 基于瑞芯微RK3576國產ARM八核2.2GHz A72 工業評估板——ROS2系統使用說明
基于瑞芯微RK3576國產ARM八核2.2GHz A72 工業評估板——ROS2系統使用說明

前 言
本文主要介紹創龍科技TL3576-MiniEVM評估板演示基于Ubuntu的ROS系統(版本:ROS2 Foxy)使用說明,包括鏡像編譯、鏡像替換,以及ROS系統測試的方法。適用開發環境如下。
Windows開發環境:Windows 10 64bit
Linux虛擬機環境:VMware16.2.5、Ubuntu22.04.5 64bit
U-Boot:U-Boot-2017.09
Kernel:Linux-6.1.115
ROS:ROS2 Foxy
ROS(Robot Operating System,下文簡稱"ROS")是一個適用于機器人的開源的元操作系統。它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞,以及包管理。它也提供用于獲取、編譯、編寫、和跨計算機運行代碼所需的工具和庫函數。
我司ROS系統源碼基于ROS官方獲取,并基于瑞芯微官方參考文檔編譯。更多詳細信息請查看“6-開發參考資料Rockchip官方參考文檔LinuxApplicationNote”目錄下的《Rockchip_Instruction_Linux_ROS2_CN》文檔。
請先按照調試工具安裝、開發環境搭建相關文檔,安裝SecureCRT串口調試終端、VMware虛擬機等相關軟件。無特殊說明情況下,本文默認使用Power IN/USB TO UART0作為調試串口,使用eMMC啟動系統,通過路由器與PC機進行網絡連接,請確保PC機、Ubuntu系統可正常訪問互聯網。
