 ZMC600E,多核異構如何成就機器人精準控制?
ZMC600E,多核異構如何成就機器人精準控制?

導讀
ZMC600E主站控制器憑借其多核異構處理器的強大性能,實現了高算力與高實時性的完美平衡,讓機器人動作流暢、精準無誤。接下來,讓我們深入了解其內核結構的奧秘。
在ZMC600E主站控制器控制機器人的時候,可以精準的控制機器人執行各種高難度動作。仔細觀察的話你會發現機器人的每個關節都配合的很好,運行也是非常的流暢,幾乎沒有卡頓。究竟ZMC600E主站控制器是如何實現這么高算力、高實時性的呢?讓我們來一起看看它強大的內核結構。ZMC600E主站控制器 采用的是多核異構的處理器,處理器內部包含2個主頻1GHz的64位Arm Cortex-A53內核,4個主頻800MHz的Cortex-R5F內核。
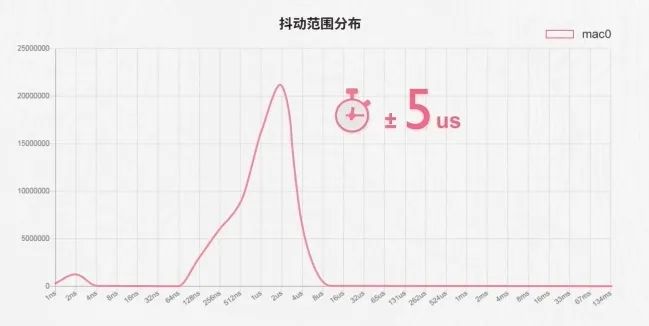
其中Cortex-A53內核運行Linux操作系統,并通過打上RT-Linux補丁來進一步提高系統的實時性,為處理算法、應用等復雜運算提供高算力的性能保障。Cortex-R5F內核則是用來單獨處理EtherCAT通訊,當有數據通訊時會第一時間對接收的數據進行處理,而無需處理其他的線程任務,降低了數據的延時和抖動,可實現毫秒周期任務抖動±5μs以內,為延遲特性提供特別出色的實時性能。
通過各個內核之間分工配合的模式,將每個內核的獨特優勢全部發揮出來,達到高算力、高實時性的效果。大家對ZMC600E還有什么想了解的,歡迎評論區留言。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
114文章
17849瀏覽量
194791 -
機器人
+關注
關注
213文章
31311瀏覽量
223364 -
ethercat
+關注
關注
20文章
1555瀏覽量
45881
發布評論請先 登錄
相關推薦
熱點推薦
SiLM2026EN-DG 小封裝大能量200V半橋驅動助力機器人精準關節控制
在工業自動化、機器人技術迅猛發展的今天,高效、緊湊、可靠的電機驅動方案成為提升設備性能的關鍵。SiLM2026EN-DG高壓半橋柵極驅動器,200V耐壓、強勁驅動電流(290mA/600mA) 以及
發表于 09-04 08:22
免費試用卡酷教育機器人精簡版套件
` 本帖最后由 12345bzq 于 2015-1-8 15:44 編輯
卡酷教育機器人精簡版套件試用體驗本次贈送項目:卡酷機器人精簡版套件贈送數量:5套贈送對象:DIY機器人愛好者贈送方式
發表于 01-08 14:40
工業機器人中面對的控制問題是什么
剛開始接觸機器人的時候,我在師兄的機器人代碼里死活找不到有關控制計算的函數,作為常年和控制框圖打交道的我,很是疑惑控制回路去哪里了?因此本文
發表于 06-28 09:29
打造一個異構機器人平臺
描述SwarmUS - 異構機器人平臺該項目旨在打造一個全包平臺,以使異構群體機器人技術成為可能。PCB+展示代碼https://github.com/SwarmUS
發表于 07-27 07:07
【新品發布】ZMC600E EtherCAT主站控制器全新上市
更多往期文章,請點擊“? 閱讀原文 ?”。 原文標題:【新品發布】ZMC600E EtherCAT主站控制器全新上市 文章出處:【微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。

ZMC900E 國產EtherCAT主站控制器 — 電源口傳導騷擾整改
高性能EtherCAT主站控制器ZMC900E是ZLG致遠電子開發的最新一代EtherCAT主站控制器,其核心采用多核異構的應用處理器,內核

EtherCAT主站控制器系統實時性測試
EtherCAT作為高效的現場總線網絡技術,其實時性能需依賴高實時操作系統才能充分展現。本文以ZMC600E為例,測試系統實時性并分析操作系統抖動數據。ZMC600EEtherCAT主站控制器是廣州
ZMC900E控制器之ROS2環境安裝指南
ZMC900E是致遠電子研發的最新一代高性能EtherCAT控制器,支持ROS2系統,兼備強大功能和實時性,為工業應用帶來新的可能。本文將詳述ROS2特點和安裝,助力用戶在機器人上的二次開發
ZMC600E運動控制器T型、S型速度規劃詳解
。ZMC600E是廣州致遠電子股份有限公司開發的最新一代高性能智能總線型控制器,是面向工廠智能化時代的機器人控制器。ZMC600E采用
ZMC600E運動控制器直線和圓弧插補算法詳解
。ZMC600E是廣州致遠電子股份有限公司開發的最新一代高性能智能總線型控制器,是面向工廠智能化時代的機器人控制器。ZMC600E采用
【一分鐘教程】用ZMC600E實現關節機器人±180度精準轉動
又是如何精準而實時的控制它們的“手腳”,從而完成各種高難度動作的?今天我們就用ZLG致遠電子的ZMC600E做一個控制機器人運動的例程,實現
探索工業自動化核心:ZMC 系列 EtherCAT 主站控制器
且高效的控制解決方案成為企業提升競爭力的關鍵。廣州致遠電子股份有限公司推出的ZMC60E、ZMC600E、ZMC900E以及ZMC900E-
如何使用機器人分析儀EtherCAT-Analyzer抓取主從站數據?
環境拓撲:ZMC600E主站連接控制TI雙從站,使用EtherCAT-Analyzer分析儀抓包數據。pc:運行ZMC主站軟件AWStudio、EtherCAT-A
具身機器人走得穩不穩?它可以說了算!
對走得穩!實測環境拓撲:ZMC600E主站連接TI雙從站,模擬具身機器人主從節點狀態,使用EtherCAT-Analyzer分析儀分析數據。pc:運行ZMC主站軟



 工商網監
工商網監
評論