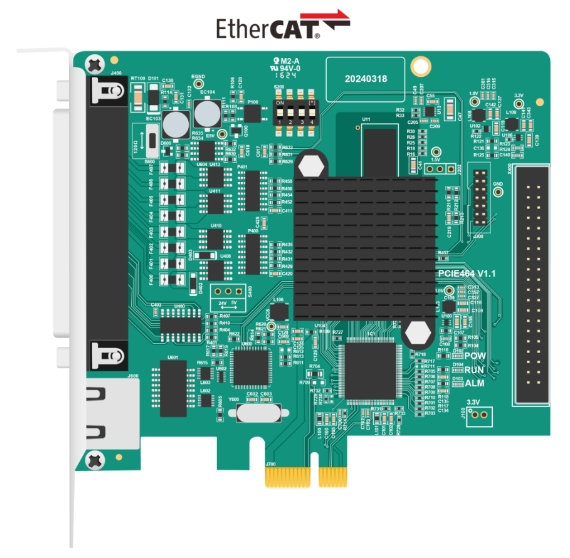
PCIE464運動控制卡適合于多軸點位運動、插補運動、軌跡規(guī)劃、手輪控制、編碼器位置檢測、IO控制、位置鎖存等功能的應(yīng)用。PCIE464運動控制卡適用于3C電子加工、檢測設(shè)備、半導(dǎo)體設(shè)備、SMT加工、激光加工、光通訊設(shè)備、鋰電及光伏設(shè)備、以及非標(biāo)自動化設(shè)備等高速高精應(yīng)用場合。
PCIE4系列控制卡的應(yīng)用程序可以使用VC,VB,VS,C++,C#等軟件開發(fā),程序運行時需要動態(tài)庫zmotion.dll,調(diào)試時可以將RTSys軟件同時連接控制器,從而方便調(diào)試、方便觀察。

PCIE464產(chǎn)品視頻介紹可點擊→“【EtherCAT同步周期快至100us】超高實時性PCIe EtherCAT控制卡PCIE464”查看。
更多關(guān)于PCIE464的詳情介紹,點擊“PCIE464 — 高速高精,超高實時性的PCIe EtherCAT實時運動控制卡”查看。
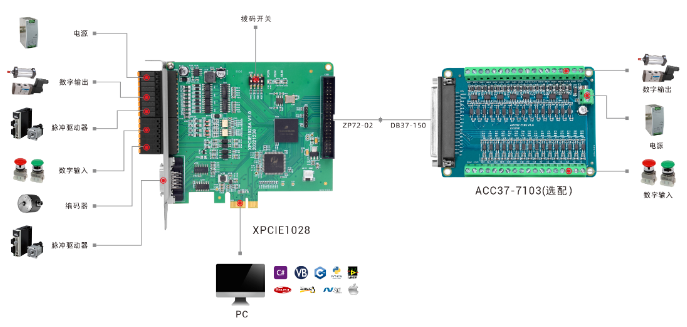
二.接線參考
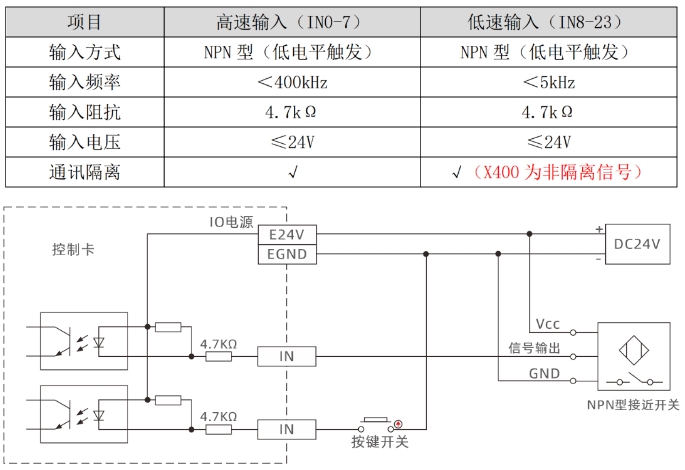
1.IN數(shù)字量輸入接口
數(shù)字輸入分布在J400(IN0-IN7)和X400(IN8-IN39)信號接口中。
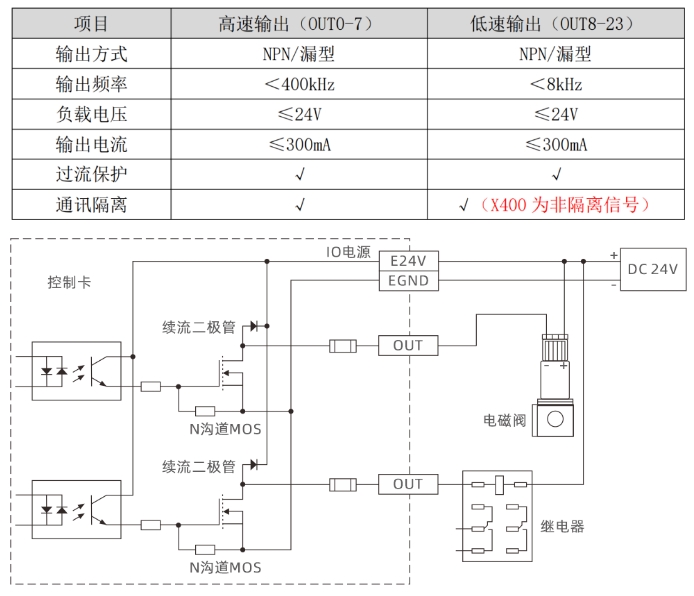
2.OUT數(shù)字量輸出接口
數(shù)字輸出分布在J400(OUT0-7)和X400(OUT8-OUT39)信號接口中。
3.單端編碼器及單端脈沖接線
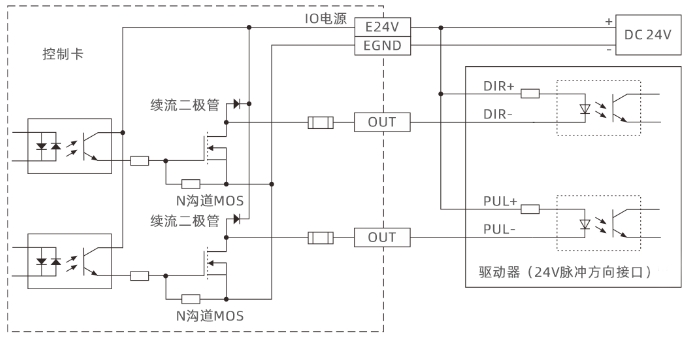
單端脈沖接線圖
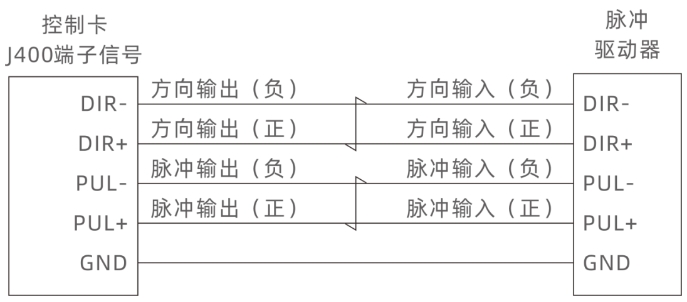
差分脈沖接線圖
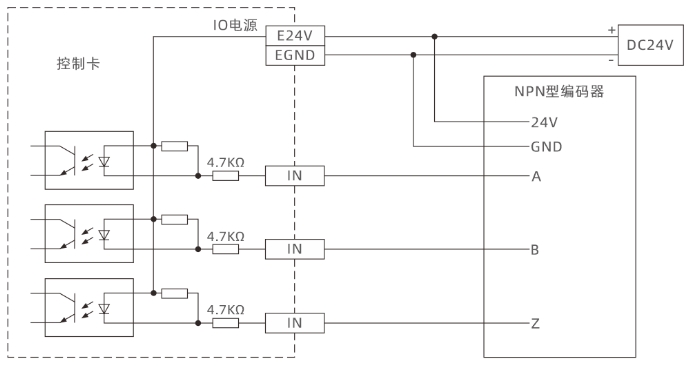
單端編碼器接線圖
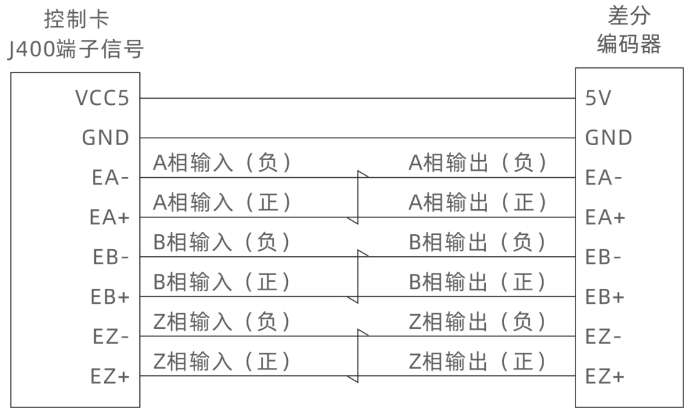
差分編碼器接線圖
注:PCIE464的J400接口中有一個差分脈沖軸接口和三個單端脈沖軸接口,兩個差分編碼器接口(其中一個與差分脈沖軸接口復(fù)用,取決于固件設(shè)定)和兩個單端編碼器接口,具體引腳定義參見PCIE464硬件手冊。
三.CAD解析及刀向跟隨計算技巧解釋
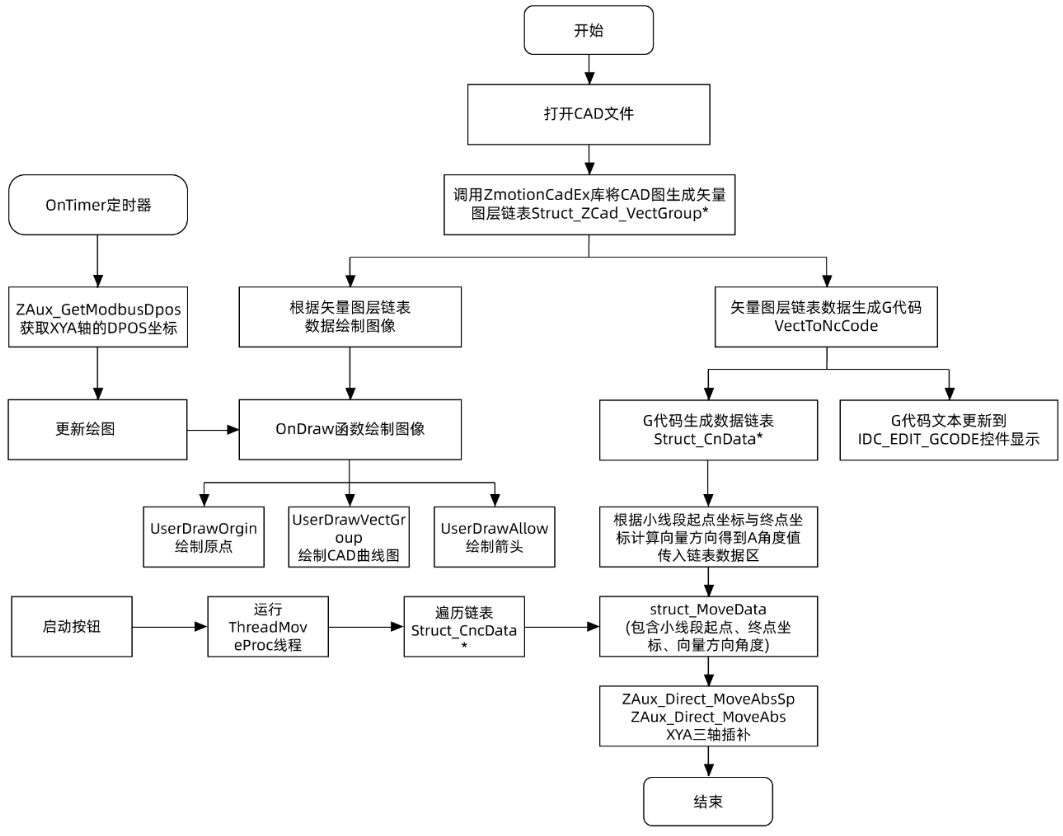
1.CAD圖紙解析
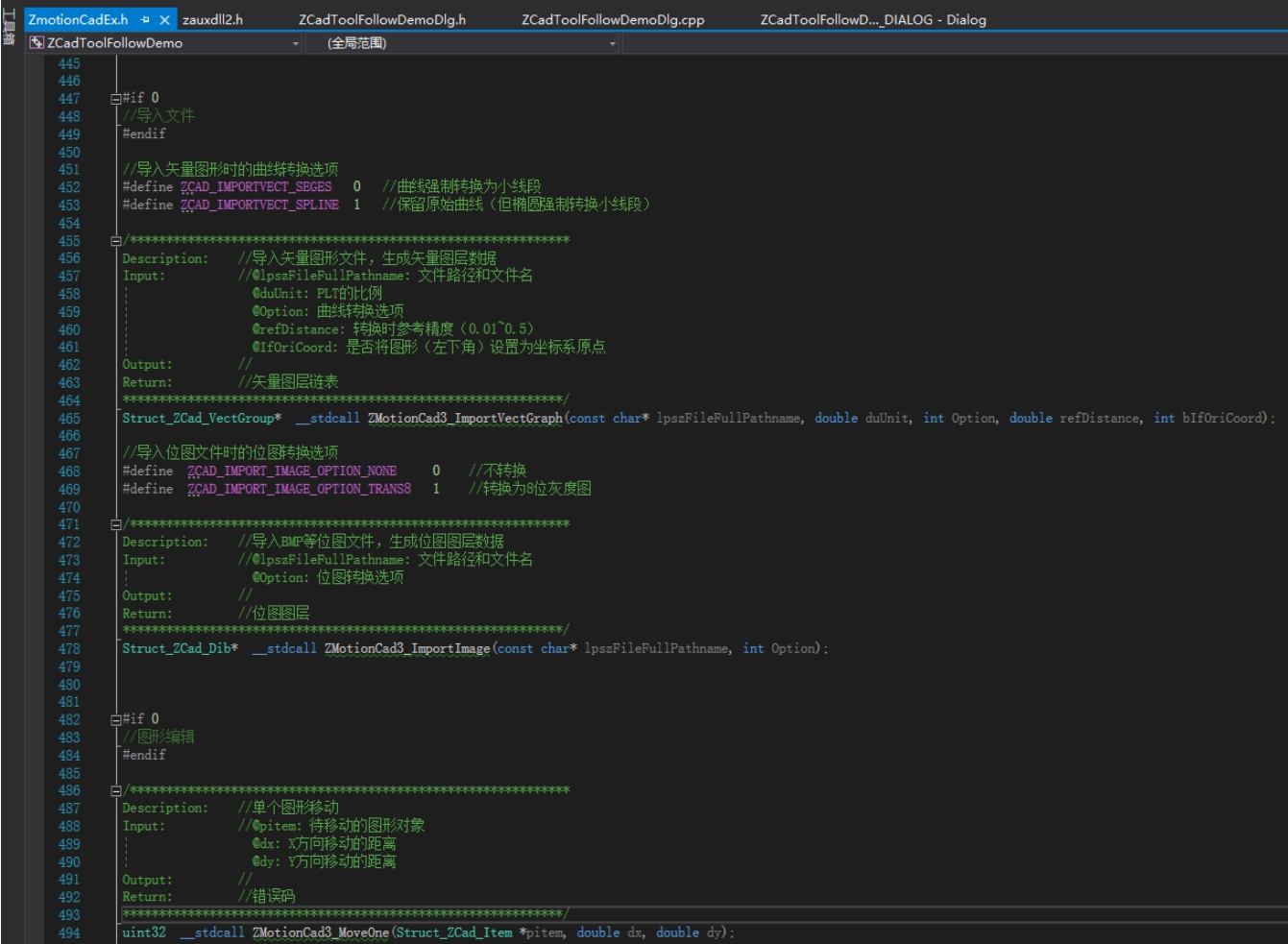
正運動技術(shù)提供開放的ZmotionCadEx庫,可導(dǎo)入DXF、Ai、Plt、Dst圖紙,可以生成運動坐標(biāo)數(shù)據(jù)轉(zhuǎn)G代碼、zbasic運動指令、或直接PC函數(shù)執(zhí)行運動。
2.刀向跟隨計算
刀向跟隨,是在插補運動的過程中,使非插補軸隨著插補運動的合成位移的變化而變化,從而實現(xiàn)在加工過程中,刀具始終處于合適的加工方向和位置的工藝。
非插補軸(如旋轉(zhuǎn)軸或獨立軸)能夠根據(jù)插補軸的合成位移實時調(diào)整,使刀具始終沿預(yù)定路徑或方向運動。例如,在砂輪磨削中,通過調(diào)整砂輪的角度,確保其與工件切向方向一致;在布料裁切中,通過調(diào)整刀具朝向,始終指向行進方向。
本例中通過計算小線段的向量方向,以3軸插補形式運行實現(xiàn),基本原理如下圖所示。
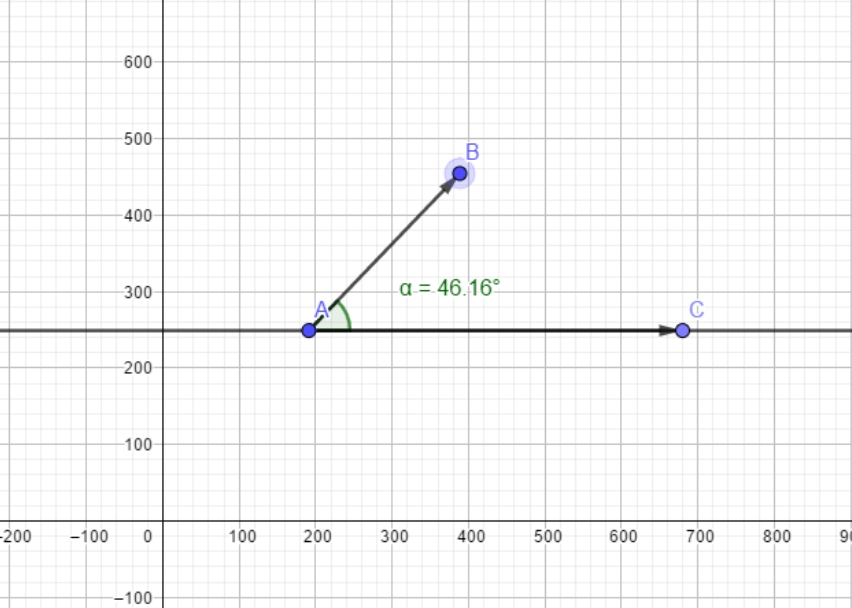
已知線段起點A坐標(biāo),終點B坐標(biāo),在起點A上做與X軸平行向量AC,通過數(shù)學(xué)計算得到向量AB與向量AC的夾角α,即線段AB與X軸正方向夾角。將夾角α與終點坐標(biāo)XY做三軸插補來作為刀向跟隨。
在某些場合需要A軸先抬刀轉(zhuǎn)到加工角度,再下刀加工:比如加工矩形輪廓四條邊,那么應(yīng)該先抬刀轉(zhuǎn)到加工方向,再下刀進行加工,不應(yīng)在工件上轉(zhuǎn)刀,此時可以通過判斷線段的長度,小于設(shè)定值時三軸插補,大于設(shè)定值時應(yīng)抬刀→轉(zhuǎn)刀→下刀再加工。
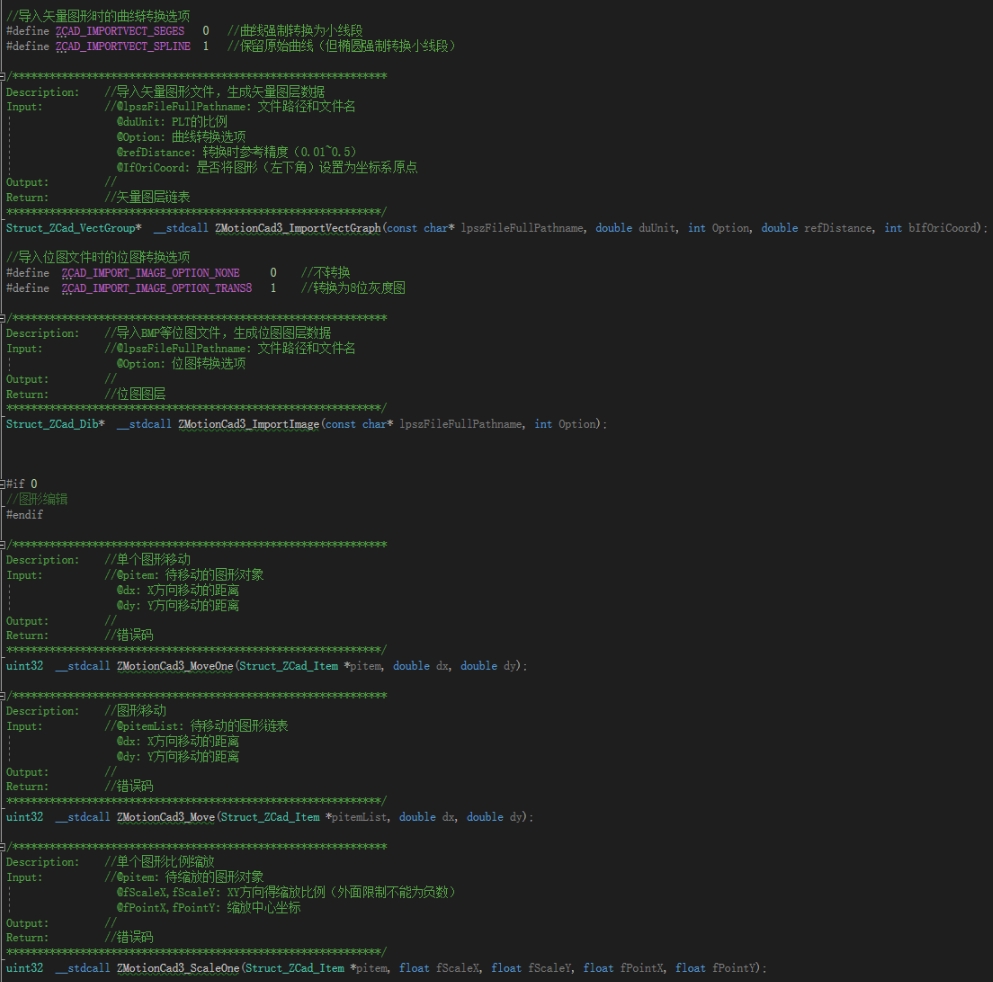
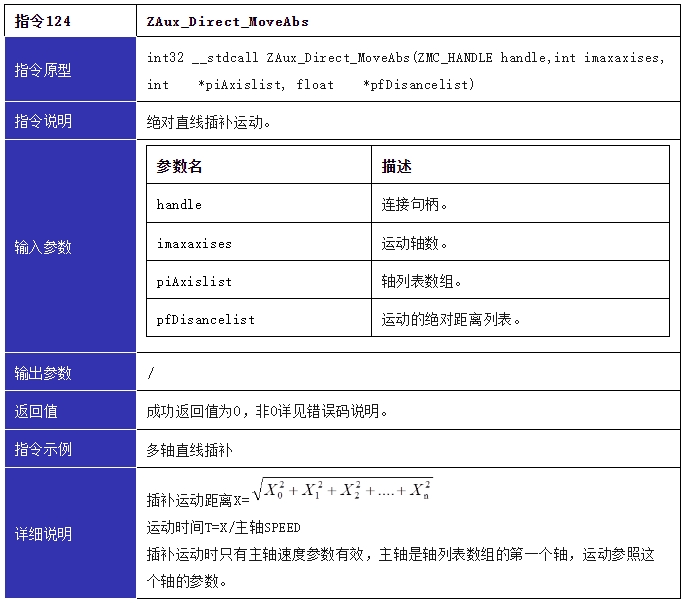
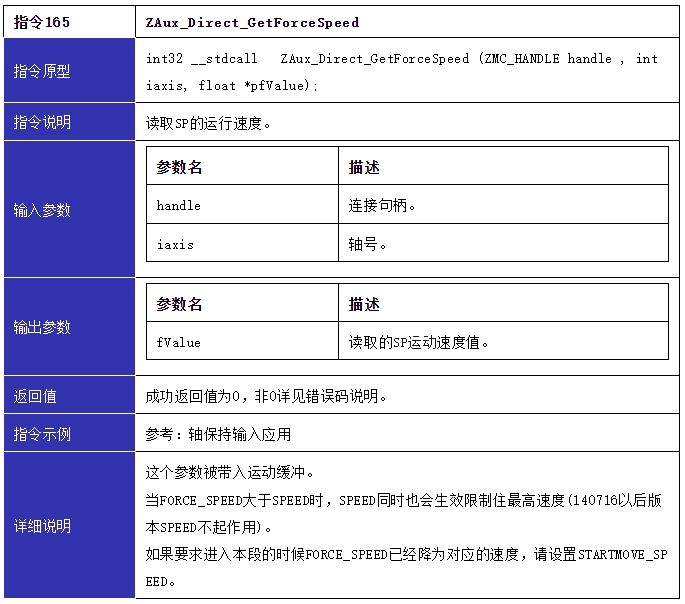
本例中主要用到了下面幾個函數(shù)接口:
四.MFC與C++編程實現(xiàn)
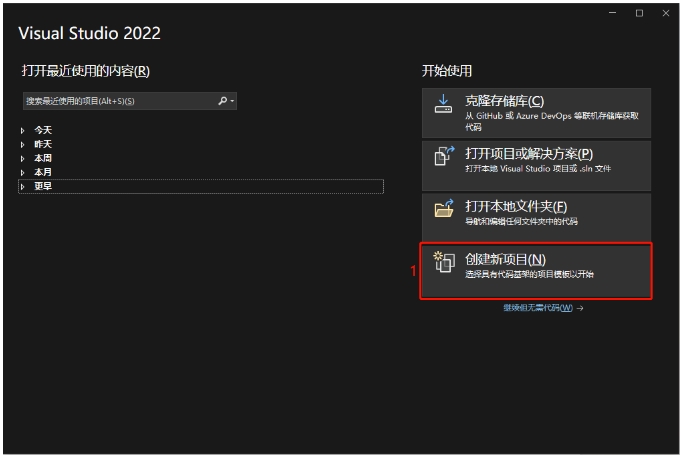
1.首先打開Visual Studio 2022,點擊創(chuàng)建新項目。
2.選擇開發(fā)語言為“Visual C++”和程序類型“MFC應(yīng)用程序”。
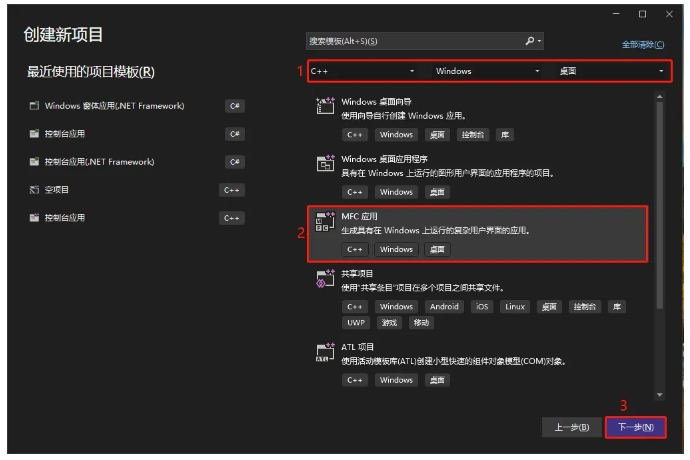
3.點擊下一步即可。
4.選擇類型為“基于對話框”,下一步或者完成。
5.前往正運動官網(wǎng)下載PC函數(shù)庫,路徑如下(本文采用64位函數(shù)庫為例)。
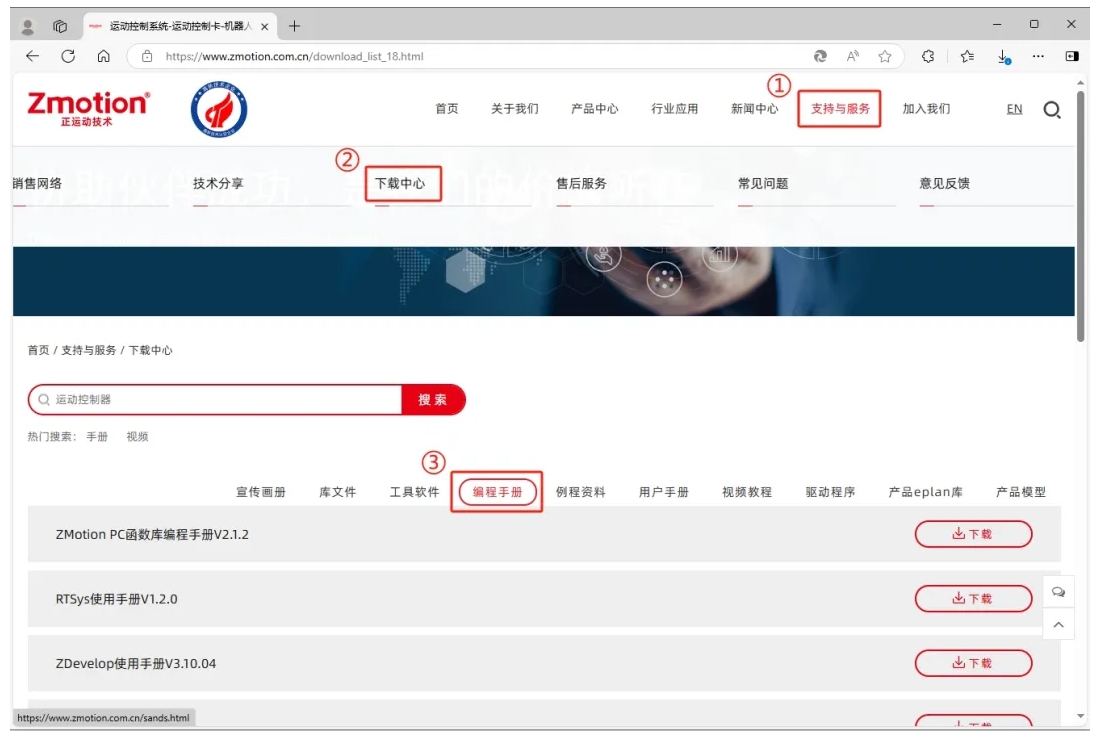
(1)進入官網(wǎng),選擇支持與服務(wù),打開下載中心選擇庫文件,就能找到所有的PC函數(shù)庫。
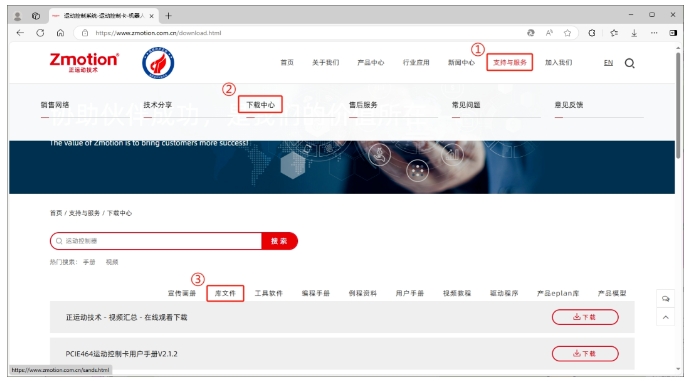
(2)點擊下載Windows C++(64位),可按需求另存為想要保存的路徑下。

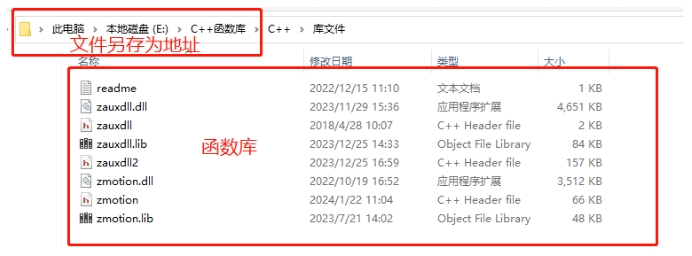
(3)函數(shù)庫另存為具體路徑如下。
(4)如需處理CAD圖,可與技術(shù)工程師聯(lián)系獲取ZmotionCadEx庫。

6.將廠商提供的C++庫文件和相關(guān)頭文件復(fù)制到新建的項目里。
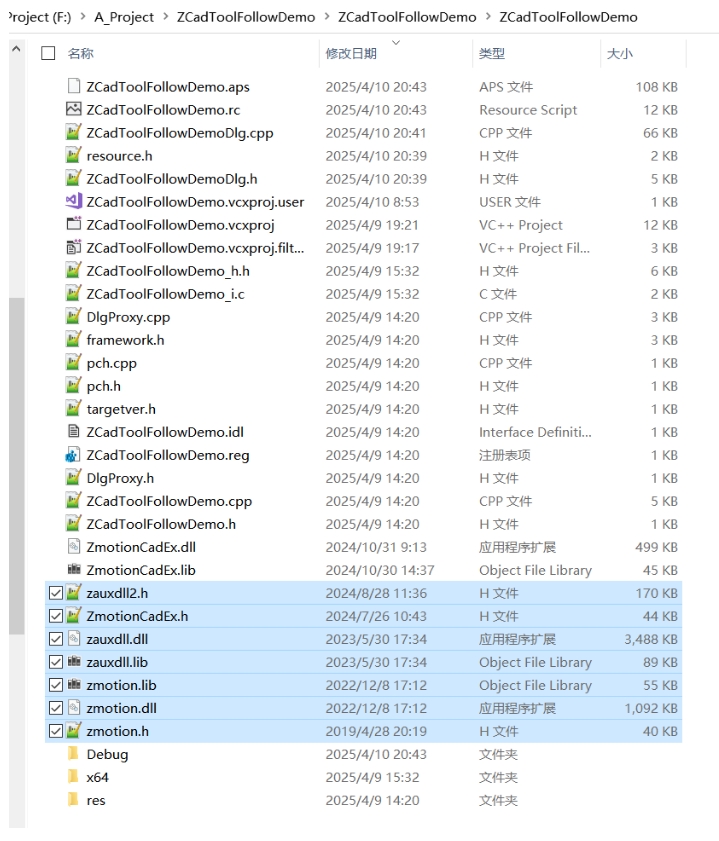
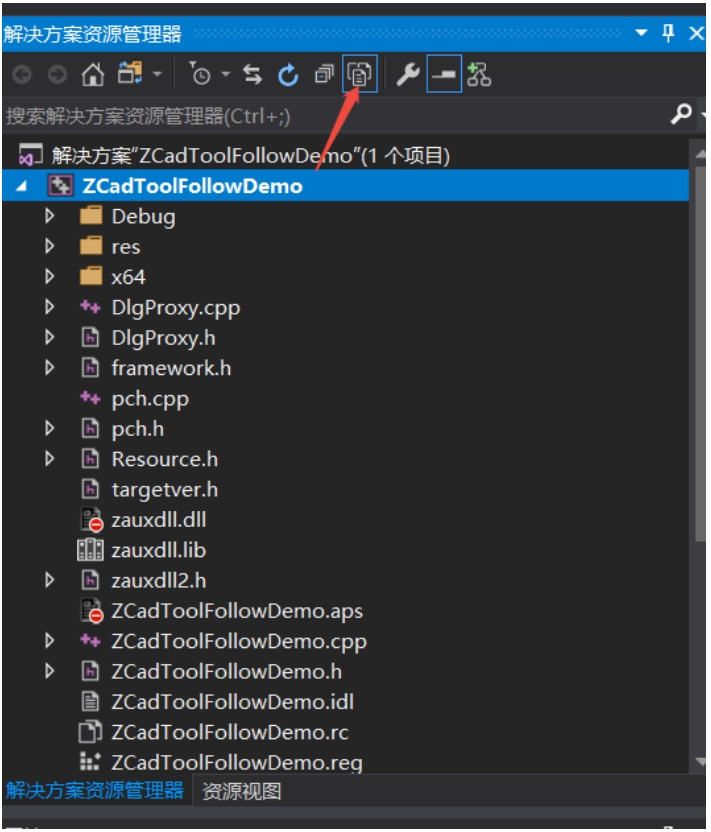
7.在項目中添加靜態(tài)庫和相關(guān)頭文件。
(1)打開解決方案資源管理器,點擊顯示全部文件。
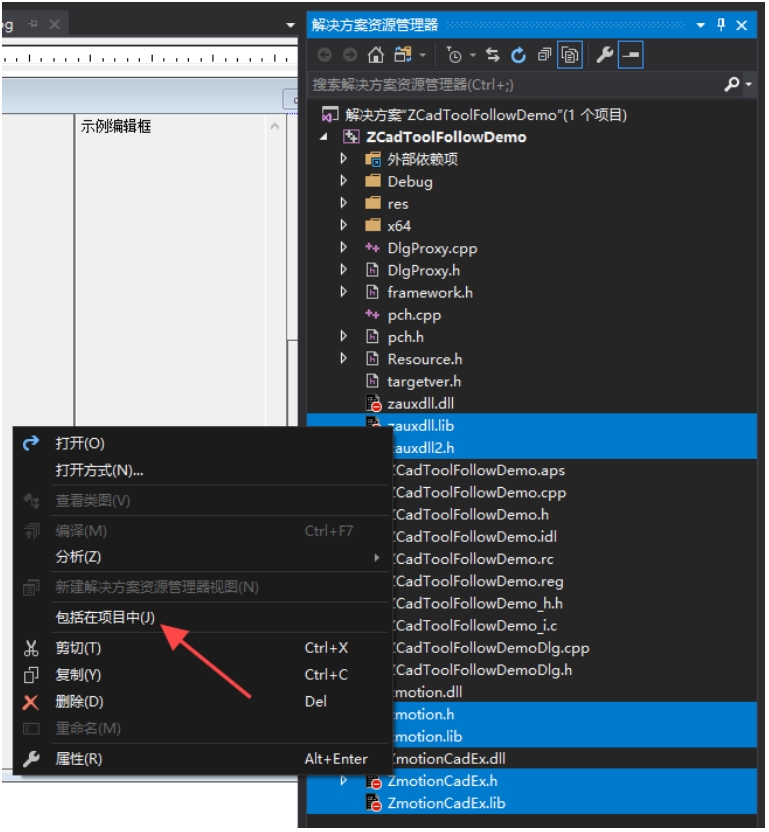
(2)選中.h與.lib文件,右鍵包括在項目中。
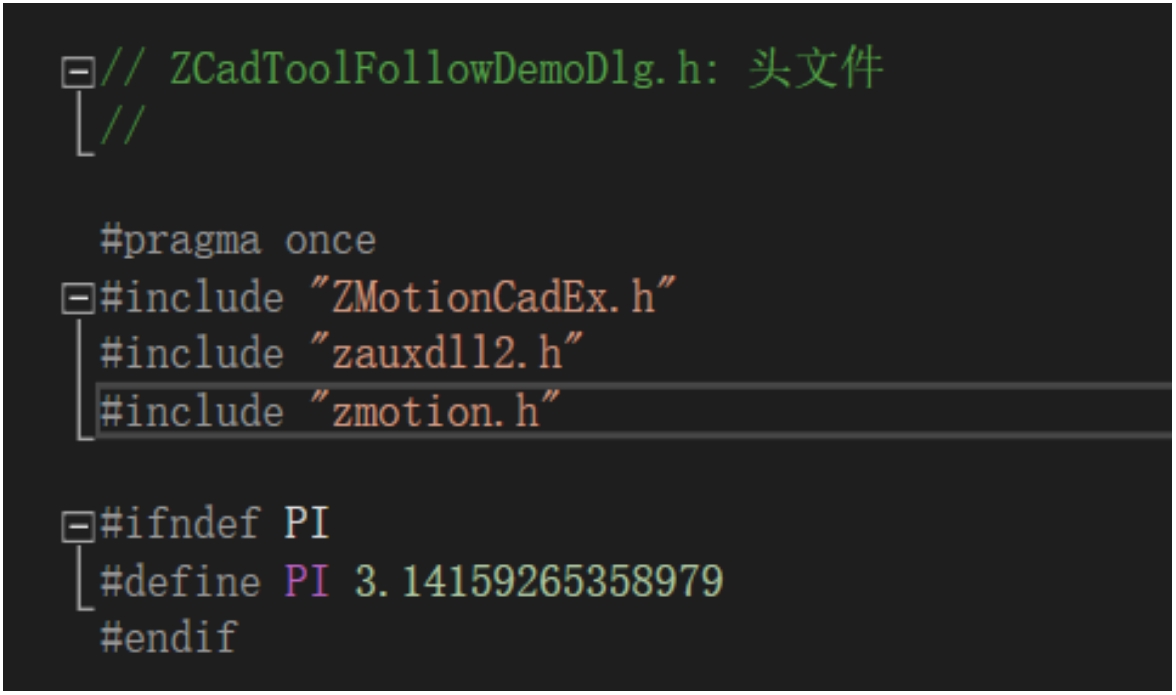
8.聲明用到的頭文件。
9.至此項目新建完成,可進行MFC項目開發(fā)。
