 從控制到感知,一文讀懂納芯微的人形機器人布局(上篇)
從控制到感知,一文讀懂納芯微的人形機器人布局(上篇)

電子發燒友網報道(文 / 吳子鵬)人形機器人的控制鏈和感知鏈,構成了其實現智能化操作與環境交互的核心技術體系。憑借控制鏈與感知鏈的深度協同,人形機器人正逐步攻克非結構化環境下的多任務執行難題,成為工業、服務、醫療等領域的關鍵生產力工具。
在電子發燒友網《人形機器人的電機控制和傳感器》專題中,我們特邀納芯微技術市場經理高峰、陳旭驊兩位技術專家。他們分享了納芯微公司在人形機器人控制鏈和感知鏈方面的布局與具體實踐,以及這兩大領域的后續發展趨勢。本文為上篇,主要聚焦高峰關于納芯微在人形機器人控制鏈方面的布局闡述。
 ?
?
納芯微技術市場經理高峰
高峰指出,人形機器人的控制鏈路與傳統工業控制存在顯著差異。以電機驅動為例,首先人形機器人需具備多自由度,每個關節可能配備多個電機,像肩部、肘部等部位,需要更為復雜的協同控制算法,極大地提升了系統復雜度。而傳統電機,如傳送帶電機,往往只需控制單一自由度,僅需控制速度即可。
其次是動態平衡和實時調整。人形機器人在行走或跑步時,必須保持平衡。傳統電機,如風扇電機,設定轉速后通常無需頻繁調整。但人形機器人則需要依據傳感器數據實時調整力矩和位置,例如借助 IMU 反饋來調整姿態,防止摔倒。這就需要更快的響應時間以及更復雜的控制算法,如模型預測控制。
第三是柔順控制和安全性。鑒于人形機器人需與人類互動,安全性至關重要。傳統電機,如機床電機,可能追求高剛性以實現精準定位。但人形機器人則需要檢測外部力,例如在碰撞時減小力矩或停止運行,采用力控或阻抗控制,確保與人接觸時的安全。
第四是高精度和高動態響應。人形機器人動作復雜多樣,如快速揮手或精細抓取,這要求電機能夠快速響應(如毫秒級調整),具備更高的帶寬和更低的延遲,同時還要處理多軸同步問題。傳統電機,如洗衣機電機,對響應速度要求并不高,只需穩定轉動即可。
第五是能源效率和熱管理。人形機器人通常依靠電池供電,因此需要高效利用能源。而許多傳統電機直接連接電源,對能耗要求并不嚴苛。所以人形電機會優化控制算法以降低能耗,同時還要處理散熱問題,因為緊湊的結構可能導致熱量積聚,影響性能和壽命。
第六是環境適應性和魯棒性。人形機器人需要在不同地形工作,如上下樓梯、不平地面等,這就要求電機能夠適應變化。傳統電機一般在固定環境運行,如工廠流水線。所以人形機器人需要更強的魯棒性,以應對地面打滑、負載變化等情況,可能需要采用自適應控制算法。?
第七是集成感知與反饋。人形機器人依賴多種傳感器,如力覺、視覺、IMU 等,電機控制需要實時整合這些數據。而傳統電機可能僅使用編碼器反饋。所以人形系統需要更復雜的傳感器融合,比如利用視覺調整步態,或通過力反饋調整抓取力度。
第八是體積和重量限制。人形機器人關節空間有限,電機需要具備高功率密度,如無框電機或定制驅動器。而傳統電機一般體積較大,無需考慮緊湊設計。
基于以上對人形機器人電機控制要點的總結,我們可以看到這些都需要結合更高級的控制算法和硬件設計,來應對復雜任務和交互需求。納芯微持續深耕高階算法和高集成度產品,致力于解決人形機器人電機控制方面的高要求。
高集成的關節驅動?