評估板簡介
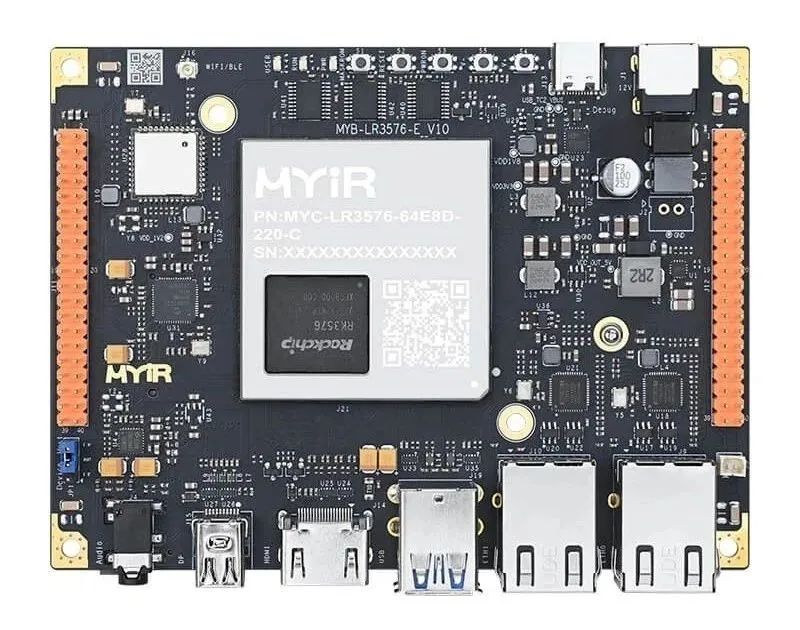
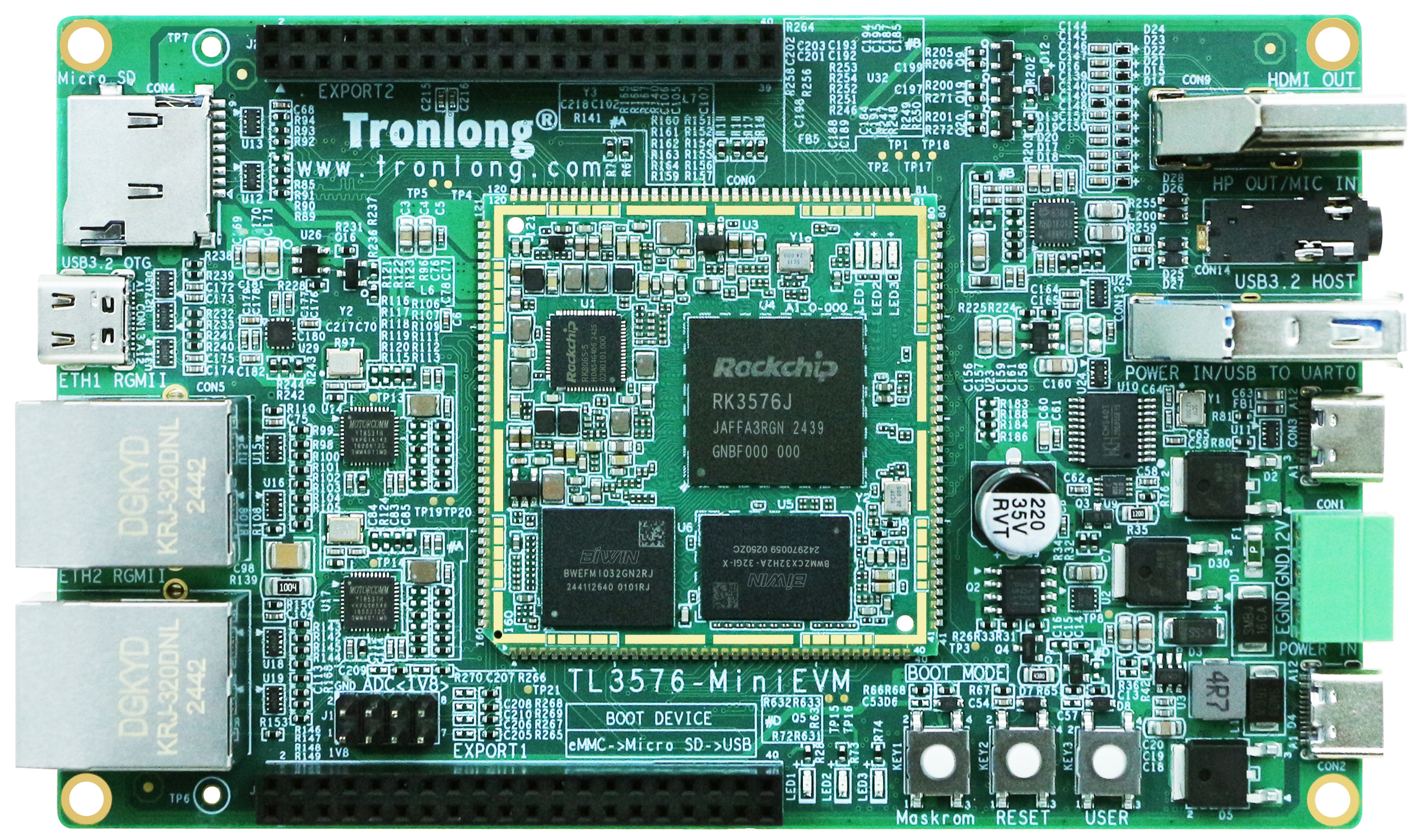
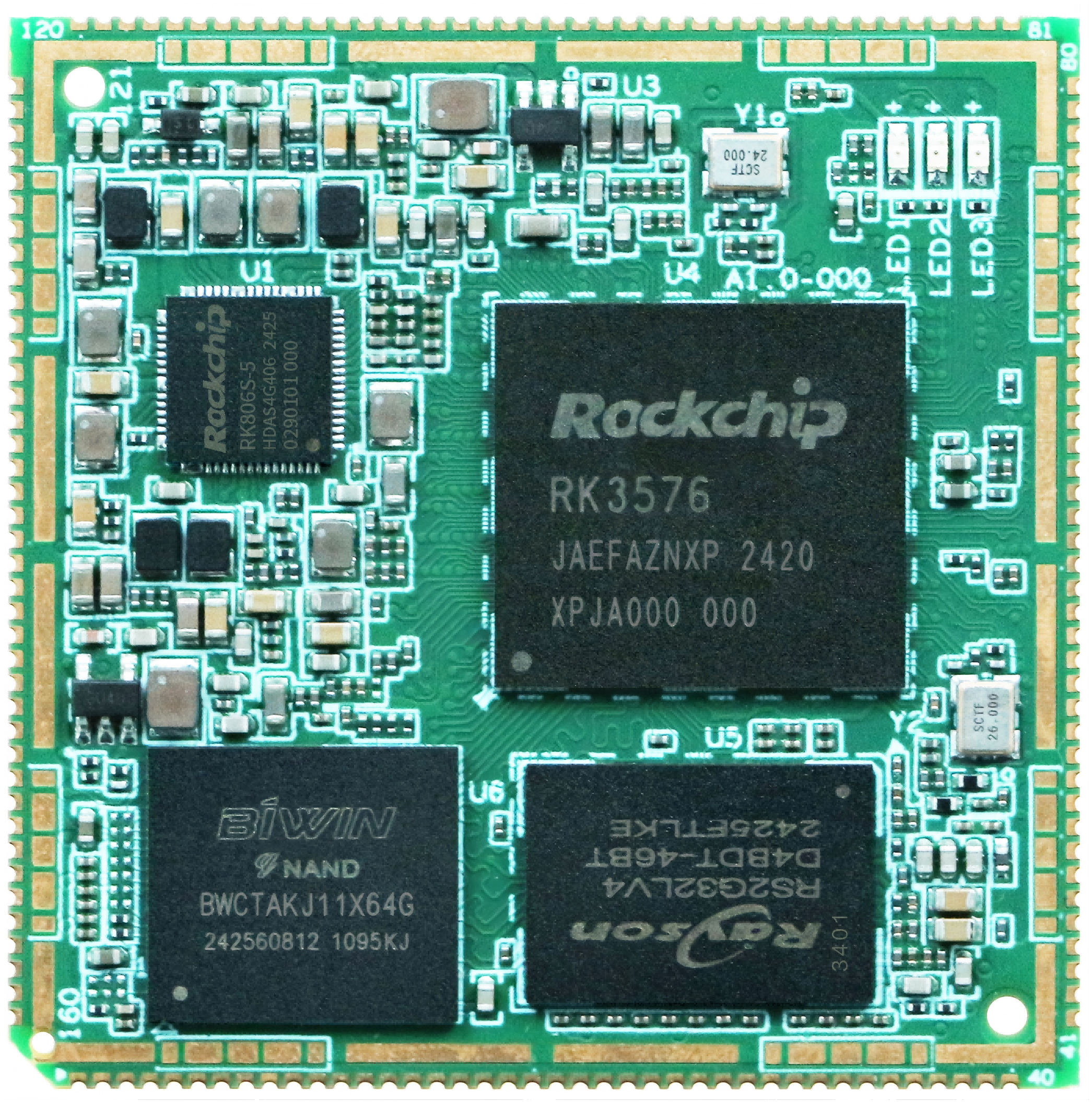
創龍科技TL3576-MiniEVM是一款基于瑞芯微RK3576J/RK3576高性能處理器設計的4核ARM Cortex-A72 + 4核ARM Cortex-A53 + ARM Cortex-M0國產工業評估板,Cortex-A72核心主頻高達2.2GHz,Cortex-A53核心主頻高達2.0GHz。評估板由核心板和評估底板組成,核心板CPU、ROM、RAM、電源、晶振等所有元器件以及評估底板元器件均采用國產工業級方案,國產化率100%。同時,評估底板大部分元器件亦采用國產工業級方案,國產化率約為99%(按元器件數量占比,數據僅供參考)。核心板經過專業的PCB Layout和高低溫測試驗證,支持選配屏蔽罩,質量穩定可靠,可滿足各種工業應用環境要求。
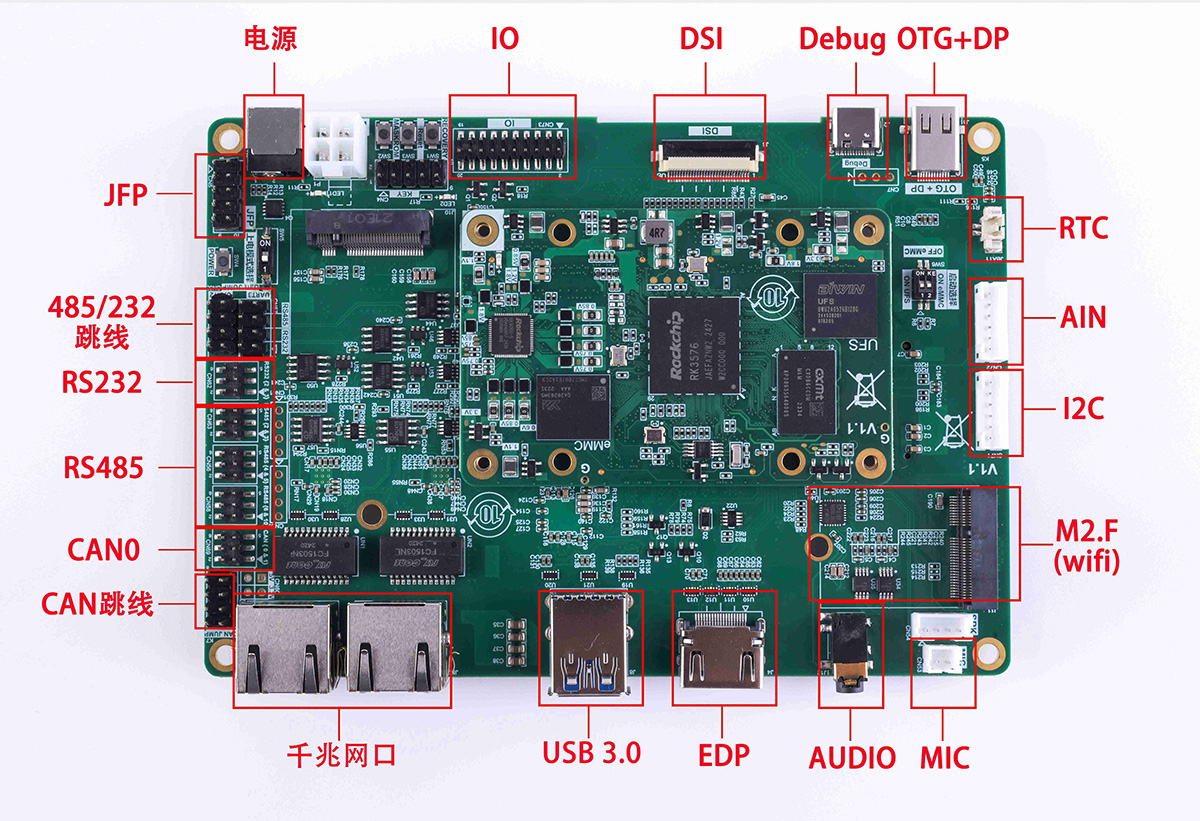
評估板引出2路Ethernet、2路USB、Micro SD、UART等通信接口,同時引出2路MIPI CSI、MIPI DSI、DP Display、HDMI OUT、MIC IN/HP OUT等音視頻多媒體接口,支持4K@60fps H.265/H.264視頻編碼、8K@30fps H.265/4K@60fps H.264視頻解碼。
評估板體積小巧,尺寸為80mm*130mm,可作為卡片式電腦使用,且便于產品集成,方便用戶快速進行產品方案評估與技術預研。