五.查看PC函數(shù)手冊,熟悉相關(guān)函數(shù)接口
1.PC函數(shù)手冊也可以在正運動官網(wǎng)“支持與服務(wù)”→“下載中心”→“編程手冊”中找到。
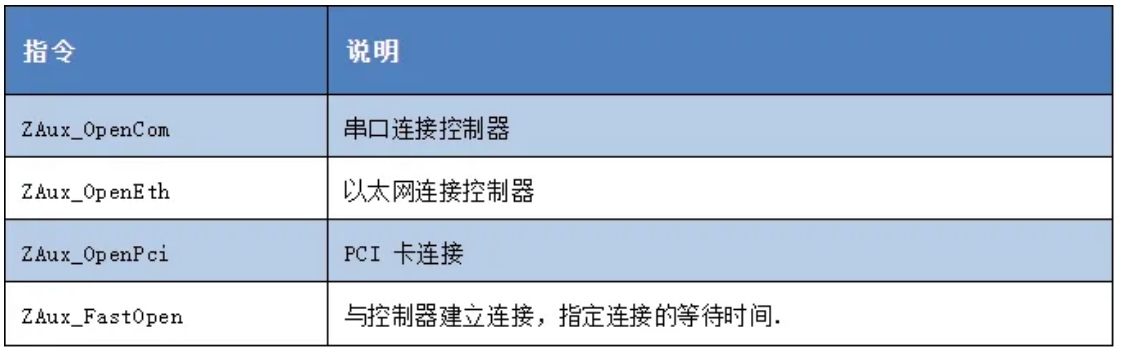
2.鏈接控制器,獲取鏈接句柄。
3.查看ZmotionCadEx.h中關(guān)于CAD圖處理的函數(shù)接口。
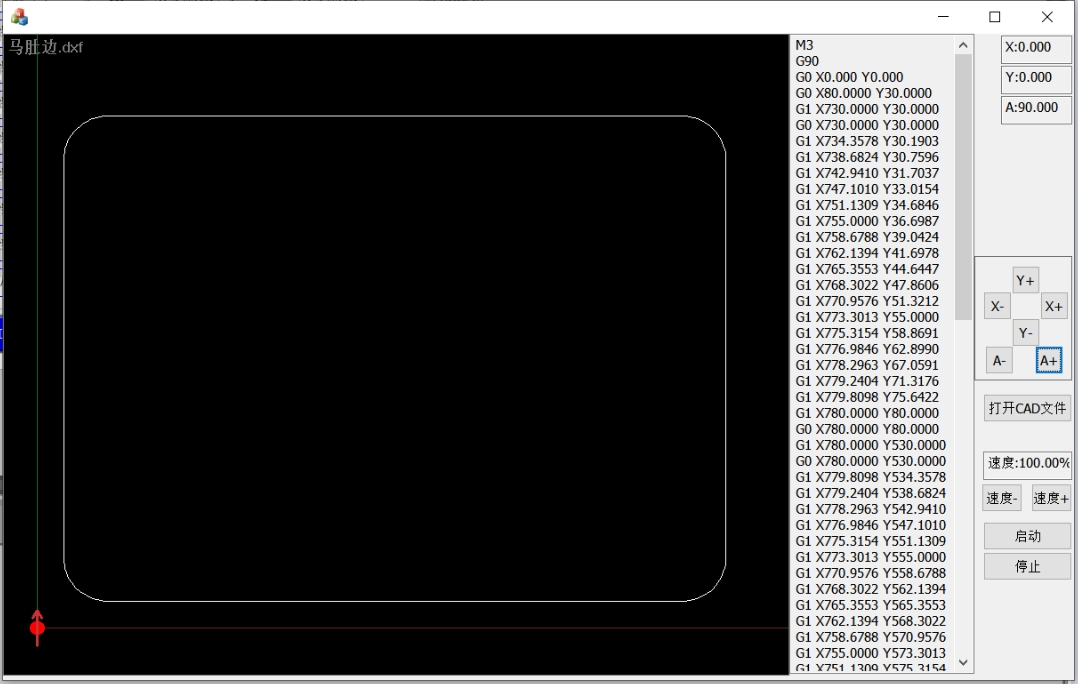
六.MFC實現(xiàn)CAD導(dǎo)入與刀向跟隨
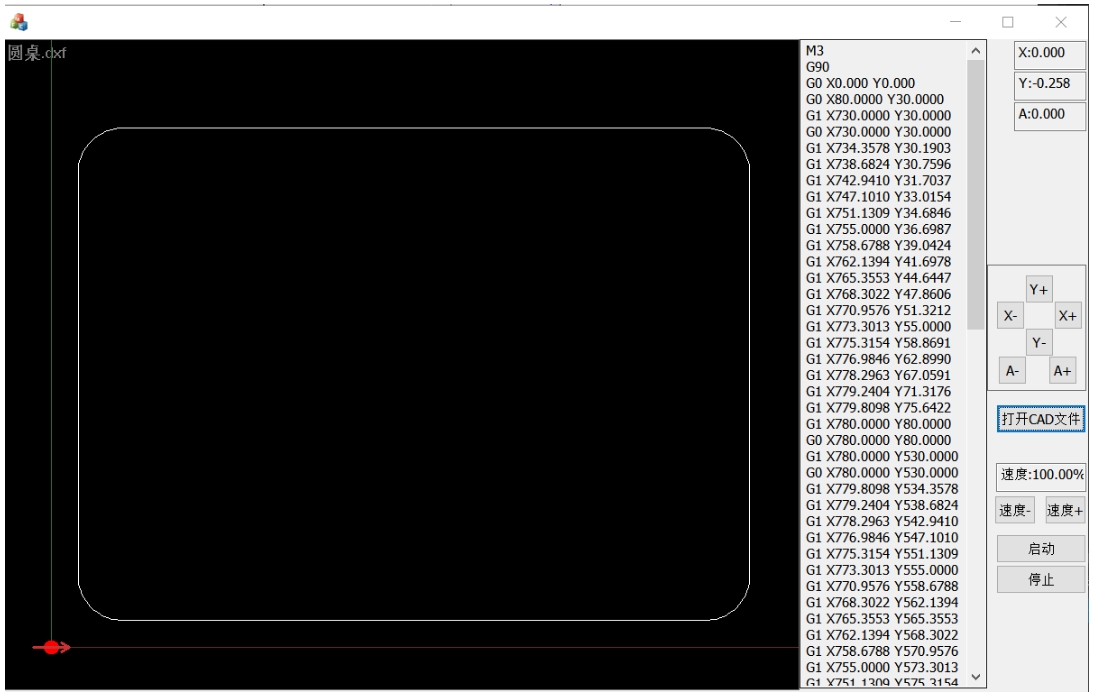
1.例程界面如下。
2.初始化連接到控制器。
BOOLCZCadToolFollowDemoDlg::OnInitDialog() { CDialogEx::OnInitDialog(); //設(shè)置此對話框的圖標(biāo)。當(dāng)應(yīng)用程序主窗口不是對話框時,框架將自動 //執(zhí)行此操作 SetIcon(m_hIcon,TRUE);//設(shè)置大圖標(biāo) SetIcon(m_hIcon,FALSE);//設(shè)置小圖標(biāo) //TODO:在此添加額外的初始化代碼 m_DlgRect.SetRect(0,0,0,0);//初始化對話框大小存儲變量 CRectrect; GetClientRect(&rect);//取客戶區(qū)大小 Old.x=rect.right-rect.left; Old.y=rect.bottom-rect.top; GetClientRect(&m_DlgRect); GetDlgItem(IDC_PIC_VIEW)->GetClientRect(m_rcView); /*--------------------控制器連接--------------------*/ charstr_ip[]="192.168.0.11"; intm_liv_ZmcMoveRe=ZMC_SearchAndOpenEth(str_ip,800,&g_handle); if(ERR_OK!=m_liv_ZmcMoveRe) { if(MessageBox((L"控制器連接失敗,是否打開仿真版運行?"),(L"溫馨提示"),MB_YESNO|MB_ICONQUESTION)==IDYES) { if(!IsProccessRunning(_T("ZSimu.exe"))) { ShellExecute(NULL,L"open",_T("\仿真器\ZSimu.exe"),NULL,NULL,SW_SHOWNORMAL); } else { HANDLEhProcessHandle; ULONGnProcessID; HWNDTheWindow; TheWindow=::FindWindow(NULL,_T("ZSimu.exe")); ::GetWindowThreadProcessId(TheWindow,&nProcessID); hProcessHandle=::OpenProcess(PROCESS_TERMINATE,FALSE,nProcessID); ::TerminateProcess(hProcessHandle,4); ShowWindow(nProcessID); } strcpy_s(str_ip,"127.0.0.1"); m_liv_ZmcMoveRe=ZAux_OpenEth(str_ip,&g_handle); if(m_liv_ZmcMoveRe!=ERR_OK) { Sleep(1000); m_liv_ZmcMoveRe=ZAux_OpenEth(str_ip,&g_handle); if(m_liv_ZmcMoveRe!=ERR_OK) { Sleep(1000); m_liv_ZmcMoveRe=ZAux_OpenEth(str_ip,&g_handle); if(m_liv_ZmcMoveRe!=ERR_OK) { Sleep(1000); m_liv_ZmcMoveRe=ZAux_OpenEth(str_ip,&g_handle); if(m_liv_ZmcMoveRe!=ERR_OK) { MessageBox(L"仿真器連接失敗(請給予仿真器權(quán)限)"); } } } } } } if(NULL!=g_handle) { SetTimer(0,1,NULL); //初始化軸參數(shù) for(inti=0;i<=3;?i++) ????????{ ????????????ZAux_Direct_SetAtype(g_handle,?i,?0);//軸類型??虛擬軸 ????????????ZAux_Direct_SetUnits(g_handle,?i,?10000);//脈沖當(dāng)量?1000?脈沖為單位 ????????????ZAux_Direct_SetSpeed(g_handle,?i,?100);//速度UNITS?/?S ????????????ZAux_Direct_SetAccel(g_handle,?i,?1000);//加速度 ????????????ZAux_Direct_SetDecel(g_handle,?i,?1000);//減速度 ????????????ZAux_Direct_SetSpeedRatio(g_handle,?i,?1);//速度比例 ????????} ????????m_strSpeedRatio.Format(L"速度:%0.2f%%",?1?*?100.0); ????????UpdateData(false); ????} ????return?TRUE;??//?除非將焦點設(shè)置到控件,否則返回?TRUE }
3.定時器獲取軸DPOS坐標(biāo)用于顯示與刷新繪制圖像。
voidCZCadToolFollowDemoDlg::OnTimer(UINT_PTRnIDEvent)
{
//TODO:在此添加消息處理程序代碼和/或調(diào)用默認值
ZAux_GetModbusDpos(g_handle,3,gfarr_ListDpos);
if(gfarr_ListDposLast[0]!=gfarr_ListDpos[0]||gfarr_ListDposLast[1]!=gfarr_ListDpos[1]||gfarr_ListDposLast[2]!=gfarr_ListDpos[2])
{
GetDlgItem(IDC_EDIT_DPOS_X)->SetWindowText(L"X:"+FloatToCString(gfarr_ListDpos[0]));
GetDlgItem(IDC_EDIT_DPOS_Y)->SetWindowText(L"Y:"+FloatToCString(gfarr_ListDpos[1]));
