 【實戰】Python+OpenCV車道線檢測識別項目:實現L2級別自動駕駛必備(配套課程+平臺實踐)
【實戰】Python+OpenCV車道線檢測識別項目:實現L2級別自動駕駛必備(配套課程+平臺實踐)

01 引言

最近,特斯拉的FSD V13.2版本引起了行業震動,它帶來了停車啟動、自動換擋等新功能,還實現了全程自動駕駛。這不僅是技術的飛躍,更是對自動駕駛未來的一次大膽展望。今天我們聊一下自動駕駛領域的一個必備技能——車道線檢測。
本文將詳細介紹一個車道線檢測項目的過程,從圖像采集到車道線的準確識別,看看在L2自動駕駛中,如何通過圖像處理技術,讓汽車“看”得更清楚,行駛得更安全。
02 項目功能
本項目旨在通過攝像頭捕捉的道路圖像,運用圖像處理技術,實現車道線的自動檢測,為自動駕駛車輛提供精確的路徑信息。項目的核心在于邊緣檢測技術,通過這一技術,車輛能夠識別道路邊緣,為后面的車道線檢測提供非常重要的基礎信息。
03 操作步驟
步驟一:圖像采集與預處理
通過車輛前置攝像頭獲取原始道路圖像,這些圖像包含了道路、車輛、行人等多種元素。為了提高車道線檢測的準確性,首先需要對圖像進行預處理。
①經過OpenCV讀取,將圖片轉化為OpenCV所對應的格式,方便后面的圖像處理。

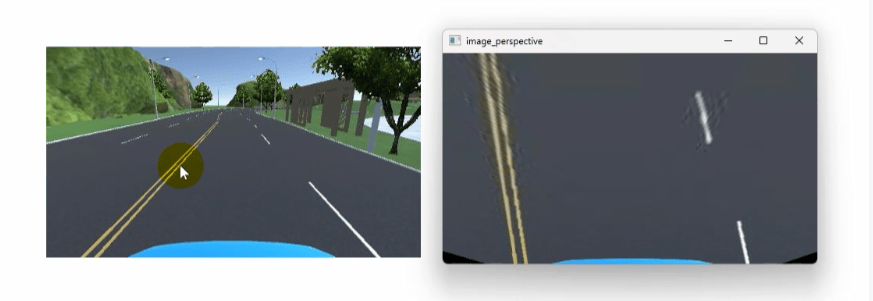
②透視變換:將原始圖像通過透視變換技術轉換成鳥瞰圖,排除建筑物、行人等外在因素的干擾,專注于道路圖像的像素處理。