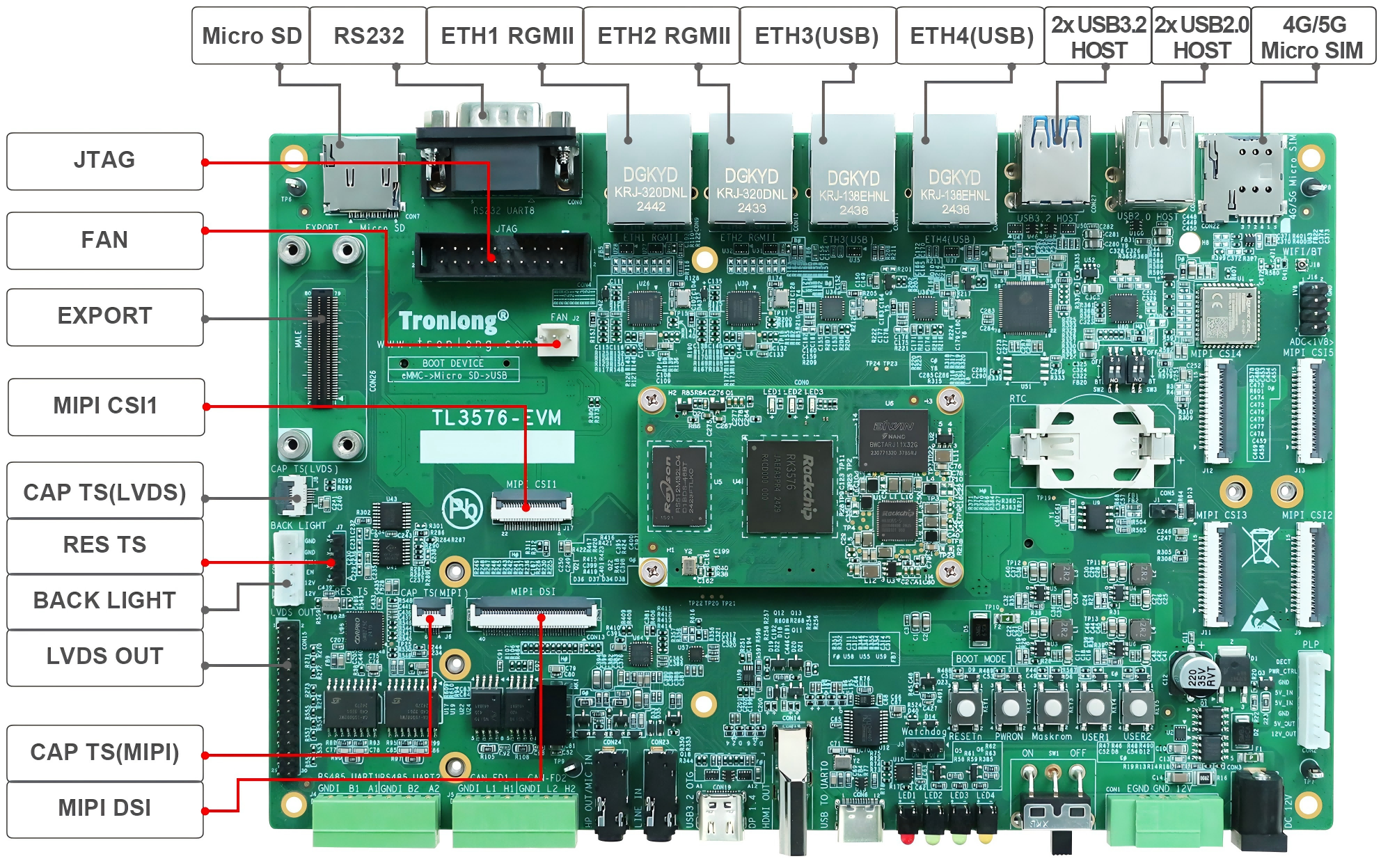
評估板硬件資源圖解1

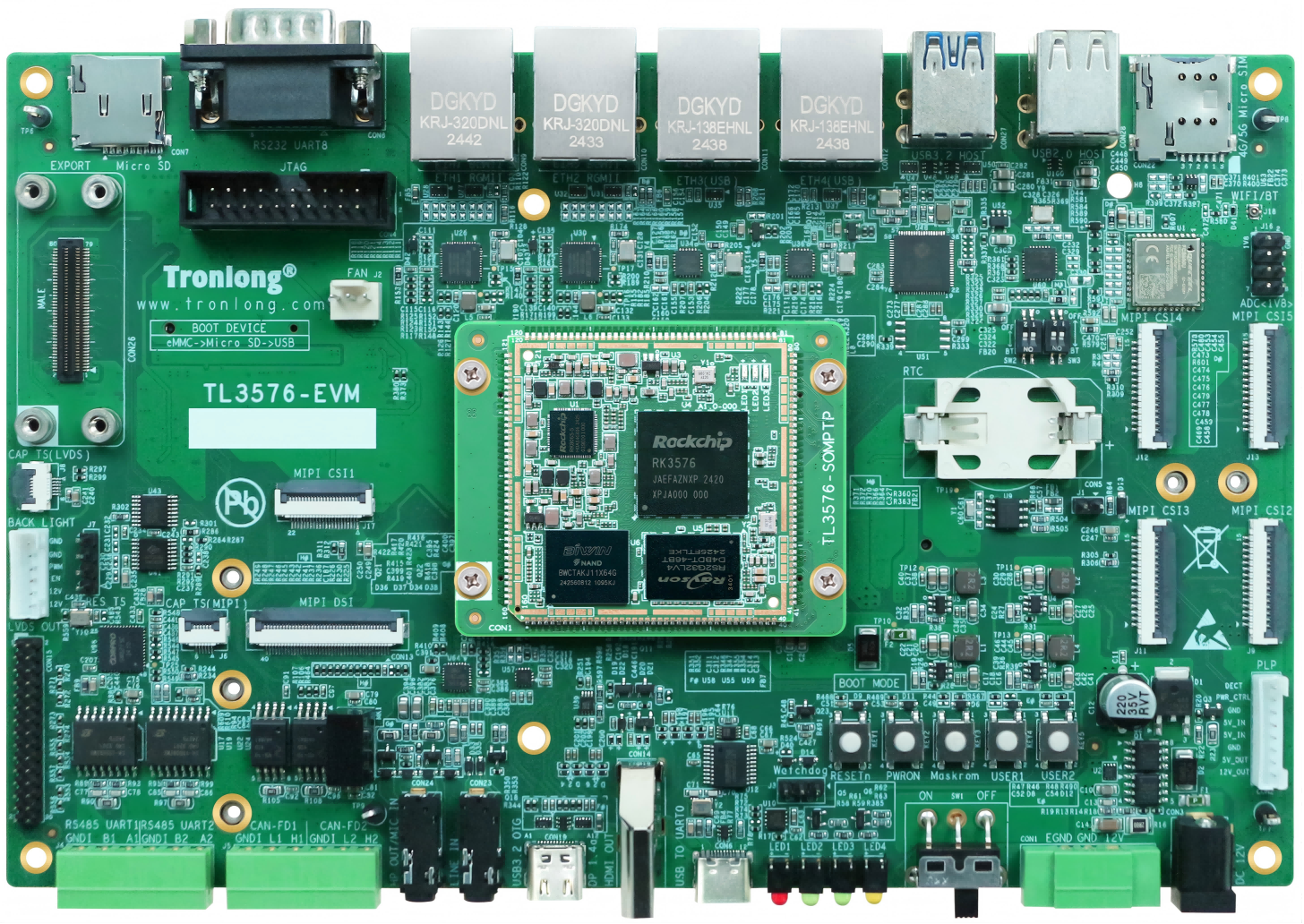
評估板硬件資源圖解2
ROS系統測試
請使用網線將評估板ETH1 RGMII網口、PC機連接至同一個路由器,執行如下命令,安裝netifaces庫。
