 國產化人形機器人原地側空翻,其中涉及到哪些MOS?
國產化人形機器人原地側空翻,其中涉及到哪些MOS?

行業背景
前幾天宇樹G1機器人實現了側空翻動作并保持了平衡,這種側空翻需要克服旋轉帶來的非對稱角動量分布問題,實驗數據顯示騰空階段角加速度峰值達180 rad/s,著陸沖擊力達4.5倍自重,對關節驅動系統爆發性和輕量化要求更高!其核心零部件國產化率超90%,成本較進口壓縮40%,恭喜中國企業以電驅降本實現彎道超車!今天合科泰為您講解人形機器人模塊構成及其涉及到的MOS管是如何為機器人側空翻完成能量轉換的。
機器人關節模組構成
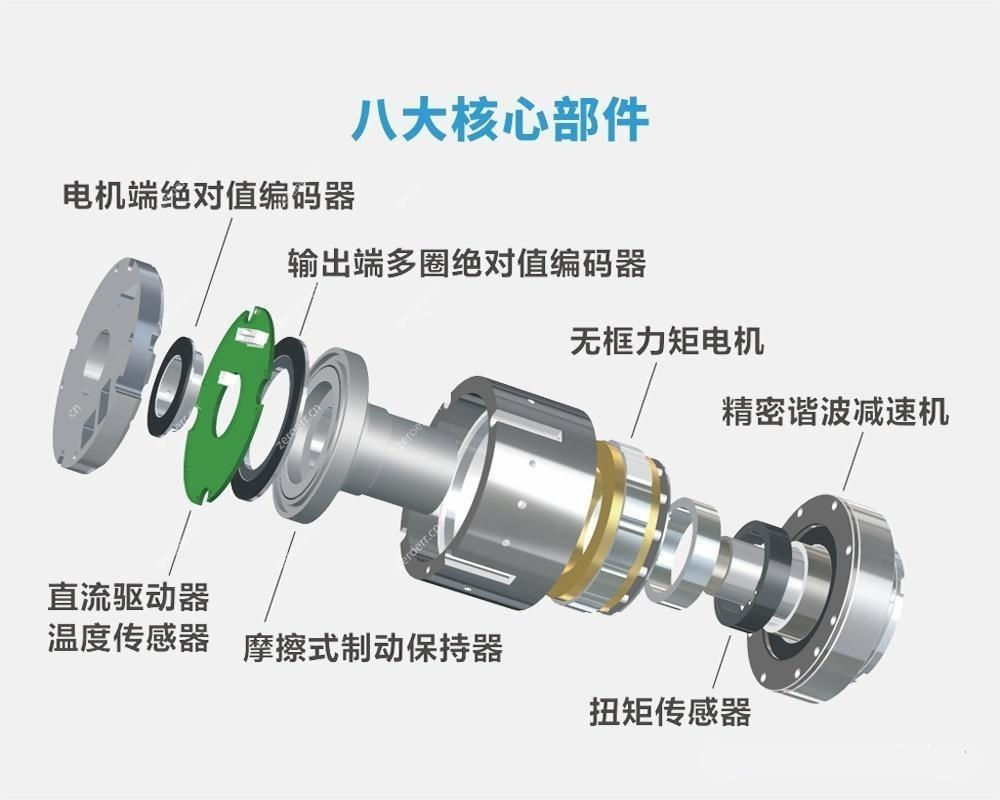
人形機器人機器人關節模塊正向“高集成、高動態、低時延”方向發展,核心在于電機、減速器、傳感器的協同優化,關節模組有八大核心部件(如圖),包括電機端絕對值編碼器、直流驅動器溫度傳感器摩、輸出端多圈絕對值編碼器、摩擦式制動保持器、無框力矩電機、扭矩傳感器、精密諧波減速機。
伺服系統負責驅動機器人的運動,由伺服驅動器和伺服電機組成。其中,伺服驅動器負責位置、速度、轉矩等各項控制;伺服電機是伺服系統中控制機械元件運轉的發動機,將接收到的電壓信號轉化為轉矩和轉速,以驅動控制對象。
MOS管應用
1、電機控制:
側空翻離地瞬間髖膝關節在10ms內輸出峰值扭矩,有高瞬時功率要求,作為電機核心驅動的MOS需具備低導通電阻(RDS(on) <1mΩ)和高電流耐受(>500)能力;且關節電機的動態響應需求,需要控制周期縮短至毫秒級,MOS的開關頻率需達100kHz以上才能滿足其快速切換響應需要;最后散熱和可靠性對電機控制也很重要。
2、電源管理:
側空翻時電池瞬間放電功率可達到50kW,通過同步整流的MOS關可實現電流轉換效率提升;通過MOS的智能開關矩陣,可優先向關鍵關節分配能量,以確保動作連貫性;而在母線電壓波動時(如±20V),TVS-MOS集成保護快速關斷MOS管,可防止過壓擊穿驅動電路。
3、信號保障:
慣性測量單元(IMU)、力矩傳感器等使用低閾值MOS,可減少采集噪聲,確保反饋精度;傳感器通過LVDS接口對數據融合處理,滿足實時控制需求。
合科泰自研MOS管導通損耗相較進口產品降低15%,在電機控制、電源管理、信號保障方面都有性能良好的MOS管。
-
MOS
+關注
關注
32文章
1749瀏覽量
101010 -
智能機器人
+關注
關注
18文章
920瀏覽量
85926 -
MOSFET管
+關注
關注
1文章
31瀏覽量
10129 -
人形機器人
+關注
關注
7文章
1006瀏覽量
18522 -
合科泰
+關注
關注
3文章
209瀏覽量
1293
發布評論請先 登錄
人形機器人感知革命!創新形態機器視覺傳感器涌現

國產人形機器人測試設備突圍:如何拿下AI 終端的 “入場券”

“入侵春晚”的背后:人形機器人邁入產業化元年

從概念到落地:靈巧手為何是人形機器人產業化的決勝環節?
德州儀器人形機器人技術線上研討會精彩回顧
電子谷機器人線束|人形機器人“神經脈絡”,穩定護航產業化

人形機器人布局再升級:ST雙供應鏈賦能,國產化STM32筑牢關節與靈巧手基石

最新發布!泰科機器人發布首款自研雙足人形機器人

藍思科技:今年承接智元機器人全系列多款人形機器人業務
對話:人形機器人連接器與線纜有何攻關點?


破解數據與泛化難題,通用人形機器人研發全面提速

樂聚機器人與地瓜機器人達成戰略合作,聯合發布Aelos Embodied具身智能

從單芯片方案到多類型傳感,ADI賦能人形機器人創新

EtherCAT科普系列(4):EtherCAT技術在人形機器人靈巧手領域應用




 工商網監
工商網監
評論