GetDlgItem(IDC_EDIT_DPOS_A)->SetWindowText(L"A:"+FloatToCString(gfarr_ListDpos[2]));
gfarr_ListDposLast[0]=gfarr_ListDpos[0];
gfarr_ListDposLast[1]=gfarr_ListDpos[1];
gfarr_ListDposLast[2]=gfarr_ListDpos[2];
InvalidateRect(m_rcView,false);//刷新繪圖
}
CDialogEx::OnTimer(nIDEvent);
}
4.消息傳遞函數(shù)中響應(yīng)手動運動按鈕代碼。
BOOLCZCadToolFollowDemoDlg::PreTranslateMessage(MSG*pMsg)
{
//TODO:在此添加專用代碼和/或調(diào)用基類
//MFC界面按鈕檢測
if(pMsg->message==WM_LBUTTONDOWN)
{
if(pMsg->hwnd==GetDlgItem(IDC_BTN_X_A)->m_hWnd){ZAux_Direct_Single_Vmove(g_handle,0,1);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_X_B)->m_hWnd){ZAux_Direct_Single_Vmove(g_handle,0,-1);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_Y_A)->m_hWnd){ZAux_Direct_Single_Vmove(g_handle,1,1);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_Y_B)->m_hWnd){ZAux_Direct_Single_Vmove(g_handle,1,-1);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_A_A)->m_hWnd){ZAux_Direct_Single_Vmove(g_handle,2,1);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_A_B)->m_hWnd){ZAux_Direct_Single_Vmove(g_handle,2,-1);}
}
elseif(pMsg->message==WM_LBUTTONUP||WM_LBUTTONDBLCLK==pMsg->message)//判斷是否有MFC界面按鈕彈起
{
if(pMsg->hwnd==GetDlgItem(IDC_BTN_X_A)->m_hWnd){ZAux_Direct_Single_Cancel(g_handle,0,2);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_X_B)->m_hWnd){ZAux_Direct_Single_Cancel(g_handle,0,2);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_Y_A)->m_hWnd){ZAux_Direct_Single_Cancel(g_handle,1,2);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_Y_B)->m_hWnd){ZAux_Direct_Single_Cancel(g_handle,1,2);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_A_A)->m_hWnd){ZAux_Direct_Single_Cancel(g_handle,2,2);}
if(pMsg->hwnd==GetDlgItem(IDC_BTN_A_B)->m_hWnd){ZAux_Direct_Single_Cancel(g_handle,2,2);}
}
returnCDialogEx::PreTranslateMessage(pMsg);
}
5.繪圖函數(shù)。
voidCZCadToolFollowDemoDlg::OnDraw(CDC*pDC) { CDCdcMem; CBitmapbmp; GetDlgItem(IDC_PIC_VIEW)->GetClientRect(m_rcView); dcMem.CreateCompatibleDC(pDC); bmp.CreateCompatibleBitmap(pDC,m_rcView.Width(),m_rcView.Height()); dcMem.SelectObject(&bmp); //繪制背景,默認黑色背景 dcMem.FillSolidRect(m_rcView,RGB(0,0,0)); //顯示當(dāng)前加載的文件名 SetTextColor(dcMem.m_hDC,RGB(125,125,125)); TextOut(dcMem.m_hDC,5,5,m_strCurFileName,m_strCurFileName.GetLength()); //實際顯示的區(qū)域,預(yù)留邊距(不完全撐滿) doubleWinWidth=m_rcView.Width()-65; doubleWinHeight=m_rcView.Height()-65; //實際的區(qū)域 doubleObjectPixWidth=0.0,ObjectPixHeight=0.0; //需要更新初始化顯示比例 if(!m_bInitZoomTran) { //根據(jù)視圖范圍、圖形范圍,計算顯示比例及偏移 if((NULL!=m_pVectGroup)||(NULL!=m_pDib)) { floatfLeft=0.0,fBottom=0.0,fWidth=0.0,fHeight=0.0; doubledScale=0.0; //顯示圖形還是位圖,同時只顯示一種 Struct_ZCad_Item*pShowData=m_pVectGroup?(Struct_ZCad_Item*)m_pVectGroup:(Struct_ZCad_Item*)m_pDib; //獲取當(dāng)前圖形范圍 ZMotionCad3_GetRange((Struct_ZCad_Item*)pShowData,&fLeft,&fBottom,&fWidth,&fHeight,0.05); if(fWidth0.0001&&fabs(fHeight)<=?0.0001) ????????????{ ????????????????ObjectPixWidth?=?WinWidth; ????????????????ObjectPixHeight?=?ObjectPixWidth?*?fHeight?/?fWidth; ????????????????dScale?=?ObjectPixWidth?/?fWidth; ????????????} ????????????else ????????????{ ????????????????if?(fWidth*WinHeight?BitBlt(m_rcView.left,?m_rcView.top,?m_rcView.Width(),?m_rcView.Height(),?&dcMem,?0,?0,?SRCCOPY); ????DeleteObject(dcMem);?//清理資源 ????DeleteObject(bmp); }