Target# apt-get update
Target# apt-get install python3-netifaces
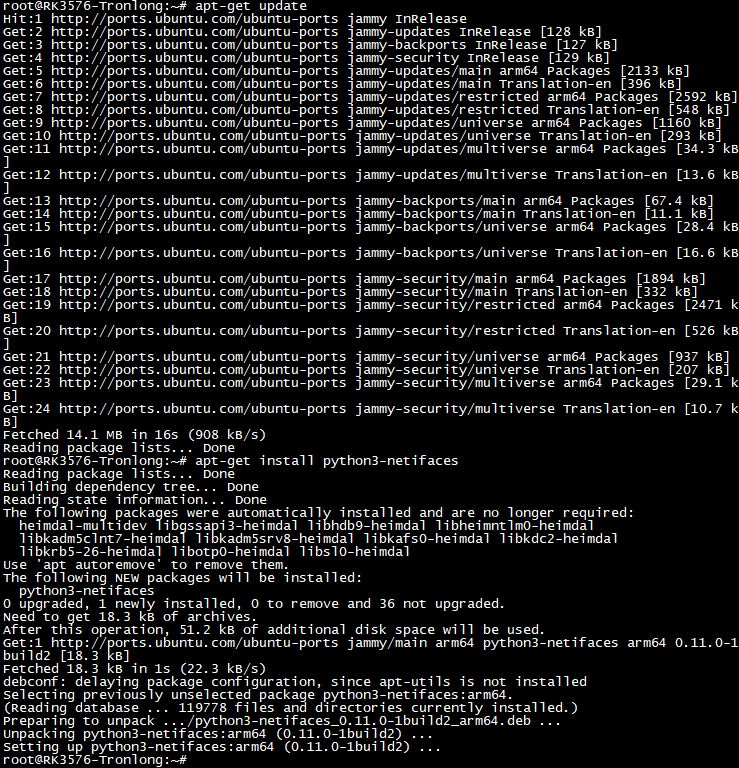
圖 1
執行如下命令,配置評估板測試環境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh

圖 2
執行如下命令,創建Log目錄,用于保存ROS程序運行的Log。
Target# mkdir -p /root/.ros/log

圖 3
執行如下命令,啟動ROS節點訂閱消息。
Target# ros2 run demo_nodes_py listener &

圖 4
執行如下命令,啟動ROS節點發布消息,實現訂閱消息節點與發布消息節點之間的通信。此時評估板串口調試終端將會打印兩節點間通信的信息,如下圖所示。按"Ctrl + C"可退出測試程序,即讓發布消息的節點退出。
Target# ros2 run demo_nodes_py talker
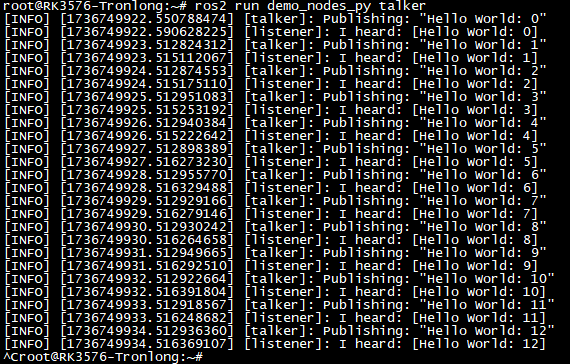
圖 5
執行如下命令,查看并根據系統進程號關閉所有ROS節點。進程號請以實際情況為準。
Target# ps -a
Target# kill 1667
Target# kill 1668
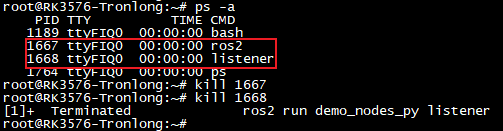
圖 6
基于C++的通信功能測試
執行如下命令,啟動ROS節點訂閱消息。
Target# ros2 run demo_nodes_cpp listener &

圖 7
執行如下命令,啟動ROS節點發布消息,實現訂閱消息節點與發布消息節點之間的通信。此時評估板串口調試終端將會打印兩節點間通信的信息,如下圖所示。按"Ctrl + C"可退出測試程序,即讓發布消息的節點退出。
Target# ros2 run demo_nodes_cpp talker
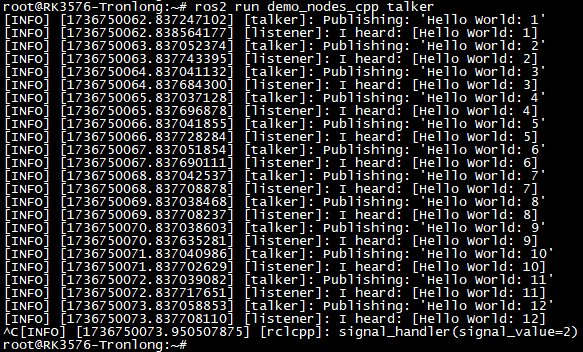
圖 8
執行如下命令,根據系統進程號關閉所有ROS節點。進程號請以實際情況為準。
Target# ps -a
Target# kill 1765
Target# kill 1766
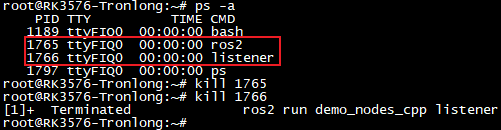
圖 9
turtlesim(小海龜)測試
請使用HDMI線將HDMI顯示器與評估板HDMI OUT接口連接。然后執行如下命令,配置評估板測試環境。
執行如下命令,后臺運行小海龜程序。
Target# ros2 run turtlesim turtlesim_node &