步驟二:圖像邊緣檢測
①噪聲抑制,將圖像變得更加平滑,濾除圖片噪聲。

②計算梯度幅值和方向。

③非極大值抑制處理,過濾掉較小的梯度和不合理的方向,保留重要的邊緣信息。

④雙閾值檢測與邊緣連接,通過雙閾值檢測和邊緣連接技術,得到完整的車道線。

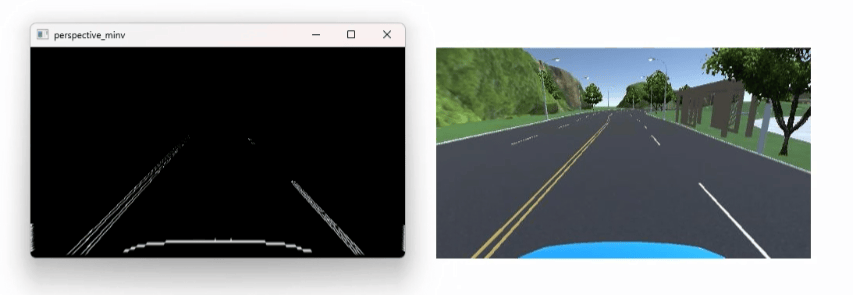
步驟三:逆透視變換
經過邊緣檢測后,得到的車道線圖像需要通過逆透視變換技術,將檢測到的車道線準確地映射回原始圖像中,確保車道線的位置與實際道路一致。
上述操作過程就是一個完整的車道線檢測項目,但只是簡單地針對一張圖片獲取以及處理的操作步驟,具體的車道線檢測項目是一個連續的實時處理過程,不僅僅涉及單張圖片的處理,而是需要系統不斷地從車載攝像頭獲取連續的實時圖像流,然后這些圖像流被不斷地處理和分析,實現對車道線的持續性檢測。
這種連續的圖像處理和車道線檢測是確保智能駕駛系統能夠準確識別道路邊界、維持車輛在車道中穩定行駛的關鍵,最終才能構成一個完整的車道線檢測項目。
04 項目實戰課
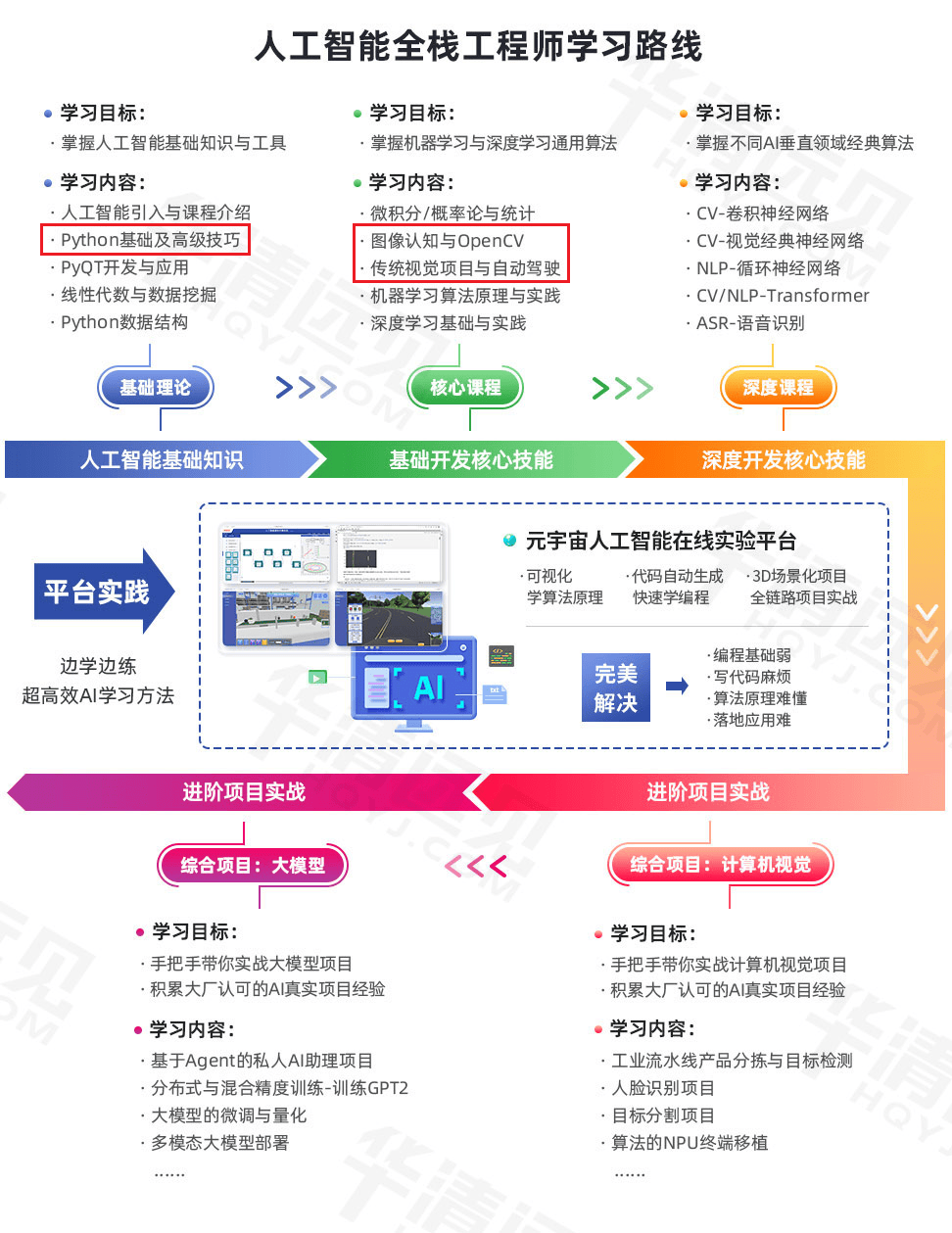
Python+OpenCV車道線檢測這個項目,大家要想體系化的學習并實戰,推薦學習華清遠見全棧工程師課程里紅框標題的這部分課程內容(如下圖)。可以手把手帶領大家,從Python基礎編程開發,到圖像認知與OpenCV,再到完整車道線檢測項目的實戰。
這部分課程是講師真人大屏授課,帶字幕,總共307講,培訓級別精講視頻。然后實踐環節是,所有算法及項目都可以通過在線平臺實操,邊學邊練,還有3D場景的沉浸式體驗。
這部分課程不單賣,可以直接購買人工智能VIP會員(按月/半年),就可以看上面紅框內容的教學視頻,當然如果您對AI體系課其他內容也感興趣的話,購買了人工智能VIP會員也是能看的,看不完的續費看就可以。
AI全體系課程有1000+講,是針對0基礎學生的AI全棧學習,覆蓋90% AI崗位技能,積累大廠真實項目經驗!
05 項目實戰平臺
車牌識別項目的全部操作依托元宇宙人工智能在線實驗平臺進行,平臺為學習者們提供了一個高效、靈活的環境,可以在平臺上無限次試錯,在項目實現過程中不斷調試參數,直到實現預期結果,更好地理解算法的工作原理。
平臺特色
【算法原理講解】
平臺將算法進行拆分與可視化,把算法拆分成多個組件,復雜的東西一旦進行拆分(分而治之)就會變得簡單多了,然后通過平臺仿真動畫深入淺出的講解原理,理解算法每一環節的原理及運行結果,而且我們可以交互式地動態調整算法參數,實時看算法運行結果變化,更好的去理解算法的原理,讓算法學習更加直觀和有趣。
【代碼編程實現】
人工智能在線實驗平臺可以將人工智能算法,快速生成Python代碼,而且當算法組件動態調參時,也可以看到Python代碼的實時變化,算法和代碼一一對應,這個功能可以幫助初學者快速的去應用算法,跑起來,看到效果,產生學習的興趣。然后在算法應用學習中,去理解代碼,去加深Python編程學習,這樣邊學邊用編程學習更高效。
【3D項目實戰】
平臺采用“3D應用場景案例實戰”教學,提供眾多3D場景化綜合項目實戰,包括:智能分揀系統、智能駕駛系統、智能垃圾分類、智能對話系統等。
邏輯與算法可接入系統里預設的3D場景中,實現可視化交互體驗,覆蓋從數據采集、標注、模型訓練、預測、部署到測試的整個項目周期,打造人工智能沉浸式實操環境。學生既能體驗全鏈路落地實戰項目,填補理論與實踐之間的鴻溝,又能提高實際操作能力和解決問題的能力。還可將程序通過編程接口API輕松部署到硬件平臺,進行遷移學習,為AI基礎學習和可視化算法實踐提供強大的項目落地應用平臺。