6.打開CAD圖處理函數(shù)。
//打開CAD文件
voidCZCadToolFollowDemoDlg::OnBnClickedBtnOpenCad()
{
CStringgReadFilePathName;
CFileDialogfileDlg(true,_T("dxf"),_T("*.dxf"),OFN_HIDEREADONLY|OFN_OVERWRITEPROMPT,_T("DXFFiles(*.dxf)|*.dxf|AIFile(*.ai)|*.ai|PLTFile(*.plt)|*.plt|DSTFiles(*.dst)|*.dst|AllFiles(*.*)|*.*||"),NULL);
if(fileDlg.DoModal()==IDOK)//彈出對話框
{
gReadFilePathName=fileDlg.GetPathName();//得到完整的文件名和目錄名拓展名
CStringfilename=fileDlg.GetFileName();
//取得擴展名
CStringstrExtName=filename.Mid(filename.ReverseFind(_T('.'))+1);//文件擴張名
strExtName.MakeLower();
//清除之前加載的
if(NULL!=m_pVectGroup)
{
ZMotionCad3_ItemDelete((Struct_ZCad_Item*)m_pVectGroup);
m_pVectGroup=NULL;
}
if(NULL!=m_pDib)
{
ZMotionCad3_ItemDelete((Struct_ZCad_Item*)m_pDib);
m_pDib=NULL;
}
//加載文件
if((strExtName=="dxf")||(strExtName=="ai")||(strExtName=="dst")||(strExtName=="plt"))
{
//圖形文件
m_pVectGroup=ZMotionCad3_ImportVectGraph(CW2A(gReadFilePathName),1016.0,ZCAD_IMPORTVECT_SEGES,0.05,false);
}
else
{
//其他格式按位圖文件處理
m_pDib=ZMotionCad3_ImportImage(CW2A(gReadFilePathName),ZCAD_IMPORT_IMAGE_OPTION_NONE);
}
//CAD圖數(shù)據(jù)轉(zhuǎn)G代碼并生成運動數(shù)據(jù)鏈表
CStringm_strGcode=VectToNcCode(m_pVectGroup);
//打印運動數(shù)據(jù)到輸出窗口
CncLinkedList_Printf(m_pCncData);
//刷新G代碼顯示窗口
GetDlgItem(IDC_EDIT_GCODE)->SetWindowText(m_strGcode);
//刷新視圖
InvalidateRect(m_rcView,false);
//設(shè)置刷新狀態(tài)
m_bInitZoomTran=false;
//更新當(dāng)前文件名
m_strCurFileName=filename;
}
}
7.CAD圖層數(shù)據(jù)轉(zhuǎn)G代碼函數(shù)。
//圖形轉(zhuǎn)G代碼
CStringCZCadToolFollowDemoDlg::VectToNcCode(Struct_ZCad_VectGroup*pVectGroup)
{
if(!pVectGroup)
{//圖形數(shù)據(jù)為空
AfxMessageBox(L"數(shù)據(jù)為空!");
returnL"";
}
CncLinkedList_ClearMyList(m_pCncData);
m_pCncData=CncLinkedList_CreatList();
CStringstrOut,strSingleLen;//輸出的G代碼
strOut.Format(L"M3rnG90rnG0X0.000Y0.000rn");//默認絕對運行
CncLinkedList_StringToLink(L"G0X0.000Y0.000",m_pCncData);//G代碼字符串轉(zhuǎn)入鏈表中
Struct_ZCad_VectGroup*pGroupHead=pVectGroup;
while(pGroupHead)
{
Struct_ZCad_Vect*pVectHead=pGroupHead->m_pVect;
Struct_ZCad_Seg*pEffectSeg=NULL;//有效數(shù)據(jù)
while(pVectHead)
{
if(ZCAD_ITEMTYPE_VECTLine!=pVectHead->m_itemtype&&!pVectHead->m_pLineSeg)
{//曲線全部轉(zhuǎn)為小線段處理
ZMotionCadEx_CurveSmooth((Struct_ZCad_Item*)pVectHead,0.05,false,true);
}
pEffectSeg=pVectHead->m_pLineSeg?pVectHead->m_pLineSeg:pVectHead->m_pLine;
//快速定位
strSingleLen.Format(L"G0X%.4lfY%.4lfrn",pEffectSeg->x1,pEffectSeg->y1);
CncLinkedList_StringToLink(strSingleLen,m_pCncData);
strOut+=strSingleLen;
if(ZCAD_ITEMTYPE_VECTArc==pVectHead->m_itemtype)
{//圓/圓弧的情況下//不會進入此if,全部轉(zhuǎn)小線段處理
CStringstrSide;//圓的方向
doubledX0=min(pVectHead->m_pLine->x1,pVectHead->m_pLine->x2)+fabs(pVectHead->m_pLine->x1-pVectHead->m_pLine->x2)/2;