圖 10
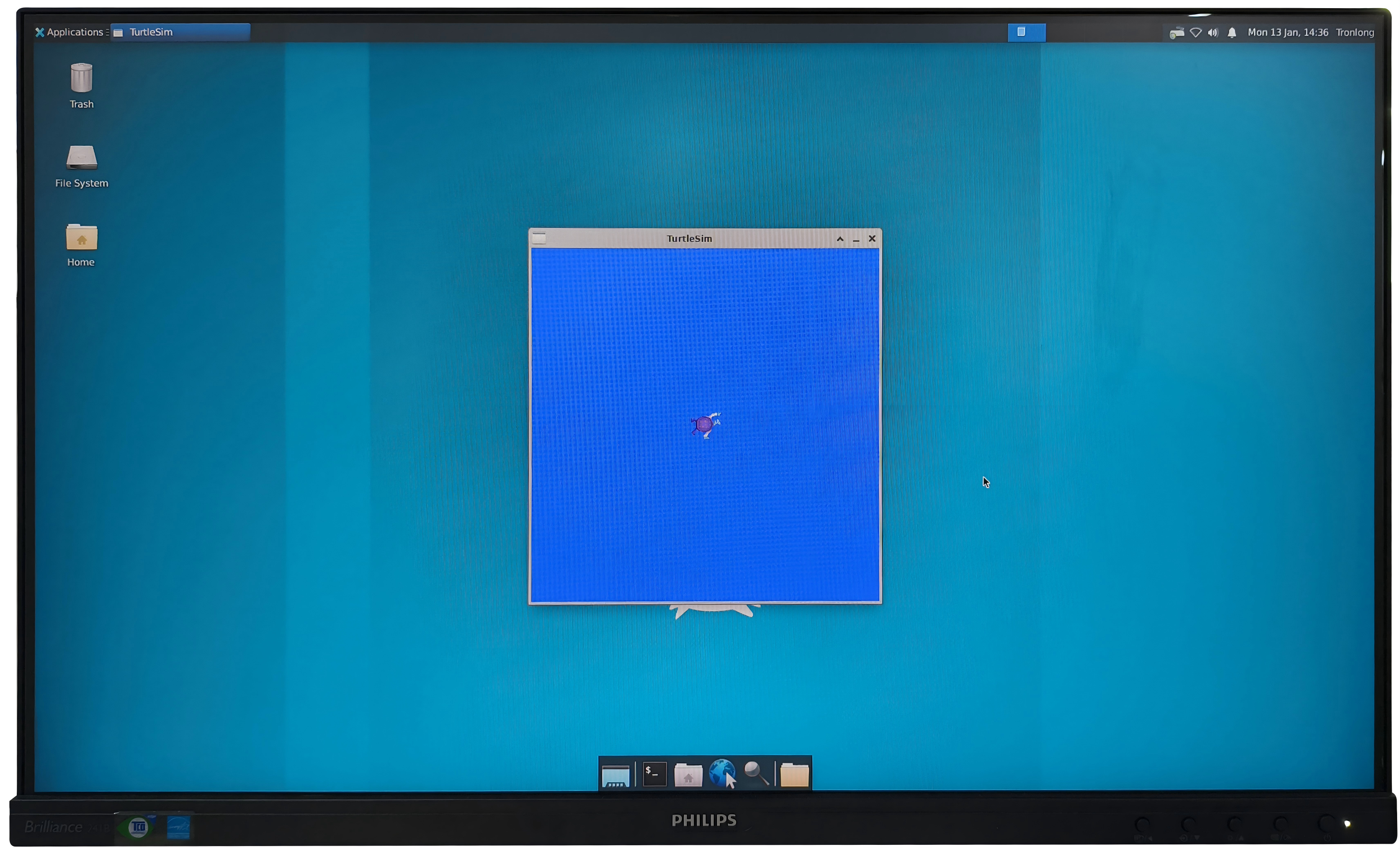
圖 11
執行如下命令,發布話題消息,使小海龜轉圈。
Target# ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
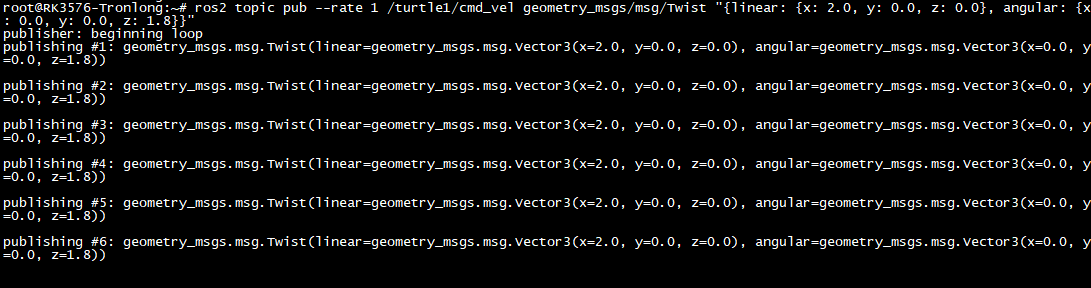
圖 12
參數解析:
(1) ros2 topic pub:發布消息到主題;
(2) --rate 1:發布消息速率,設置為1次每秒;
(3) /turtle1/cmd_vel:主題名稱;
(4) geometry_msgs/msg/Twist:發布消息類型;
(5) {linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}:發布消息的內容,線速度(linear)為x方向上的2.0、角速度(angular)為z軸方向上的1.8。