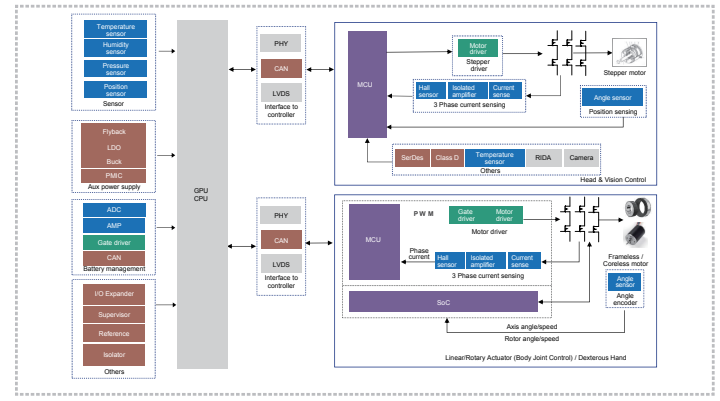
在關節驅動領域,目前無框力矩電機和空心杯電機是主要的電機類型。從原理上講,它們仍屬于永磁電機,因此其驅動架構框圖與永磁電機一致,為三相逆變電路。控制驅動板主要包含 MCU、預驅芯片(柵極驅動)、驅動MOSFET/IGBT、相電流檢測、母線電壓檢測和編碼器等。
受限于關節電機或靈活手的空間限制,整機廠或方案商通常傾向于選擇集成度更高的電機驅動 SoC和更小封裝的編碼器來實現電機控制,例如集成高壓 LDO、通信接口(一般為 CAN 或者 485 通信接口)、MCU 控制內核和預驅電路的高集成度 SoC。對于空心杯電機而言,其部署空間更小,通常尺寸在 φ8mm - φ13mm。未來,高集成度的電機驅動 SoC可能會進一步整合磁編碼器,從而實現單芯片解決方案。
納芯微目前已量產集成預驅的 NSUC1602 芯片和全集成 NSUC1610 芯片,為關節電機或靈活手帶來高集成的創新體驗。其中,納芯微 NSUC1602 內核采用 ARM Cortex - M3,內部集成 3 相 BLDC 預驅動器,能夠支持包括 FOC 矢量控制或無感六步換相控制等復雜電機算法。該芯片適用于汽車冷卻風扇、電子水泵等領域,可支持最高 1.5kW 的電機驅動。該集成芯片可直接應用于具身智能關節模組中線性 / 旋轉執行器的無邊框電機驅動,其高集成度的芯片設計,特別針對關節電機對空間要求極高的特點,優化了設計空間。
納芯微在 2023 年初推出的 NSUC1610 則是一款全集成 SoC產品,內核同樣為 ARM Cortex - M3,集成預驅、Lin收發器、LDO、MOS 管陣列、DAC 以及雙路溫度傳感器。目前已在各類車用小電機執行器,如各種閥類、空調出風口以及座椅通風功能上實現量產應用。對于空心杯電機驅動控制而言,NSUC1610 的高集成度可搭配磁編碼器MT6701 提供一種極簡的解決方案。在編碼器方面,MT6701 和 MT6826S 分別提供了 QFN3*3 及 QFN4*4 兩種小型化封裝方案,分別提供 12 位絕對角度控制以及 15 位絕對角度控制方案,能夠滿足絕大部分空心杯電機的應用需求。
高效的運動控制
在運動控制方面,納芯微推出的 NSD262x、NSD1224等柵極驅動器,在電機驅動控制中發揮著關鍵作用,能夠精確控制人形機器人的關節電機,確保機器人能夠高效、穩定地完成各種動作。這些芯片具備高功率密度、低噪聲、高精度等特性,能夠為電機提供穩定的驅動信號,實現對電機轉速、扭矩的精確控制,保障電機高效穩定運行,從而實現機器人各種復雜動作的流暢執行。
同時,頭部與視覺控制部分由 MCU 主導,利用 PWM 信號控制電機驅動和電機運轉。然后通過 Hall 傳感器的電流感知能力,結合角度傳感器、位置傳感器等,實現頭部動作的精確控制與視覺信息采集的穩定支持。納芯微在這方面也擁有豐富的方案可供選擇。
高可靠的電源和通信
針對人形機器人的電源管理,納芯微的電源管理產品包括 LDO(NSR31/33/35xxx)、Flyback(NSR284x, NSR28C4x)、Buck(NSR10Axx, NSR104xx, NSR106xx, NSR114xx, NSR1103x)等多種電源管理芯片。這些芯片能夠精確監測電池的電量、電壓和電流等參數,實現對電池的高效充電和放電管理,延長電池的使用壽命和續航能力。同時,能為機器人各部件提供適配的穩定電源,滿足不同模塊的電壓需求,保障系統正常運行。
在通信領域,納芯微的 RS485(NSI83086, NSI83085, NCA3176, NSIP83086)和 CAN(NCA1051A, NCA1042B, NSIP1042, NSI1050, NSI1042)用于機器人內部各部件間的通信連接;NSI82xx 系列隔離器則保障通信的穩定性與抗干擾性,其 I/O Expander 用于擴展輸入輸出接口;電壓監控元件 NSR7808 進行電壓監控與系統保護;NSREF30/31xx 系列電壓基準源提供參考電壓,確保系統穩定可靠運行,并為其他元件提供基準支持。
完備的工具鏈支持?