doubledY0=min(pVectHead->m_pLine->y1,pVectHead->m_pLine->y2)+fabs(pVectHead->m_pLine->y1-pVectHead->m_pLine->y2)/2;//圓心的絕對坐標(biāo)
doubledR=fabs(pVectHead->m_pLine->x1-pVectHead->m_pLine->x2)/2.0;//半徑
if(pVectHead->m_pLine->x1m_pLine->x2&&pVectHead->m_pLine->y1m_pLine->y2)
{//逆時針G03
strSide="G3";
}
else
{//順時針G02
strSide="G2";
}
strSingleLen.Format(L"%sX%.4lfY%.4lfI%.4lfJ%.4lfrn",strSide,pEffectSeg->m_prev->x2,pEffectSeg->m_prev->y2,dX0-pEffectSeg->x1,dY0-pEffectSeg->y1);
CncLinkedList_StringToLink(strSingleLen,m_pCncData);
strOut+=strSingleLen;
}
else
{
Struct_ZCad_Seg*pHeadSeg=pEffectSeg;
while(pHeadSeg)
{//直線插補
strSingleLen.Format(L"G1X%.4lfY%.4lfrn",pHeadSeg->x2,pHeadSeg->y2);
CncLinkedList_StringToLink(strSingleLen,m_pCncData);
strOut+=strSingleLen;
pHeadSeg=pHeadSeg->m_pnext;
if(pHeadSeg==pEffectSeg)
{
break;
}
}
}
pVectHead=pVectHead->m_pnext;
if(pVectHead==pGroupHead->m_pVect)
{
break;
}
}
pGroupHead=pGroupHead->m_pnext;
if(pGroupHead==pVectGroup)
{
break;
}
}
strSingleLen.Format(L"M2");
CncLinkedList_StringToLink(strSingleLen,m_pCncData);
strOut+=strSingleLen;
returnstrOut;
}
8.計算直線向量角度函數(shù)。
//第一條直線起點,終點;第二條直線起點終點
doubleGetLineVectorArg(doubleline1StartX,doubleline1StartY,doubleline1EndX,doubleline1EndY)
{
floata[4];//存放第一個向量的起點和重點
floatb[4];//存放第二個向量的起點和重點
a[0]=line1StartX;
a[1]=line1StartY;
a[2]=line1EndX;
a[3]=line1EndY;
if(a[0]==a[2]&&a[1]==a[3])
{
return0;
}
b[0]=0;
b[1]=0;
b[2]=1000;
b[3]=0;
floatvector1x=a[0]-a[2];
floatvector1y=a[1]-a[3];
floatvector2x=b[0]-b[2];
floatvector2y=b[1]-b[3];
CStringTRACEtest;
floatang=0;
//θ=acos(v1?v2/||v1||||v2||)
floattmp=((vector1x)*(vector2x)+(vector1y)*(vector2y))/(sqrt(pow(vector1x,2)+pow(vector1y,2))*sqrt(pow(vector2x,2)+pow(vector2y,2)));
//θ=atan2(v2.y,v2.x)?atan2(v1.y,v1.x)doubletmp2=(atan2(vector2y,vector2x)-atan2(vector1y,vector1x))*(180/PI);ang=acos(tmp)*(180/PI);
if(int(ang)==90)
if(line1StartY
9.G代碼字符串轉(zhuǎn)數(shù)據(jù)鏈表函數(shù)。voidCZCadToolFollowDemoDlg::CncLinkedList_StringToLink(CStringFileContentLine,struct_CncData*CncData)
{
FileContentLine.TrimRight();//去掉右邊的空格
FileContentLine.TrimLeft();//去掉左邊的空格
FileContentLine.Replace(_T(""),_T(""));
struct_MoveDatamovepara;
CncLinkedList_InsertNodebyTail(CncData,movepara);
//找到最后一個節(jié)點
struct_CncData*cncData_lastNode=CncData;
while(cncData_lastNode->m_pnext!=CncData)
{
cncData_lastNode=cncData_lastNode->m_pnext;//往下走
}
if(FileContentLine.Find('G')!=-1)
{
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
CStringstr_tmp=FileContentLine.Right(FileContentLine.GetLength()-FileContentLine.Find('G')-1);//剩余G后字符串
intnum_tmp=_tstof(str_tmp);
CStringstr_tmp90,str_tmpX,str_tmpY,str_tmpZ,str_tmpI,str_tmpJ,str_tmpD;
AfxExtractSubString(str_tmpX,(LPCTSTR)FileContentLine,1,'X');
AfxExtractSubString(str_tmpY,(LPCTSTR)FileContentLine,1,'Y');
AfxExtractSubString(str_tmpI,(LPCTSTR)FileContentLine,1,'I');
AfxExtractSubString(str_tmpJ,(LPCTSTR)FileContentLine,1,'J');