平臺教學子系統
上面車牌識別項目主要就是用到平臺教學子系統中的【機器視覺】部分,平臺除此之外,還提供很多系統子模塊,如:機器學習、深度學習基礎、CV-卷積神經網絡、視覺經典神經網絡、NLP循環神經網絡、CV-NLP-Transformer、綜合項目應用場景等,將理論知識變得直觀生動,同時為理論知識的應用提供了項目開發與實踐的環境。

想免費體驗該AI在線實驗平臺,后臺私信雯雯老師(備注:平臺體驗),0元免費領取平臺體驗名額哦,名額有限, 機不可失!
-
機器視覺
+關注
關注
164文章
4744瀏覽量
125260 -
人工智能
+關注
關注
1813文章
49806瀏覽量
262193 -
OpenCV
+關注
關注
33文章
651瀏覽量
44486 -
python
+關注
關注
57文章
4861瀏覽量
89671
發布評論請先 登錄

自動駕駛汽車如何確定自己的位置和所在車道?

NVIDIA與Uber合作推進全球L4級自動駕駛移動出行網絡
批準L3級自動駕駛上路意味著什么?


行深智能推出基于地平線征程6M的L4級自動駕駛解決方案
自動駕駛汽車如何正確進行道路識別?

佑駕創新車規級L4自動駕駛小巴獲項目定點
新能源車軟件單元測試深度解析:自動駕駛系統視角
地平線推出L2城區輔助駕駛系統HSD
廣汽集團L3自動駕駛乘用車率先上市
產業鏈起飛!L3級自動駕駛年內有望落地
佑駕創新成功交付L4級自動駕駛小巴項目
如何實現自動駕駛規控算法的仿真驗證

ElfBoard開源項目|百度智能云平臺的人臉識別項目






 工商網監
工商網監
評論