納芯微不僅為人形機器人開發提供豐富的芯片解決方案,并提供完備的設計資源支持,包括:?
嵌入式算法庫:納芯微提供基于 ARM Cortex - M3 的 FOC(磁場定向控制)和無感六步換相算法固件,支持客戶快速實現電機參數整定與動態響應優化。例如,NSUC1602 芯片內置的三相預驅電路可適配高達 1500W 的電機功率,滿足人形機器人關節高扭矩需求。
熱管理與可靠性驗證工具:結合有限元分析(FEA)模型,納芯微為客戶提供熱仿真工具支持,預測電機驅動芯片在極端溫度下的性能衰減,并內置 AEC - Q100 Grade 0 級診斷保護功能,確保在 - 40℃ - 150℃環境下穩定運行等。
行業定制化解決方案:納芯微擁有完整的電機控制解決 IP,包含 PMU,接口 CAN/LIN/485,基于 Cortex - M3 的 MCU 內核,驅動類,傳感器類以及電機控制算法研究團隊。可以針對人形機器人手部精準控制(如 NSUC1610 + MT6701 用于靈活手空心杯電機控制的解決方案)或者關節電機復雜算法實現提供定制化解決方案,助力客戶實現電機算法和優化系統方案。
關節驅動:集成預驅 SoC(NSUC1602/1610)搭配微型磁編碼器(MT6701/6826S),實現無框電機 / 空心杯電機的緊湊設計;?
運動控制:柵極驅動器提供穩定可靠的驅動信號,實現對電機轉速、扭矩的精確控制;
基礎支撐:電源管理芯片組(LDO/Buck/Flyback)保障能源效率,RS485/CAN 通信方案確保信號穩定。
?
此外,納芯微還提供了完備的開發工具鏈支持,使人形機器人方案開發更加高效。?
在電子發燒友網《人形機器人的電機控制和傳感器》專題中,我們特邀納芯微技術市場經理高峰、陳旭驊兩位技術專家。他們分享了納芯微公司在人形機器人控制鏈和感知鏈方面的布局與具體實踐,以及這兩大領域的后續發展趨勢。本文為上篇,主要聚焦高峰關于納芯微在人形機器人控制鏈方面的布局闡述。
?納芯微技術市場經理高峰
人形機器人在控制方面的特殊要求
控制和驅動系統是人形機器人實現擬人化運動與智能交互的核心技術載體。其擁有一套完整的控制鏈,涵蓋 “大腦” 類人控制、信息傳輸、關節驅動、運動控制,以及配套的電源管理。高峰指出,人形機器人的控制鏈路與傳統工業控制存在顯著差異。以電機驅動為例,首先人形機器人需具備多自由度,每個關節可能配備多個電機,像肩部、肘部等部位,需要更為復雜的協同控制算法,極大地提升了系統復雜度。而傳統電機,如傳送帶電機,往往只需控制單一自由度,僅需控制速度即可。
其次是動態平衡和實時調整。人形機器人在行走或跑步時,必須保持平衡。傳統電機,如風扇電機,設定轉速后通常無需頻繁調整。但人形機器人則需要依據傳感器數據實時調整力矩和位置,例如借助 IMU 反饋來調整姿態,防止摔倒。這就需要更快的響應時間以及更復雜的控制算法,如模型預測控制。
第三是柔順控制和安全性。鑒于人形機器人需與人類互動,安全性至關重要。傳統電機,如機床電機,可能追求高剛性以實現精準定位。但人形機器人則需要檢測外部力,例如在碰撞時減小力矩或停止運行,采用力控或阻抗控制,確保與人接觸時的安全。
第四是高精度和高動態響應。人形機器人動作復雜多樣,如快速揮手或精細抓取,這要求電機能夠快速響應(如毫秒級調整),具備更高的帶寬和更低的延遲,同時還要處理多軸同步問題。傳統電機,如洗衣機電機,對響應速度要求并不高,只需穩定轉動即可。