圖 13
ROS開發
請先參考《Ubuntu系統使用手冊》文檔“SDK安裝”章節正確安裝SDK。本小節主要演示基于Ubuntu的ROS系統編譯與鏡像制作方法。
開發環境搭建
打開Ubuntu終端,執行如下命令,安裝編譯所需的colcon工具。
Host# sudo apt-get install curl
Host# curl -s https://packagecloud.io/install/repositories/dirk-thomas/vcstool/script.deb.sh | sudo bash
Host# sudo apt update
Host# sudo apt-get install -y python3-pip python3-rosdep2 python3-rosinstall-generator python3-vcstool build-essential
Host# pip3 install -U colcon-common-extensions
Host# pip3 uninstall empy
Host# pip3 install empy==3.3.4
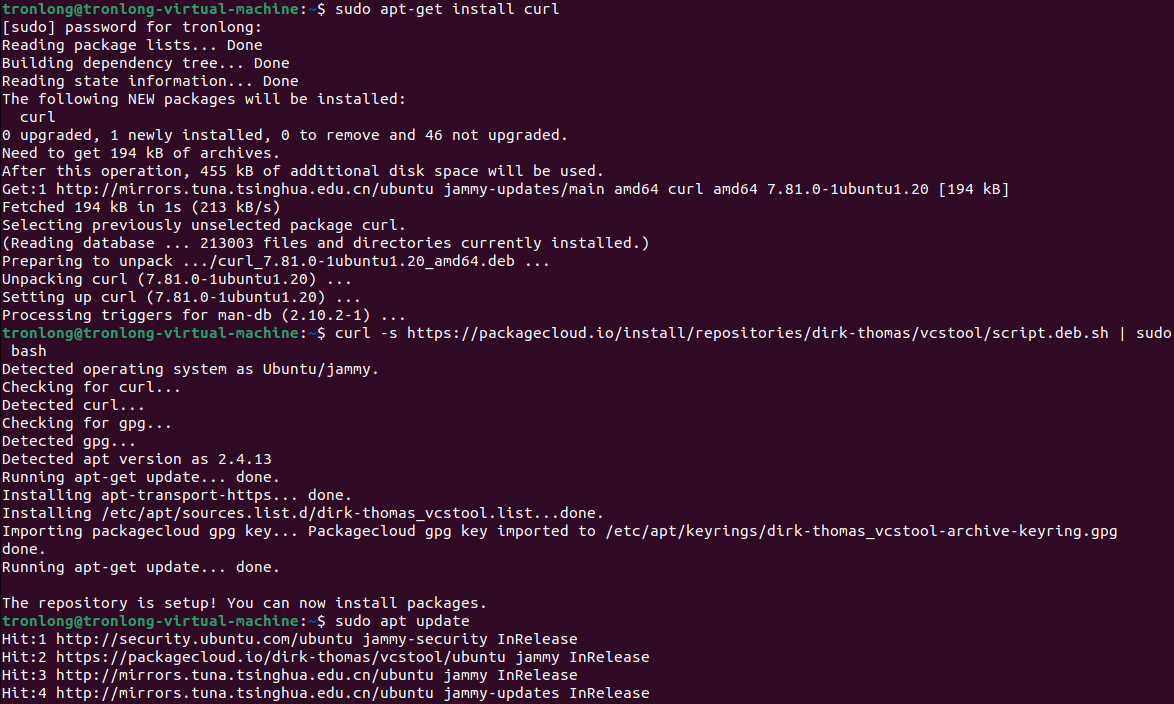
圖 14
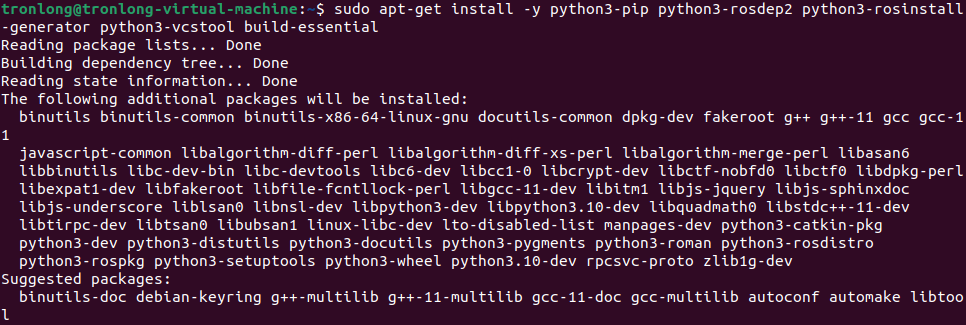
圖 15
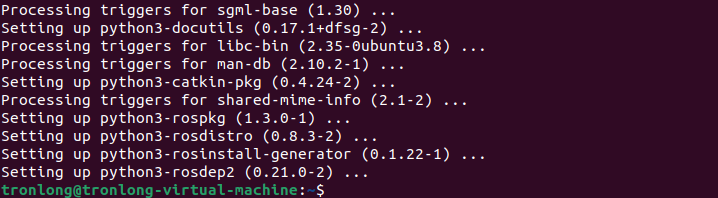
圖 16
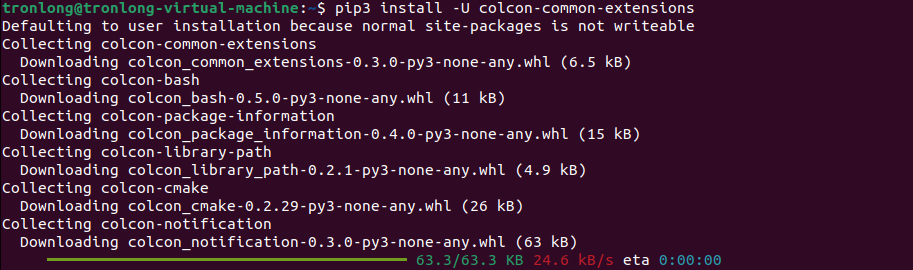
圖 17

圖 18
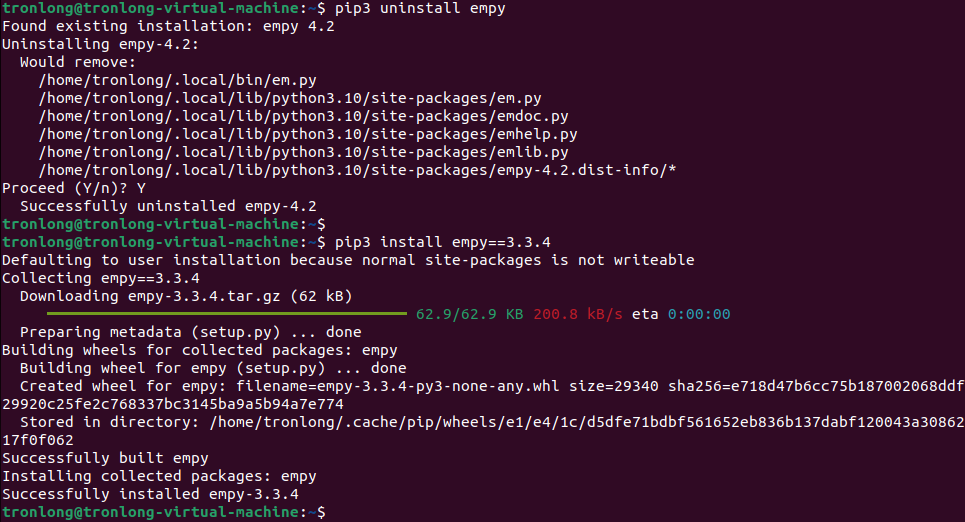
圖 19
執行如下命令,配置環境變量。
Host# export PATH=${PATH}:/home/tronlong/.local/bin