AfxExtractSubString(str_tmpD,(LPCTSTR)FileContentLine,1,'D');
/****************************G運動類型賦值*******************************************/
switch(num_tmp)
{
caseCNC_TRACK_LINE_SEEK://0定位
cncData_lastNode->m_movepara.m_type=CNC_TRACK_LINE_SEEK;
break;
caseCNC_TRACK_LINE://1直線
cncData_lastNode->m_movepara.m_type=CNC_TRACK_LINE;
break;
caseCNC_TRACK_ARC://2圓弧
cncData_lastNode->m_movepara.m_type=CNC_TRACK_ARC;
break;
caseCNC_TRACK_ARC_CCW://3圓弧
cncData_lastNode->m_movepara.m_type=CNC_TRACK_ARC_CCW;
break;
default:
cncData_lastNode->m_movepara.m_type=CNC_TRACK_OTHER;
break;
}
/****************************G運動坐標(biāo)賦值*******************************************/
{
if(str_tmpX.GetLength()>0)
{
cncData_lastNode->m_movepara.m_end.x=_tstof(str_tmpX);
}
else
{
cncData_lastNode->m_movepara.m_end.x=CNC_XYZIJ_NULL;
}
if(str_tmpY.GetLength()>0)
{
cncData_lastNode->m_movepara.m_end.y=_tstof(str_tmpY);
}
else
{
cncData_lastNode->m_movepara.m_end.y=CNC_XYZIJ_NULL;
}
if(str_tmpI.GetLength()>0)
{
cncData_lastNode->m_movepara.m_center.x=_tstof(str_tmpI);
}
else
{
cncData_lastNode->m_movepara.m_center.x=CNC_XYZIJ_NULL;
}
if(str_tmpJ.GetLength()>0)
{
cncData_lastNode->m_movepara.m_center.y=_tstof(str_tmpJ);
}
else
{
cncData_lastNode->m_movepara.m_center.y=CNC_XYZIJ_NULL;
}
}
//獲取起點坐標(biāo)
floatstartx,starty,endx,endy;
startx=CNC_XYZIJ_NULL;
starty=CNC_XYZIJ_NULL;
endx=cncData_lastNode->m_movepara.m_end.x;
endy=cncData_lastNode->m_movepara.m_end.y;
if(CNC_XYZIJ_NULL==endx&&CNC_XYZIJ_NULL==endy)
{
return;
}
if(CNC_TRACK_LINE==cncData_lastNode->m_movepara.m_type||CNC_TRACK_ARC==cncData_lastNode->m_movepara.m_type||CNC_TRACK_ARC_CCW==cncData_lastNode->m_movepara.m_type)
{
struct_CncData*cncData_lastNode_prev=cncData_lastNode;
intliv_type=-1;
while(true)
{
cncData_lastNode_prev=cncData_lastNode_prev->m_pprev;
liv_type=cncData_lastNode_prev->m_movepara.m_type;
if((0==liv_type||1==liv_type||2==liv_type||3==liv_type))
{
break;
}
}
startx=cncData_lastNode_prev->m_movepara.m_end.x;
starty=cncData_lastNode_prev->m_movepara.m_end.y;
if(startx!=CNC_XYZIJ_NULL&&startx!=CNC_XYZIJ_NULL)
{
cncData_lastNode->m_movepara.m_start.x=startx;
cncData_lastNode->m_movepara.m_start.y=starty;
}
else
{
AfxMessageBox(L"cncData_lastNode->m_movepara.m_start.x=CNC_XYZIJ_NULL;");
cncData_lastNode->m_movepara.m_start.x=CNC_XYZIJ_NULL;
cncData_lastNode->m_movepara.m_start.y=CNC_XYZIJ_NULL;
}
}
switch(num_tmp)
{
caseCNC_TRACK_LINE_SEEK://0定位
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=CNC_TRACK_LINE_SEEK;
break;
caseCNC_TRACK_LINE://1直線
{
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=CNC_TRACK_LINE;
cncData_lastNode->m_movepara.m_angleStart=GetLineVectorArg(startx,starty,endx,endy);
cncData_lastNode->m_movepara.m_angleEnd=GetLineVectorArg(startx,starty,endx,endy);
break;
}
caseCNC_TRACK_ARC://2圓弧
{
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=CNC_TRACK_ARC;
floatm_c_x=startx+cncData_lastNode->m_movepara.m_center.x;//圓心絕對坐標(biāo)