第五是能源效率和熱管理。人形機器人通常依靠電池供電,因此需要高效利用能源。而許多傳統電機直接連接電源,對能耗要求并不嚴苛。所以人形電機會優化控制算法以降低能耗,同時還要處理散熱問題,因為緊湊的結構可能導致熱量積聚,影響性能和壽命。
第六是環境適應性和魯棒性。人形機器人需要在不同地形工作,如上下樓梯、不平地面等,這就要求電機能夠適應變化。傳統電機一般在固定環境運行,如工廠流水線。所以人形機器人需要更強的魯棒性,以應對地面打滑、負載變化等情況,可能需要采用自適應控制算法。?
第七是集成感知與反饋。人形機器人依賴多種傳感器,如力覺、視覺、IMU 等,電機控制需要實時整合這些數據。而傳統電機可能僅使用編碼器反饋。所以人形系統需要更復雜的傳感器融合,比如利用視覺調整步態,或通過力反饋調整抓取力度。
第八是體積和重量限制。人形機器人關節空間有限,電機需要具備高功率密度,如無框電機或定制驅動器。而傳統電機一般體積較大,無需考慮緊湊設計。
基于以上對人形機器人電機控制要點的總結,我們可以看到這些都需要結合更高級的控制算法和硬件設計,來應對復雜任務和交互需求。納芯微持續深耕高階算法和高集成度產品,致力于解決人形機器人電機控制方面的高要求。
納芯微豐富的運動控制方案
芯片作為人形機器人控制系統的核心硬件,通過多層級技術架構,實現對機器人運動、感知、決策的全方位支撐。接下來,我們一同了解納芯微針對人形機器人控制系統需求推出的芯片方案及配套設計資源。高集成的關節驅動?
在關節驅動領域,目前無框力矩電機和空心杯電機是主要的電機類型。從原理上講,它們仍屬于永磁電機,因此其驅動架構框圖與永磁電機一致,為三相逆變電路。控制驅動板主要包含 MCU、預驅芯片(柵極驅動)、驅動MOSFET/IGBT、相電流檢測、母線電壓檢測和編碼器等。
受限于關節電機或靈活手的空間限制,整機廠或方案商通常傾向于選擇集成度更高的電機驅動 SoC和更小封裝的編碼器來實現電機控制,例如集成高壓 LDO、通信接口(一般為 CAN 或者 485 通信接口)、MCU 控制內核和預驅電路的高集成度 SoC。對于空心杯電機而言,其部署空間更小,通常尺寸在 φ8mm - φ13mm。未來,高集成度的電機驅動 SoC可能會進一步整合磁編碼器,從而實現單芯片解決方案。
納芯微目前已量產集成預驅的 NSUC1602 芯片和全集成 NSUC1610 芯片,為關節電機或靈活手帶來高集成的創新體驗。其中,納芯微 NSUC1602 內核采用 ARM Cortex - M3,內部集成 3 相 BLDC 預驅動器,能夠支持包括 FOC 矢量控制或無感六步換相控制等復雜電機算法。該芯片適用于汽車冷卻風扇、電子水泵等領域,可支持最高 1.5kW 的電機驅動。該集成芯片可直接應用于具身智能關節模組中線性 / 旋轉執行器的無邊框電機驅動,其高集成度的芯片設計,特別針對關節電機對空間要求極高的特點,優化了設計空間。
納芯微在 2023 年初推出的 NSUC1610 則是一款全集成 SoC產品,內核同樣為 ARM Cortex - M3,集成預驅、Lin收發器、LDO、MOS 管陣列、DAC 以及雙路溫度傳感器。目前已在各類車用小電機執行器,如各種閥類、空調出風口以及座椅通風功能上實現量產應用。對于空心杯電機驅動控制而言,NSUC1610 的高集成度可搭配磁編碼器MT6701 提供一種極簡的解決方案。在編碼器方面,MT6701 和 MT6826S 分別提供了 QFN3*3 及 QFN4*4 兩種小型化封裝方案,分別提供 12 位絕對角度控制以及 15 位絕對角度控制方案,能夠滿足絕大部分空心杯電機的應用需求。