圖 20
編譯ROS軟件包
請根據交叉編譯工具鏈實際解壓路徑,執行如下命令,配置交叉編譯工具鏈。
Host# source /home/tronlong/RK3576/rk3576_linux6.1_release/ubuntu/environment

圖 21
執行如下命令,創建ROS軟件包的工作目錄,并進入該目錄,目錄可命名為任意名稱。
Host# mkdir ros2_project_test
Host# cd ros2_project_test

圖 22
執行如下命令,創建ROS軟件包源碼目錄,并進入該目錄。
Host# mkdir src
Host# cd src

圖 23
執行如下命令,在源碼目錄下生成my_package包。本案例以構建CPP功能包為例,如需構建Python功能包可將參數ament_cmake改為ament_python。
Host# ros2 pkg create --build-type ament_cmake --node-name my_node my_package
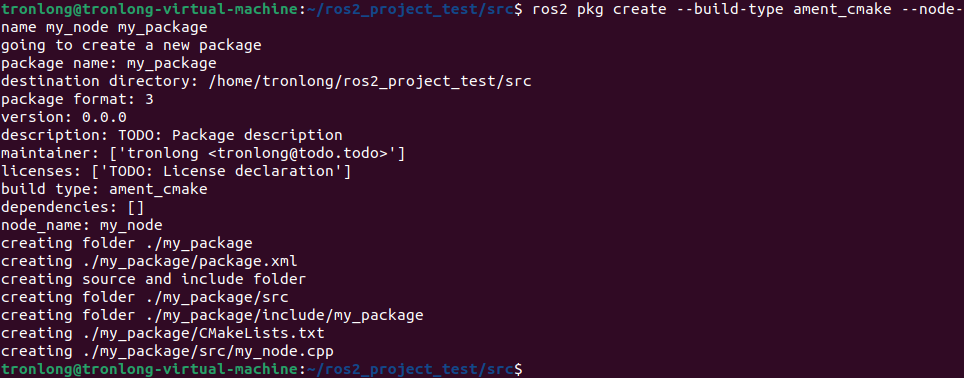
圖 24
參數解析:
--build-type ament_cmake :指定軟件包的構建類型為ament_cmake;
--node-name my_node:為軟件包指定了一個my_node節點;
--my_package:軟件包的名稱為my_package。
完成構建后,ROS軟件包源碼目錄結構如下所示。可根據實際需要對"my_package/src/my_node.cpp"進行修改。
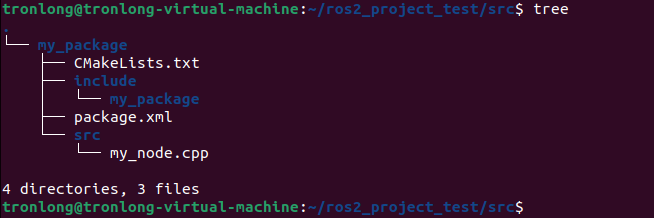
圖 25
返回ROS軟件包工作目錄,編譯軟件包。
Host# cd ..
Host# colcon build

圖 26
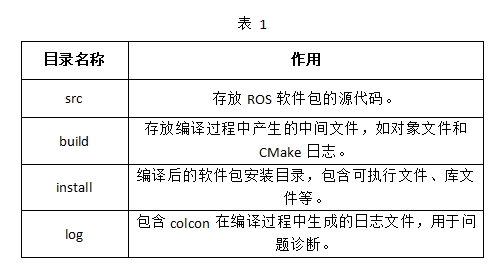
編譯完成后在當前目錄下生成如下目錄,目錄內容如下表所示。

圖 27
ROS軟件測試
請將完成編譯的ROS軟件包中install目錄拷貝至評估板文件系統"/opt/ros/"目錄下,執行如下命令配置ROS的運行環境與命令行工具。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh

圖 28
執行如下命令,加載ROS軟件包環境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros/install
Target# source /opt/ros/install/local_setup.sh

圖 29
執行如下命令,運行ROS軟件包,可以看到當前ROS軟件包程序運行打印結果。
Target# ros2 run my_package my_node

圖 30
想了解更多資料,可前往創龍科技官網或微信公眾號。
審核編輯 黃宇
-
ARM
+關注
關注
135文章
9558瀏覽量
392123 -
評估板
+關注
關注
1文章
931瀏覽量
31205
發布評論請先 登錄
米爾RK3576成功上車!ROS2 Humble生態系統體驗
創龍 瑞芯微 RK3588 國產2.4GHz八核 工業開發板—ROS2系統使用說明

RK這2款旗艦芯片RK3588 PK RK3576,誰是最優選

全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—Linux應用開發手冊
全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—Linux開發環境搭建
全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—Linux系統使用手冊
全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—LVGL應用開發案例
基于瑞芯微RK3576國產ARM八核2.2GHz A72 工業評估板——Docker容器部署方法說明
瑞芯微RK3576,8核2.2GHz+6T算力NPU工業評估板規格書
國產!瑞芯微3576-Mini(8核2.2GHz)工業評估板規格書
瑞芯微RK3576,8核2.2GHz+6T算力NPU工業核心板說明書
電魚智能EFISH-RK3576-SBC技術全解析:八核異構架構的工業突圍



 工商網監
工商網監
評論