floatm_c_y=starty+cncData_lastNode->m_movepara.m_center.y;
cncData_lastNode->m_movepara.m_angleStart=GetCircVectorArgG02(startx,starty,m_c_x,m_c_y);
cncData_lastNode->m_movepara.m_angleEnd=GetCircVectorArgG02(cncData_lastNode->m_movepara.m_end.x,cncData_lastNode->m_movepara.m_end.y,m_c_x,m_c_y);
if(cncData_lastNode->m_movepara.m_angleStart==cncData_lastNode->m_movepara.m_angleEnd)
{
cncData_lastNode->m_movepara.m_angleEnd+=360;
}
if(cncData_lastNode->m_movepara.m_angleEnd-cncData_lastNode->m_movepara.m_angleStart>180)
{
cncData_lastNode->m_movepara.m_angleEnd-=360;
}
break;
}
caseCNC_TRACK_ARC_CCW://3圓弧
{
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=CNC_TRACK_ARC_CCW;
floatm_c_x=startx+cncData_lastNode->m_movepara.m_center.x;//圓心絕對坐標(biāo)
floatm_c_y=starty+cncData_lastNode->m_movepara.m_center.y;
cncData_lastNode->m_movepara.m_angleStart=GetCircVectorArgG03(startx,starty,m_c_x,m_c_y);
cncData_lastNode->m_movepara.m_angleEnd=GetCircVectorArgG03(cncData_lastNode->m_movepara.m_end.x,cncData_lastNode->m_movepara.m_end.y,m_c_x,m_c_y);
if(cncData_lastNode->m_movepara.m_angleStart==cncData_lastNode->m_movepara.m_angleEnd)
{
cncData_lastNode->m_movepara.m_angleEnd+=360;
}
break;
}
default:
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=CNC_TRACK_OTHER;
break;
}
}
else//M
{
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
CStringstr_tmp=FileContentLine.Right(FileContentLine.GetLength()-FileContentLine.Find('M')-1);//剩余M后字符串
intnum_tmp=_tstof(str_tmp);
switch(num_tmp)
{
case3://開始切割
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=CNC_TRACK_START;
break;
case9://下刀
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=CNC_TRACK_TOOL_DOWN;
break;
case10://抬刀
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=CNC_TRACK_TOOL_UP;
break;
case4://切割結(jié)束
case2:
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=4;
break;
case30://M代碼(固定)
if(cncData_lastNode->m_pprev!=NULL)
{
cncData_lastNode->m_movepara.m_length=cncData_lastNode->m_pprev->m_movepara.m_length+1;
}
cncData_lastNode->m_movepara.m_type=24;
break;
default:
break;
}
}
//free(cncData_lastNode);
}
10.運動線程函數(shù)。intCZCadToolFollowDemoDlg::CncLinkedList_Move(struct_CncData*List)
{
if(NULL==List)
{
return-1;
}
struct_CncData*ptr=List->m_pnext;
CStringm_ShowData=L"";
floatfX=0.0f,fY=0.0f,fC=0.0f,fI=0.0f,fJ=0.0f;
intaxislist[3]={0,1,2};//運動軸列表,其中軸1為主軸
floatcirc_endc=0.0f,circ_stratc=0.0f;
floatposlist[3]={0.0f};
intm_liv_ZmcMoveRe=0;
floatlfv_SpeedG00=1000;
floatlfv_SpeedG01=300;
ZAux_Direct_SetForceSpeed(g_handle,0,lfv_SpeedG00);//設(shè)置G00定位速度
ZAux_Direct_SetSpeed(g_handle,0,lfv_SpeedG01);//設(shè)置G01直線速度
while(ptr!=List){
fX=ptr->m_movepara.m_end.x;
fY=ptr->m_movepara.m_end.y;
fC=ptr->m_movepara.m_angleEnd;
switch(ptr->m_movepara.m_type)
{
caseCNC_TRACK_START://切割開始
{
break;
}
caseCNC_TRACK_LINE_SEEK://0定位
{
m_ShowData.Format(_T("G00X%fY%frn"),fX,fY);
TRACE(m_ShowData);
struct_CncData*cncData_lastNode_next=ptr;
intliv_type=-1;
while(true)
{