高效的運動控制
在運動控制方面,納芯微推出的 NSD262x、NSD1224等柵極驅動器,在電機驅動控制中發揮著關鍵作用,能夠精確控制人形機器人的關節電機,確保機器人能夠高效、穩定地完成各種動作。這些芯片具備高功率密度、低噪聲、高精度等特性,能夠為電機提供穩定的驅動信號,實現對電機轉速、扭矩的精確控制,保障電機高效穩定運行,從而實現機器人各種復雜動作的流暢執行。
同時,頭部與視覺控制部分由 MCU 主導,利用 PWM 信號控制電機驅動和電機運轉。然后通過 Hall 傳感器的電流感知能力,結合角度傳感器、位置傳感器等,實現頭部動作的精確控制與視覺信息采集的穩定支持。納芯微在這方面也擁有豐富的方案可供選擇。
高可靠的電源和通信
針對人形機器人的電源管理,納芯微的電源管理產品包括 LDO(NSR31/33/35xxx)、Flyback(NSR284x, NSR28C4x)、Buck(NSR10Axx, NSR104xx, NSR106xx, NSR114xx, NSR1103x)等多種電源管理芯片。這些芯片能夠精確監測電池的電量、電壓和電流等參數,實現對電池的高效充電和放電管理,延長電池的使用壽命和續航能力。同時,能為機器人各部件提供適配的穩定電源,滿足不同模塊的電壓需求,保障系統正常運行。
在通信領域,納芯微的 RS485(NSI83086, NSI83085, NCA3176, NSIP83086)和 CAN(NCA1051A, NCA1042B, NSIP1042, NSI1050, NSI1042)用于機器人內部各部件間的通信連接;NSI82xx 系列隔離器則保障通信的穩定性與抗干擾性,其 I/O Expander 用于擴展輸入輸出接口;電壓監控元件 NSR7808 進行電壓監控與系統保護;NSREF30/31xx 系列電壓基準源提供參考電壓,確保系統穩定可靠運行,并為其他元件提供基準支持。
完備的工具鏈支持?
納芯微不僅為人形機器人開發提供豐富的芯片解決方案,并提供完備的設計資源支持,包括:?
嵌入式算法庫:納芯微提供基于 ARM Cortex - M3 的 FOC(磁場定向控制)和無感六步換相算法固件,支持客戶快速實現電機參數整定與動態響應優化。例如,NSUC1602 芯片內置的三相預驅電路可適配高達 1500W 的電機功率,滿足人形機器人關節高扭矩需求。
熱管理與可靠性驗證工具:結合有限元分析(FEA)模型,納芯微為客戶提供熱仿真工具支持,預測電機驅動芯片在極端溫度下的性能衰減,并內置 AEC - Q100 Grade 0 級診斷保護功能,確保在 - 40℃ - 150℃環境下穩定運行等。
行業定制化解決方案:納芯微擁有完整的電機控制解決 IP,包含 PMU,接口 CAN/LIN/485,基于 Cortex - M3 的 MCU 內核,驅動類,傳感器類以及電機控制算法研究團隊。可以針對人形機器人手部精準控制(如 NSUC1610 + MT6701 用于靈活手空心杯電機控制的解決方案)或者關節電機復雜算法實現提供定制化解決方案,助力客戶實現電機算法和優化系統方案。
小結?
針對人形機器人多自由度、高動態響應需求,納芯微推出全鏈路控制解決方案:?關節驅動:集成預驅 SoC(NSUC1602/1610)搭配微型磁編碼器(MT6701/6826S),實現無框電機 / 空心杯電機的緊湊設計;?