cncData_lastNode_next=cncData_lastNode_next->m_pnext;
liv_type=cncData_lastNode_next->m_movepara.m_type;
if((0==liv_type||1==liv_type||2==liv_type||3==liv_type)){break;}
}
circ_stratc=cncData_lastNode_next->m_movepara.m_angleStart;
circ_endc=cncData_lastNode_next->m_movepara.m_angleEnd;
poslist[0]=fX;
poslist[1]=fY;
poslist[2]=circ_stratc;
do
{
m_liv_ZmcMoveRe=ZAux_Direct_MovePara(g_handle,0,"MERGE",0,0);
if(m_liv_ZmcMoveRe)
{
Sleep(10);
if(h_ThreadMovePorc)return-1;
}
}while(m_liv_ZmcMoveRe);
do
{
m_liv_ZmcMoveRe=ZAux_Direct_MoveAbsSp(g_handle,3,axislist,poslist);
if(m_liv_ZmcMoveRe)
{
Sleep(10);
if(h_ThreadMovePorc)return-1;
}
}while(m_liv_ZmcMoveRe);
break;
}
caseCNC_TRACK_LINE://1直線//直線不用轉(zhuǎn)刀,但是如果G01與G01,不是G00與G01,運動結(jié)束后需要轉(zhuǎn)刀
{
m_ShowData.Format(_T("G01X%fY%frn"),fX,fY);
TRACE(m_ShowData);
do{
m_liv_ZmcMoveRe=ZAux_Direct_MovePara(g_handle,0,"MERGE",0,1);
if(m_liv_ZmcMoveRe)
{
Sleep(10);
if(h_ThreadMovePorc)return-1;
}
}while(m_liv_ZmcMoveRe);
if(ptr->m_pprev->m_movepara.m_type==CNC_TRACK_LINE||ptr->m_pprev->m_movepara.m_type==CNC_TRACK_ARC||ptr->m_pprev->m_movepara.m_type==CNC_TRACK_ARC_CCW)
{
poslist[0]=fX;
poslist[1]=fY;
poslist[2]=ptr->m_movepara.m_angleEnd;
do
{
m_liv_ZmcMoveRe=ZAux_Direct_MoveAbs(g_handle,3,axislist,poslist);
if(m_liv_ZmcMoveRe)
{
Sleep(10);
if(h_ThreadMovePorc)return-1;
}
}while(m_liv_ZmcMoveRe);
TRACE("rn");
}
else
{
fX=ptr->m_movepara.m_end.x;
fY=ptr->m_movepara.m_end.y;
poslist[0]=fX;
poslist[1]=fY;
do
{
m_liv_ZmcMoveRe=ZAux_Direct_MoveAbs(g_handle,2,axislist,poslist);
if(m_liv_ZmcMoveRe)
{
Sleep(10);
if(h_ThreadMovePorc)return-1;
}
}while(m_liv_ZmcMoveRe);
}
break;
}
}
ptr=ptr->m_pnext;
}
return0;
}
七.效果演示
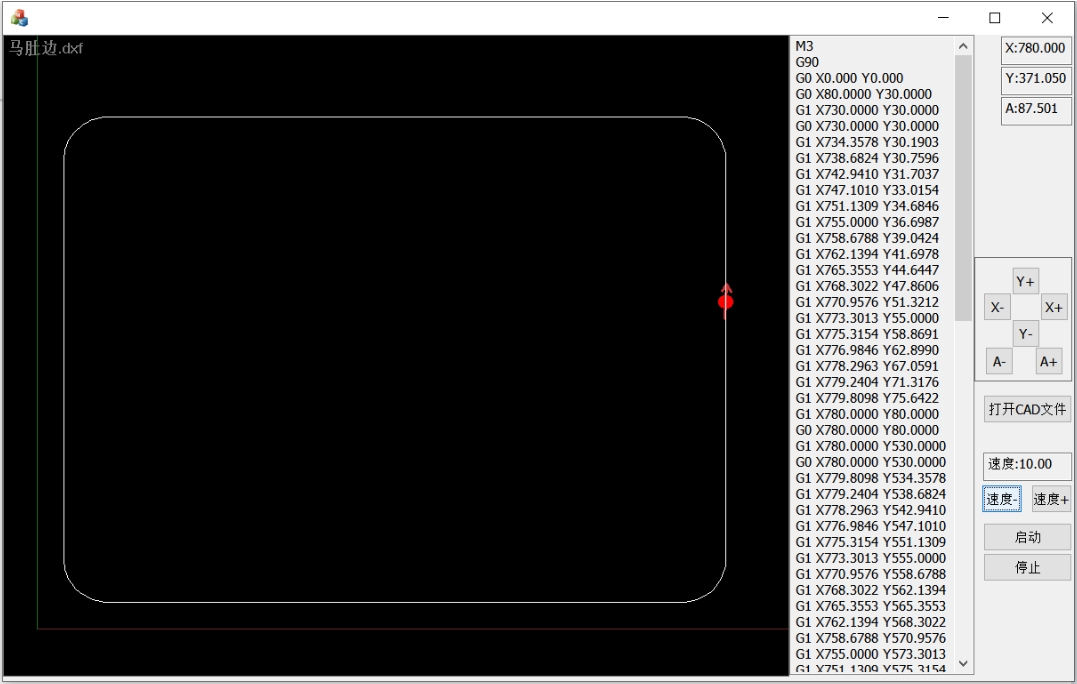
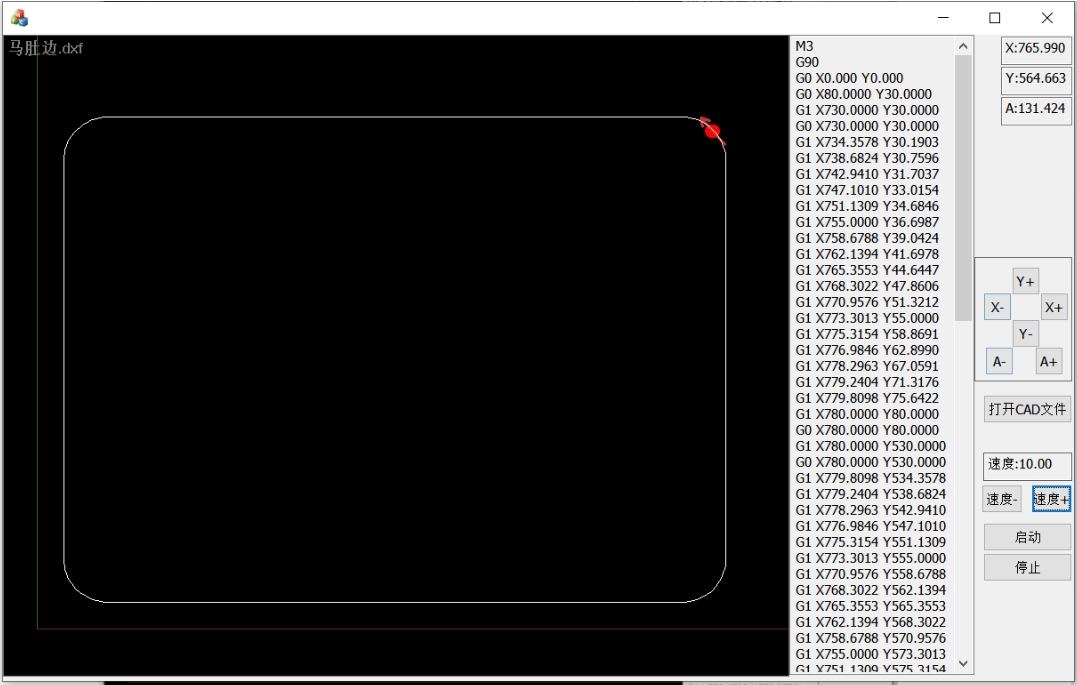
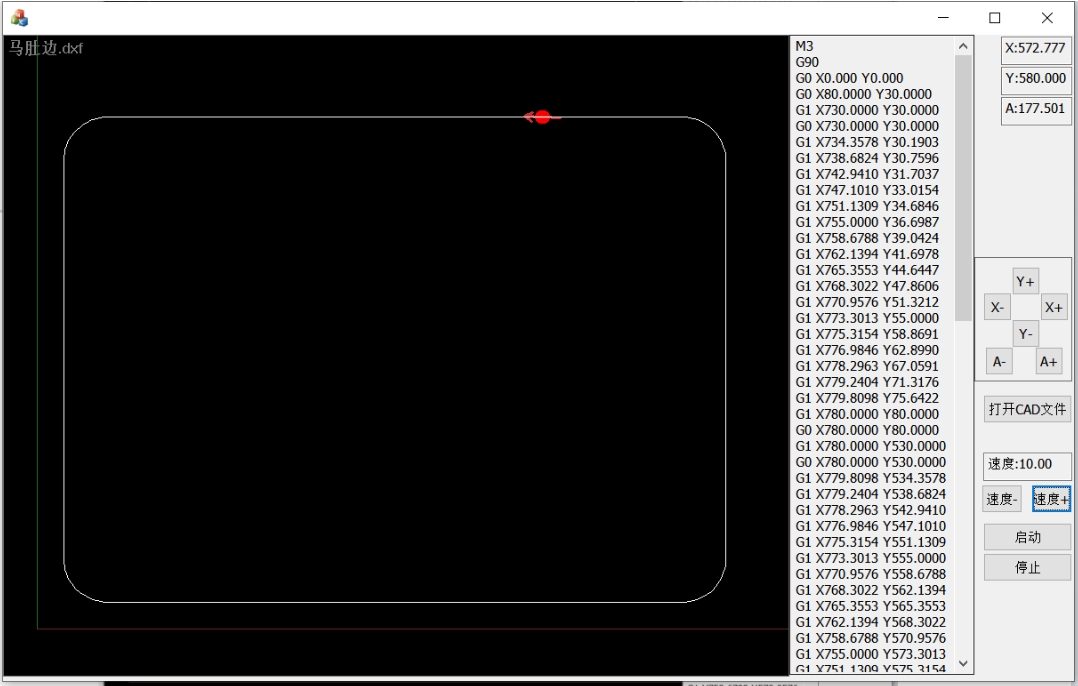
視頻講解可點擊→“PCIe EtherCAT實時運動控制卡PCIE464的CAD導(dǎo)圖與刀向跟隨應(yīng)用”查看。
完整代碼獲取地址
▼

本次,正運動技術(shù)PCIe EtherCAT實時運動控制卡PCIE464的CAD導(dǎo)圖與刀向跟隨應(yīng)用,就分享到這里。
更多精彩內(nèi)容請關(guān)注“正運動小助手”公眾號,需要相關(guān)開發(fā)環(huán)境與例程代碼,請咨詢正運動技術(shù)銷售工程師:400-089-8936。
本文由正運動技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國智能制造水平。文章版權(quán)歸正運動技術(shù)所有,如有轉(zhuǎn)載請注明文章來源。
審核編輯 黃宇
-
CAD
+關(guān)注
關(guān)注
18文章
1144瀏覽量
76822 -
運動控制
+關(guān)注
關(guān)注
5文章
829瀏覽量
34632 -
運動控制卡
+關(guān)注
關(guān)注
7文章
131瀏覽量
16116 -
正運動技術(shù)
+關(guān)注
關(guān)注
0文章
133瀏覽量
903
發(fā)布評論請先 登錄
PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應(yīng)用
【正運動】高速高精,超高實時性的PCIe EtherCAT實時運動控制卡 | PCIE464


PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應(yīng)用# 正運動技術(shù)# 運動控制卡

PCIe EtherCAT實時運動控制卡PCIE464的CAD導(dǎo)圖與刀向跟隨應(yīng)用#正運動技術(shù) #運動控制卡
EtherCAT運動控制卡之ECI2820如何使用
不止10倍提速!PCIe EtherCAT實時運動控制卡XPCIE1032H 等您評測!

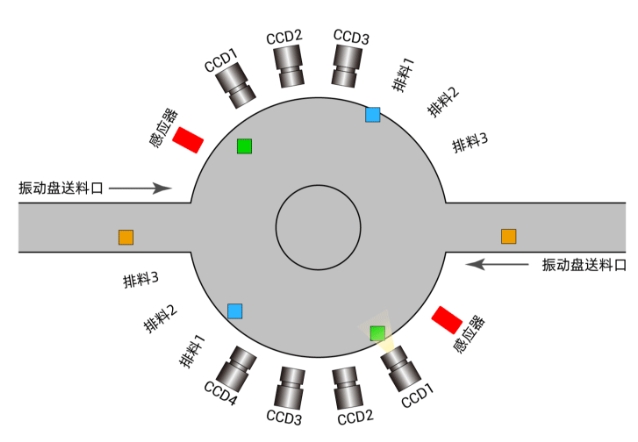
高速視覺篩選機PCIe實時運動控制卡XPCIE1028簡介
超高實時性的EtherCAT運動控制卡——PCIE464
PCIe實時運動控制卡的雙盤視覺篩選機上位機開發(fā)應(yīng)用
PCIe EtherCAT實時運動控制卡PCIE464同步跟隨/皮帶跟隨加工應(yīng)用
全球首創(chuàng)!PCIe超實時6通道EtherCAT運動控制卡上市!



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論