運動控制:柵極驅動器提供穩定可靠的驅動信號,實現對電機轉速、扭矩的精確控制;
基礎支撐:電源管理芯片組(LDO/Buck/Flyback)保障能源效率,RS485/CAN 通信方案確保信號穩定。
?
此外,納芯微還提供了完備的開發工具鏈支持,使人形機器人方案開發更加高效。?
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
mcu
+關注
關注
147文章
19035瀏覽量
401268 -
機器人
+關注
關注
213文章
31263瀏覽量
223172 -
納芯微
+關注
關注
3文章
416瀏覽量
16173
發布評論請先 登錄
相關推薦
熱點推薦
從“秧歌”到“功夫”,解鎖春晚機器人背后的核“芯”密碼
電子發燒友網報道(文 / 黃山明)春節剛過,在今年的春晚節目中,最引人注目的無疑是參與度越來越高的人形機器人。相比 2025 年人形機器人只
人形機器人感知革命!創新形態機器視覺傳感器涌現
能力歸運動能力,人形機器人目前主要還是需要預設固定程序運行,離真正要實現具身智能還很遠。要實現具身智能,還需要AI、算力、感知的配合。最近速騰聚創、銳思智芯分別推出了創新形態的

人形機器人爆發背后,一個被忽視的核心技術:機器人運動學控制
前言近兩年,中國人形機器人產業進入快速發展階段。從特斯拉Optimus到國內眾多創新企業,人形機器人

人形機器人布局再升級:ST雙供應鏈賦能,國產化STM32筑牢關節與靈巧手基石
電子發燒友網報道(文/黃山明)當人形機器人從科幻電影走進產業現實,這個新興市場對核心元器件的要求正變得愈發苛刻。尤其是那顆小巧卻至關重要的微

【應用方案】全場景落地!艾為芯讓人形機器人更“懂”世界
電子針對人形機器人多模感知需求,推出系統級解決方案,覆蓋高精度感知、高能效供電與高保真交互,為機器人的“大腦、神經與聲音”提供支撐。艾為

RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
更多"、"互動更流暢"是開發者面臨的核心挑戰。傳統的單一屏幕和有限的視覺輸入已成為提升機器人智能化水平的瓶頸。而瑞芯微RK3576高性能處理器的出現
發表于 10-29 16:41
Figure 03人形機器人發布,家務機器人時代將至
創始人Brett Adcock自信表示,Figure 03是目前全球最強大的人形機器人。從2023年第一代驗證原型到現在,短短兩年時間,Fi
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
2025 世界人形機器人運動會于 8 月 17 日圓滿收官,賽場上機器人在跑步、跳躍、抓取等項目中的精彩表現,背后是運動控制、環境感知等技術
發表于 08-26 10:02

人形機器人火爆背后,先楫半導體解構運動控制芯片進化密碼
。近年來,全球人形機器人產業規模持續擴大,預計未來十年將繼續保持高速增長的趨勢。 作為國產高性能RISC-V內核MCU芯片設計企業,先楫半導體的產品涵蓋微控制器芯片及其解決方案,已貫通從
發表于 05-07 16:40
?4939次閱讀

從單芯片方案到多類型傳感,ADI賦能人形機器人創新
” 的關鍵時期,預計 2025 年至 2027 年為行業發展的窗口期,2027 年之后將迎來真正的爆發。《人形機器人產業研究報告》預測,到 2035 年,中國人形

讓人形機器人像人一樣去感知,這家國產芯片公司選擇從信號鏈入手
能力。 ? 在電子發燒友網《人形機器人的電機控制和傳感器》專題中,芯海科技模擬信號鏈產品線總經理李曉在接受電子發燒友網采訪時指出,人形

一文讀懂德州儀器的人形機器人電機驅動和傳感布局
電子發燒友網報道(文/吳子鵬)隨著 AI 大模型、電機驅動和多模態傳感等核心技術不斷取得突破,人形機器人正處于技術突破與規模量產的臨界點,展現出巨大的發展潛力。《人形




 工商網監
工商網監
評論